
Один мой знакомый подал мне идею сделать электровелосипед своими руками. Поначалу задумка мне показалась странной, но потом я вник и даже загорелся. На финальном этапе сборки у меня уже почти всё было готово, оставался лишь ШИМ регулятор. Почему-то его я тоже захотел сделать сам. Результатом вполне доволен, поэтому дальше расскажу вам то, как своими руками сделать ШИМ контроллер для электродвигателя.

Источник prom.st
Про ШИМ регулятор
ШИМ (PWM) регулятор широкого применения – устройство, разработанное для плавного включения, выключения и регулировки мощности, оборотов, яркости и другого.
Контроллер скорости, ШИМ на лодочный электромотор
Ранее для регулировки оборотов электродвигателей изменяли питающее напряжение. Однако в современной электротехнике от этого отказались. Теперь регулировка происходит путём подачи на электромотор импульсов тока, которые имеют разную длительность. Что и делают ШИМ (широтно-импульсно модулируемые) регуляторы, которые в последнее время становятся всё более и более популярными.
Схемы ШИМ контроллеров универсальны – подойдут и для регулировки яркости ламп, и для регулировки скорости оборотов мотора да хоть для регулирования силы тока в зарядном устройстве.
Сфера применения ШИМ регуляторов очень велика.
Обзор на плату
Собранная плата самодельного ШИМ регулятора:
Источник prom.st
Управление платы ручное и осуществляется переменным резистором или внешним напряжением в диапазонах:
0,45 В – устройство выключено, коэффициент заполнения – 0%
0,5/3,5 В – плавное регулирование, коэффициент заполнения от 0,1% до 99,9%
3,6 В – устройство включено, коэффициент заполнения – 100%
Устройство работает при постоянном напряжении от 10 до 28 Вольт.
Максимальное напряжение ограничено максимально допустимым напряжением силовых ключей, а также обратным напряжением мощного диода в нагрузке, при отдельном от дополнительного источника питания управления на 15 В.
Советую при напряжение не доходящим до 15 Вольт не устанавливать стабилизатор.
Вместо него лучше подойдёт какой-нибудь диод или обычная перемычка.
Если же напряжение от 15 до 28 Вольт, то стоит установить линейный (например, 7815) или импульсный стабилизатор в виде готового модуля на MP2307, при этом необходимо выставить на нём напряжение 15 Вольт.
Заказать их можно на всё том же Алиэкспрессе.
При необходимости вы можете регулировать частоту плавно переменным резистором.
Для этого нужно подключить его на плату вместо перемычки.
Схема самодельного контроллера
Данная схема содержит минимальное количество компонентов в обвязках микросхем:

Источник usamodelkina.ru
Основной контроллер ШИМ от 0% до 100%, что будет управлять всей мощностью в нагрузке, собран на микросхеме TL494.
При этом варианте включения компенсируется внутреннее смещение для формирования мертвого времени.
При коммутации больших токов возникают сильные помехи.
Изолированный источник питания +15 Вольт -12 Вольт с дополнительной защитой от перегрузок собран на микросхеме NE555.
Основной задаче является регулирование вторичных напряжений путём изменения частоты.
В зависимости от нагрузки он работает на частоте в диапазоне 120-480 кГц.
В случае перегрузки ширина импульса, а также частота, уменьшается.
Если же нагрузка отсутствует, на трансформаторе плюсовое плечо стремится к 25 вольтам, а минусовое напряжение уменьшается, пока не достигнет нуля.
Если на трансформаторе отсутствует нагрузка, то либо драйвер не подключён, либо холостой ход.
Для снижения помех и нагрузки на провода, отсекая реактивную энергию, следует установить обратный диод нагрузки в непосредственной близости к самой нагрузке.
В этом случае вы можете использовать проводники, чьё сечение меньше, чем у тех, что использовались при установке диода на удалении от нагрузки.

