СОНАР СОНАР [от латинского so(und) na(vigation) and r(anging) — звуковая навигация и определение дальности], термин, встречающийся в переводной научно-технической литературе для обозначения гидролокаторов.
Современная энциклопедия . 2000 .
Синонимы:
Смотреть что такое «СОНАР» в других словарях:
- сонар — гидролокация, гидролокатор Словарь русских синонимов. сонар сущ., кол во синонимов: 2 • гидролокатор (3) • … Словарь синонимов
- СОНАР — СОНАР, см. ГИДРОЛОКАТОР … Научно-технический энциклопедический словарь
- сонар — гидролокатор англ.: sonar, sound navigation and ranging англ … Словарь сокращений и аббревиатур
- Сонар — [от латинского so(und) na(vigation) and r(anging) звуковая навигация и определение дальности], термин, встречающийся в переводной научно–технической литературе для обозначения гидролокаторов. … Иллюстрированный энциклопедический словарь
- сонар — [от англ. so(und) na(vigation) and r(anging) звуковая навигация и определение дальности], 1) гидролокация. 2) Гидролокатор. Термин «сонар» встречается в переводной научно технической литературе. * * * СОНАР СОНАР [от англ. so(und) na(vigation)… … Энциклопедический словарь
- Сонар — от англ. SOund NAvigation and Ranging, эхолот, устройство для обнаружения в воде объектов посредством отражения звуковой волны: ஐ Мы уже думаем, будто бы знаем, из чего состоит атом, но прибегаем лишь к аналогии, которая является случайной… … Мир Лема — словарь и путеводитель
- сонар — sonaras statusas T sritis radioelektronika atitikmenys: angl. sonar vok. Sonar, n rus. сонар, m pranc. sonar, m … Radioelektronikos terminų žodynas
- сонар — sonaras statusas T sritis Standartizacija ir metrologija apibrėžtis Hidroakustinis matuoklis povandeninio laivo ar kitokio objekto vietai nustatyti. atitikmenys: angl. sonar; sound navigation and ranging device vok. hydroakustisches Ortungsgerät … Penkiakalbis aiškinamasis metrologijos terminų žodynas
- СОНАР — [от англ. so(und) na(vigation) and r(anging) звуковая навигация и определение дальности], 1) гидролокация. 2) Гидролокатор. Термин С. встречается в переводной науч. техн. лит ре … Естествознание. Энциклопедический словарь
- Сонар — … Википедия
Источник: dic.academic.ru
Как работает гидролокатор (сонар)? 3D анимация Mozaik Education
Сонары. Для чего они?

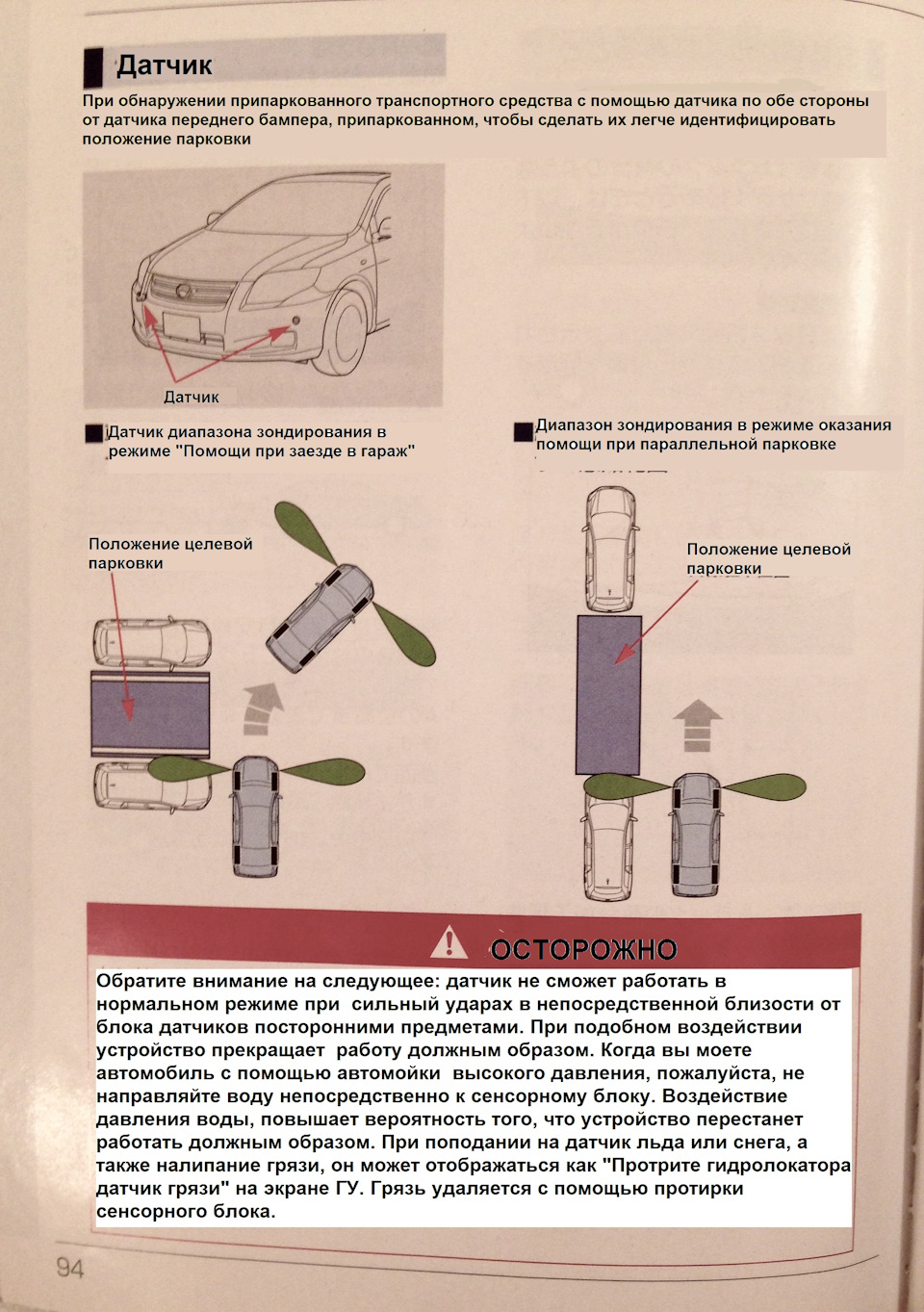
В моей комплектации Тойота Королла Аксио имеет два боковых сонара, расположенных по бокам переднего бампера. Вот здесь:

Полный размер
В начале эксплуатации авто у меня всегда возникал вопрос: почему не издается никаких звуков при приближении к препятствию? Если нет звукового предупреждения, то для чего нужна данная опция? Как ее включить?
На дроме нашел вот такую тему:
forums.drom.ru/toyota-cor…er-carib/t1151375280.html
Сонар и Радар — что это такое? чем они отличаются ?