Источник ytimg.com
Тестирование контроллера
Одним способом применения данного контроллера является плавное регулирование оборотов электродвигателя.
При этом можно не удалять штатную дискретную схему регулировки оборотов – она остаётся, не нарушается и продолжает работать.
Схема подключается лишь тремя проводами: плюс на 12 Вольт, масса и провод самого электродвигателя.
Также плату можно использовать для замены переключателя и гасящего резистора в родной схеме.
Первым делом при тестировании убедитесь, что все детали на своём месте и надёжно закреплены.
Дальше изготовленный ШИМ регулятор для двигателя электровелосипеда должен быть одновременно подключён и к аккумулятору, и к мотору велосипеда, что будет приводить его в движение.
Используйте набор ячеек литиевых батарей, номинальное напряжение которые составляет 80 Вольт (такие батареи как раз используются в электровелосипедах).
Поворачивая потенциометр по часовой стрелке, двигатель вашего велосипеда постепенно начнёт вращаться, а его скорость увеличиваться пропорционально вращению ручки.
Если всё в порядке, то ваш самодельный ШИМ контроллер собран правильно.

Источник ytimg.com
Рекомендую следующее видео, в котором автор изготавливает ШИМ регулятор своими руками:
Как итог.
ШИМ регулятор своими руками готов. Собрать его не составит особого труда для любого, кто хоть немного разбирается в радиотехнике. Я собирал свой контроллер для использования в электродвигателе электровелосипеда, однако он может использоваться не только в двигателях. Это универсальное устройство – подойдёт и для настройки яркости ламп, и скорости оборотов мотора, и силы тока в зарядном устройстве.
Напишите в комментариях, как вы считаете насколько надёжны ШИМ-регуляторы с Алиэкспресс?
- #шим контроллер для электродвигателя 12в своими руками
- Добавить в закладки
- Прочитать позже
Источник: m-strana.ru
Драйвер мотора на 43А BTS7960
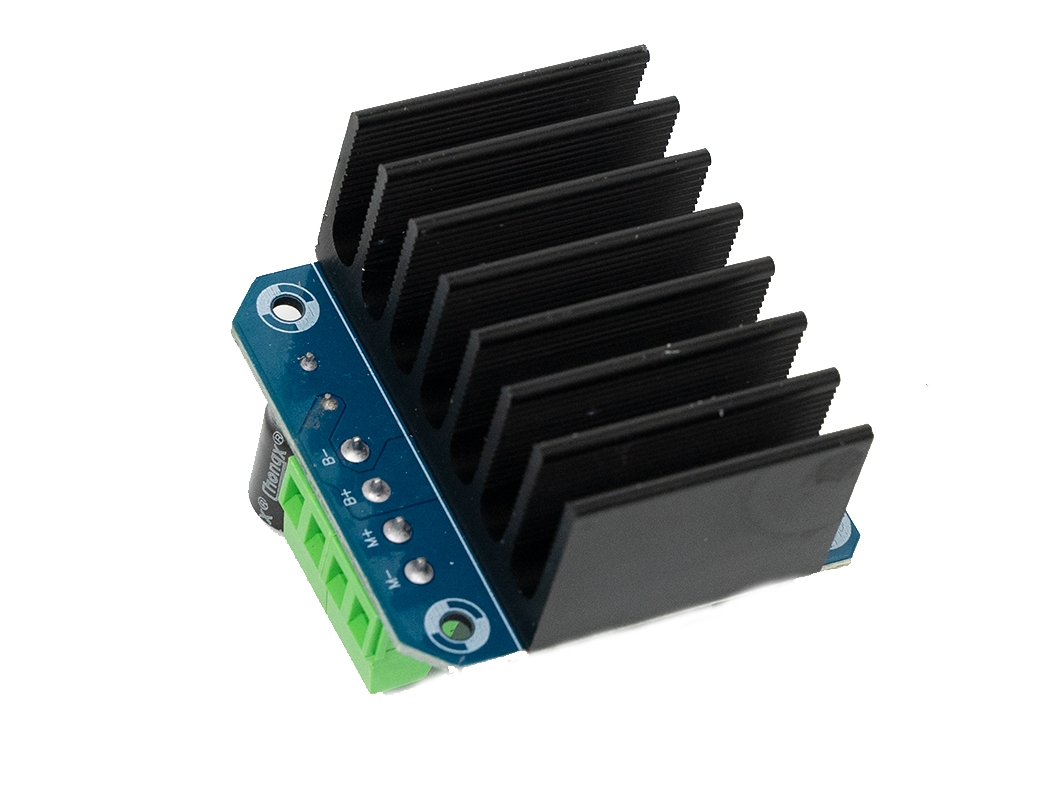
Управлять одним коллекторным двигателем рассчитанным на напряжение от 5,5 до 27,5 В постоянного тока до 43 А. Подробнее.
Модификация
Цена: >р. Наличие: > шт.
Скоро в продаже Артикул: # 855
Возможен безналичный расчёт для юридических лиц при оформлении заказа
Сообщить о поставке на e-mail:
- Доставка товаров по России, Белоруссии, Казахстану
- Возможен безналичный расчёт для юридических лиц при оформлении заказа
Количество:
![]()
в корзину >
Перейти в корзину и оформить заказ.
+7 968 454 17 38
+7 968 437-41-12
Обсудить вопросы приобретения, не технические!
*Доступно общение только текстовыми сообщениями, звонки и аудио сообщения не обслуживаются
С этим товаром берут

Отвертка, плоская
Описание товара
Подробное описание товара
Общие сведения
Драйвер мотора BTS7960 — позволяет управлять одним коллекторным двигателем рассчитанным на напряжение от 5,5 до 27,5 В постоянного тока до 43 А. Но так как клеммник установленный на плате не рассчитан на такие токи, то для долговременной работы рекомендуется использовать двигатели с током потребления до 10 А. С помощью данного драйвера можно управлять скоростью двигателя, направлением его движения, выполнять торможение и контролировать нагрузку которую испытывает двигатель.
Характеристики
- Напряжение питания двигателя: от 5,5 до 27,5 В постоянного тока (вне указанного диапазона драйвер перейдёт в режим защиты).
- Напряжение питания логики: 5 В постоянного тока.
- Максимально допустимы ток мотора: 43 А (кратковременно).
- Максимально допустимы ток мотора: 10 А (долговременно).
- Максимальная частота ШИМ на управляющих выводах: 25 кГц
- Напряжение логических уровней на управляющих выводах: 3,3 или 5 В
Подключение
Для удобства подключения к Arduino воспользуйтесь Trema Shield, Trema Power Shield, Motor Shield или Trema Set Shield.
Назначение выводов
- «M+» и «M-» — Выходы для подключения мотора.
- «M-» Выход левого плеча H-моста (чип U3).
- «M+» Выход правого плеча H-моста (чип U2).
- Вывод является флагом ошибки (если она есть), иначе с этого выхода можно снимать уровень напряжения пропорциональный току протекающему через мотор, а значит контролировать силу нагрузки приложенной к мотору.
- Вывод является флагом ошибки (если она есть), иначе с этого выхода можно снимать уровень напряжения пропорциональный току протекающему через мотор, а значит контролировать силу нагрузки приложенной к мотору.
- Сброс в 0 — отключает выход мотора «M-» (переводит его в состояние высокого импеданса).
- Установка в 1 — разрешает работу выхода мотора «M-».
- Сброс в 0 — отключает выход мотора «M+» (переводит его в состояние высокого импеданса).
- Установка в 1 — разрешает работу выхода мотора «M+».
- Сброс в 0 — устанавливает на выходе «M-» потенциал вывода «S-».
- Установка в 1 — устанавливает на выходе «M-» потенциал вывода «S+».
- Установка потенциалов «S+» или «S-» на выходе «M-» возможна только если установлена 1 на входе «L_EN».
- Сброс в 0 — устанавливает на выходе «M+» потенциал вывода «S-».
- Установка в 1 — устанавливает на выходе «M+» потенциал вывода «S+».
- Установка потенциалов «S+» или «S-» на выходе «M+» возможна только если установлена 1 на входе «R_EN»
Подключение драйвера
- Двигатель подключается к выводам «M+» и «M-» клеммника.
- Напряжение питания двигателя (5,5 — 27,5 В постоянного тока) подаётся на выводы «S+» и «S-» клеммника.
- Напряжение питания логической части (5 В постоянного тока) подаётся на выводы «Vcc» и «GND».
- Драйвером можно управлять по 2, 3, или 4 проводам:
-
Подключение драйвера мотора к Arduino по 2 проводам:
- Выводы «L_EN» и «R_EN» драйвера соединяются друг с другом и подключаются к «Vcc» (не участвуют в управлении).
- Вывод «L_PWM» подключается к любому выводу Arduino поддерживающему ШИМ.
- Вывод «R_PWM» подключается к любому выводу Arduino поддерживающему ШИМ.
-
Управление драйвером мотора по 2 проводам:
- Движение вперёд с регулировкой скорости: «L_PWM» = 0, «R_PWM» = ШИМ (чем выше ШИМ тем выше скорость).
- Движение вперёд с регулировкой скорости: «L_PWM» = ШИМ, «R_PWM» = 1 (чем выше ШИМ тем ниже скорость).
- Движение назад с регулировкой скорости: «L_PWM» = ШИМ, «R_PWM» = 0 (чем выше ШИМ тем выше скорость).
- Движение назад с регулировкой скорости: «L_PWM» = 1, «R_PWM» = ШИМ (чем выше ШИМ тем ниже скорость).
- Торможение: «L_PWM» = «R_PWM» = 0 или 1 (максимальное торможение).
-
Преимущества и недостатки схемы управления по 2 проводам:
- Явное преимущество схемы — минимальное количество задействованных выводов Arduino.
- Так как на входах «L_EN» и «R_EN» постоянно установлена 1 (они подключены к «Vcc»), значит выходы мотора «M+» и «M-» не переходят в состояние высокого импеданса (не отключаются), следовательно, можно осуществлять торможение скоростью (уменьшение скорости приводит к торможению). Это-же факт можно отнести и к недостаткам схемы, так как в ней нельзя освободить мотор, на его выводах «M+» и «M-» всегда установлены потенциалы «S+» и/или «S-».
-
Подключение драйвера мотора к Arduino по 3 проводам:
- Выводы «L_EN» и «R_EN» драйвера соединяются друг с другом и подключаются к любому выводу Arduino поддерживающему ШИМ.
- Вывод «L_PWM» подключается к любому выводу Arduino.
- Вывод «R_PWM» подключается к любому выводу Arduino.
-
Управление драйвером мотора по 3 проводам:
- Движение вперёд с регулировкой скорости: «L_PWM» = 0, «R_PWM» = 1, «EN» = ШИМ (чем выше ШИМ тем выше скорость).
- Движение назад с регулировкой скорости: «L_PWM» = 1, «R_PWM» = 0, «EN» = ШИМ (чем выше ШИМ тем выше скорость).
- Свободное вращение: «L_PWM» и «R_PWM» не имеют значения, «EN» = 0 (мотор электрически отключён).
- Торможение: «L_PWM» = «R_PWM» = 0 или 1, «EN» = ШИМ (чем выше ШИМ тем сильнее торможение).
-
Преимущества и недостатки схемы управления по 3 проводам:
- Не смотря на большее количество проводов, схема управления выглядит проще: «L_PWM» и «R_PWM» управляют направлением, а «EN» скоростью. Если на входах «L_PWM» и «R_PWM» одинаковый логический уровень, то «EN» управляет торможением.
- Есть возможность регулировать уровень торможения при помощи ШИМ без подачи напряжения (разности потенциалов) на двигатель.
- При подаче логического 0 на вход «EN», мотор электрически отключается от схемы. Например, если управляемое мотором устройство стоит на горке и на всех входах «L_PWM», «R_PWM» и «EN» установлена 1, то оно никуда не поедет, но стоит сбросить в 0 уровень на входе «EN», как мотор освободится и устройство скатится с горки. Еще одним примером может быть экономия электроэнергии: после достижения требуемой скорости, сбрасываем уровень на входе «EN» в состояние логического 0 и устройство будет продолжать движение по инерции, далее устанавливаем на входе «EN» логическую 1, набираем скорость и снова сбрасываем в 0.
- К недостаткам схемы подключения по 3 проводам можно отнести то, что в схеме не предусмотрено торможение скоростью.
-
Подключение драйвера мотора к Arduino по 4 проводам:
- Выводы «L_EN», «R_EN», «L_PWM» и «R_PWM» подключаются к выводам Arduino поддерживающим ШИМ (иначе целесообразнее использовать схему с 2 или 3 проводами).
-
Управление драйвером мотора по 4 проводам:
- В такой схеме можно осуществлять управление по любому из рассмотренных ранее вариантов управления, переключаясь с одной схемы на другую по мере необходимости.
-
Преимущества и недостатки схемы управления по 4 проводам:
- Достоинство схемы заключается в её универсальности, можно использовать достоинства двух предыдущих схем и избавиться от их недостатков.
- Явный недостаток схемы — максимальное количество задействованных выводов Arduino.
Питание
- Напряжение питания двигателя (5,5 — 27,5 В постоянного тока) подаётся на выводы «S+» и «S-» клеммника.
- Напряжение питания логической части (5 В постоянного тока) подаётся на выводы «Vcc» и «GND».
Подробнее о драйвере
Драйвер построен на базе H-моста собранного из двух полумостов на чипах BTS7960. Чипы BTS7960 поддерживают ШИМ до 25 кГц (например, у Arduino UNO частота ШИМ всего 0,5 кГц) и снабжены схемами защиты от короткого замыкания, перегрева, перенапряжения (на выводах клеммника S+ и S-) и падения напряжения ниже 5,5 В (на выводах клеммника S+ и S-).
Чипы BTS7960 имеют вывод состояния «IS» напряжение на котором меняется пропорционально току протекающему через двигатель (что позволяет определить, какую нагрузку испытывает двигатель), а в случае обнаружения ошибок, вывод «IS» работает как флаг обнаружения ошибки устанавливаясь в логическую «1». На плате выводы чипов «IS» прижаты к GND через сопротивление 10 кОм и подключены к выходам платы «L_IS» и «R_IS». На плате драйвера установлен шинный формирователь на базе чипа 74HC244 который обеспечивает развязку логических уровней управляющих сигналов между входами «L_EN», «R_EN», «L_PWM», «R_PWM» и входами чипов BTS7960. Благодаря наличию шинного формирователя управлять драйвером можно логическими уровнями как 3,3 В, так и 5 В логики.
Примеры
Управление драйвером мотора
В приведённом скетче используется схема управления драйвером по 3 проводам. Номера выводов Arduino назначаются в трёх первых строках скетча.
const uint8_t EN = 3; // № вывода Arduino к которому подключены входы драйвера L_EN и R_EN. Можно указать любой вывод Arduino поддерживающий ШИМ. const uint8_t L_PWM = 4; // № вывода Arduino к которому подключён вход драйвера L_PWM. Можно указать любой вывод Arduino, как цифровой, так и аналоговый. const uint8_t R_PWM = 5; // № вывода Arduino к которому подключён вход драйвера R_PWM. Можно указать любой вывод Arduino, как цифровой, так и аналоговый. void setup() < pinMode(EN, OUTPUT); // Конфигурируем вывод EN как выход (выход Arduino, вход драйвера) pinMode(L_PWM, OUTPUT); // Конфигурируем вывод L_PWM как выход (выход Arduino, вход драйвера) pinMode(R_PWM, OUTPUT); // Конфигурируем вывод R_PWM как выход (выход Arduino, вход драйвера) >void loop()< // Движение вперёд на 50% скорости: digitalWrite(L_PWM, LOW ); // Устанавливаем логический 0 на входе драйвера L_PWM, значит на выходе драйвера M- будет установлен потенциал S- digitalWrite(R_PWM, HIGH); // Устанавливаем логическую 1 на входе драйвера R_PWM, значит на выходе драйвера M+ будет установлен потенциал S+ analogWrite (EN, 127 ); // Устанавливаем 50% ШИМ на входах драйвера L_EN и R_EN, это скорость, можно установить от 0 (0%) до 255 (100%). delay(3000); // Ждём 3 секунды. ШИМ и логические уровни останутся без изменений, значит мотор продолжит вращаться с указанной скоростью и направлением. // Движение вперёд на 100% скорости: digitalWrite(L_PWM, LOW ); // Устанавливаем логический 0 на входе драйвера L_PWM, значит на выходе драйвера M- будет установлен потенциал S- digitalWrite(R_PWM, HIGH); // Устанавливаем логическую 1 на входе драйвера R_PWM, значит на выходе драйвера M+ будет установлен потенциал S+ analogWrite (EN, 255 ); // Устанавливаем 100% ШИМ на входах драйвера L_EN и R_EN, это скорость. Если устанавливаемое значение 255, то функцию можно заменить на digitalWrite(EN, HIGH); delay(3000); // Ждём 3 секунды. ШИМ и логические уровни останутся без изменений, значит мотор продолжит вращаться с указанной скоростью и направлением. // Свободное вращение: digitalWrite(EN, LOW ); // Устанавливаем логический 0 на входах драйвера L_EN и R_EN, значит выходы M+ и M- перейдут в состояние высокого импеданса и мотор будет электрически отключён. delay(3000); // Ждём 3 секунды. Логические уровни на входах драйвера L_PWM и R_PWM не имеют значения (могут быть любыми). // Движение назад на 50% скорости: digitalWrite(L_PWM, HIGH); // Устанавливаем логическую 1 на входе драйвера L_PWM, значит на выходе драйвера M- будет установлен потенциал S+ digitalWrite(R_PWM, LOW ); // Устанавливаем логический 0 на входе драйвера R_PWM, значит на выходе драйвера M+ будет установлен потенциал S- analogWrite (EN, 127 ); // Устанавливаем 50% ШИМ на входах драйвера L_EN и R_EN, это скорость, можно установить от 0 (0%) до 255 (100%). delay(3000); // Ждём 3 секунды. ШИМ и логические уровни останутся без изменений, значит мотор продолжит вращаться с указанной скоростью и направлением. // Движение назад на 100% скорости: digitalWrite(L_PWM, HIGH); // Устанавливаем логическую 1 на входе драйвера L_PWM, значит на выходе драйвера M- будет установлен потенциал S+ digitalWrite(R_PWM, LOW ); // Устанавливаем логический 0 на входе драйвера R_PWM, значит на выходе драйвера M+ будет установлен потенциал S- digitalWrite(EN, HIGH); // Эта функция выполнит те же действия что и функция analogWrite(EN, 255); delay(3000); // Ждём 3 секунды. Логические уровни останутся без изменений, значит мотор продолжит вращаться с указанной скоростью и направлением. // Торможение с силой 50%: digitalWrite(L_PWM, HIGH); // Устанавливаем логическую 1, но можно установить и логический 0, главное что бы уровни на входах драйвера L_PWM и R_PWM совпадали. digitalWrite(R_PWM, HIGH); // Устанавливаем логическую 1, но можно установить и логический 0, главное что бы уровни на входах драйвера L_PWM и R_PWM совпадали. analogWrite (EN, 127 ); // Устанавливаем 50% ШИМ на входах драйвера L_EN и R_EN, это сила торможения, можно установить от 0 (0%) до 255 (100%). delay(3000); // Ждём 3 секунды. За это время мотор остановится. >
Комплектация
- 1x драйвер мотора BTS7960;
Ссылки
Добавлен в корзину ✓
Убедитесь, что у вас есть все необходимое для вашего проекта – ниже представлен выбор необходимых дополнительных услуг!
Источник: iarduino.ru
Установка шим на лодочный электромотор
![]()
Товар можно купить тут
Этот обзор посвящен мощному ШИМ регулятору мощности со стоимостью чуть больше 10$
Это специализированный регулятор оборотов мощных электродвигателей постоянного тока, может управлять двигателями с мощностью до 3-х кВт.
Может быть задействован в электрокарах, мопедах и велосипедах.


Отлично подходит для регулировки мощности пассивных потребителей постоянного тока, например обогреватели мощные лампы и многое другое, в общем отличная штука, если ищете способ управления моторами и мощными низковольтными нагрузками постоянного тока.


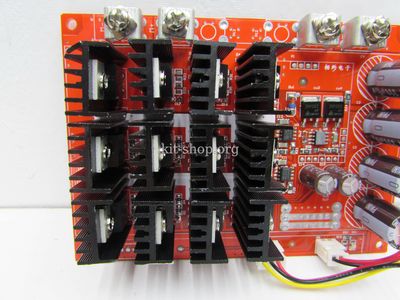
Плата состоит из генератора, двух драйверов, 8-и полевых N — канальных ключей и 4-х диодных сборок, все силовые компоненты установлены на маленькие теплоотводы.

А это основные параметры платы.
На счет схематики — в принципе срисовать можно, но пока нет времени.
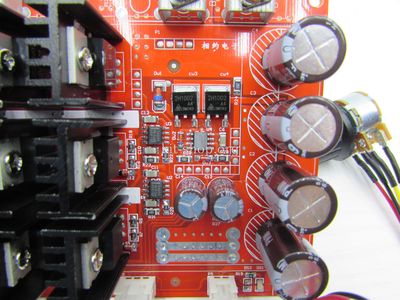
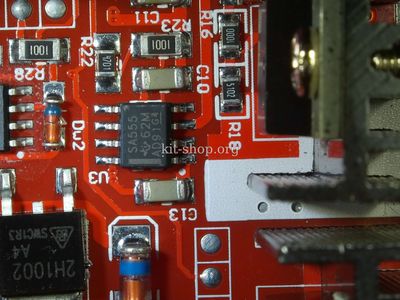
Маркировка основного генератора затерта, думаю понятно для каких целей, это маркетинговая тактика и если генератор у вас сгорит вы будете вынуждены купить новую плату.
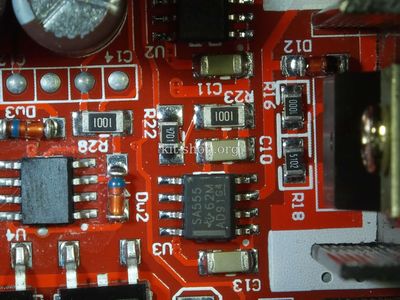
Под микроскопом весьма интересная картина, помимо микросхемы генератора мы видим две микросхемы драйвера и пара ключей для стабилизации напряжения схемы управления. Но самое интересное в драйверах — видим маркировку 555, да этот тот самый таймер 555. Работает система так — сигнал с генератора поступает на входы обеих микросхемы 555, каждая микросхема управляет 4-я полевыми ключами. Сначала не поверил глазам, что управляющим звеном является 555 таймер, но и по схематике и по напряжениям на выводах и по маркировке — это самые обычные микросхемы 555.
Маркировка полевых ключей затерта, диоды на 100В 20А, обычные диодные сборки, они для гашения паразитной самоиндукции с двигателя.


По входу видим 4 параллельных электролита 63 Вольт 330мкФ каждый.

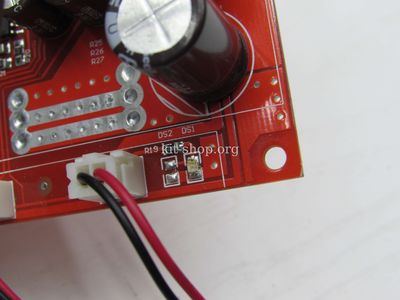
Имеем красный индикатор включения и переменный резистор с выключателем, котором собсно включаем плату и регулируем мощность.

Сама плата отличного качества, силовые шины дополнительно усилены, ничего не болтается и смотрится хорошо.

Ток ХХ не более 30-40 мА почти во всем диапазоне питающих напряжений, как и заявлял производитель.
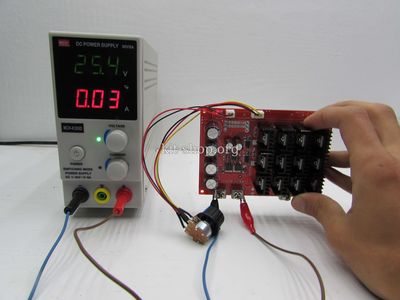
Следующим делом делом проверил минимальное напряжение питания.
Для этого к выходу платы была подключена обычная лампочка, плата сохраняет работоспособность при напряжении в 6,2 Вольт, но я заметил некорректное управление при таких низких напряжениях, все стало на свои места уже при питающем напряжении в 10 Вольт, так, что производитель прав.

Это это осциллограммы на затворе одного из ключей, где наглядно видим изменение скважности импульсов при разных положениях регулятора.
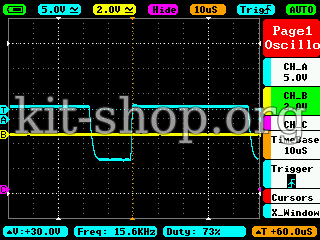
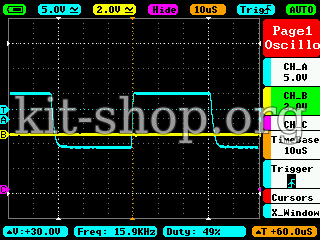
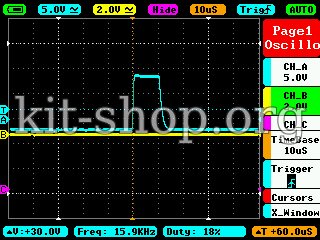
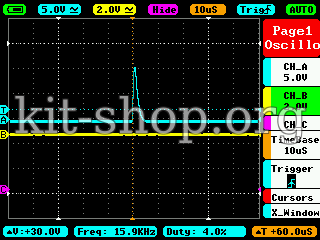
Я думаю принцип ШИМ (а если точнее ШИ) управления нет необходимости пояснять.

А это рабочая частота генератора.

Для следующего теста я долго искал подходящий источник питания, в итоге последовательно соединил автомобильный аккум (замечу дохлый), jump starter (по сути полимерный аккум на 12 Вольт) и сборку из аккумуляторов 18650, суммарное напряжение 12 Вольт, емкость 8800мА/ч, в итоге напряжение, которое подавалось на плату регулятора составило около 36 Вольт

Нагрузкой служили 3 лампы от кинопроектора с мощностью в 400 ватт при напряжении в 30 вольт, т.е. суммарно получаем около 1200 ватт.

Ваттметр показывал все, что творилось на выходе, в итоге мощность около 1200 ватт, аккумы быстро начали просаживаться, но удивительно то, что ключи на плате регулятора были еле теплые, хотя разогнал лишь на 30-35% от заявленного максимума, думаю 3000 ватт потерпит, хотя нужно будет принудительно охлаждать ключи.



Источник: www.kit-shop.org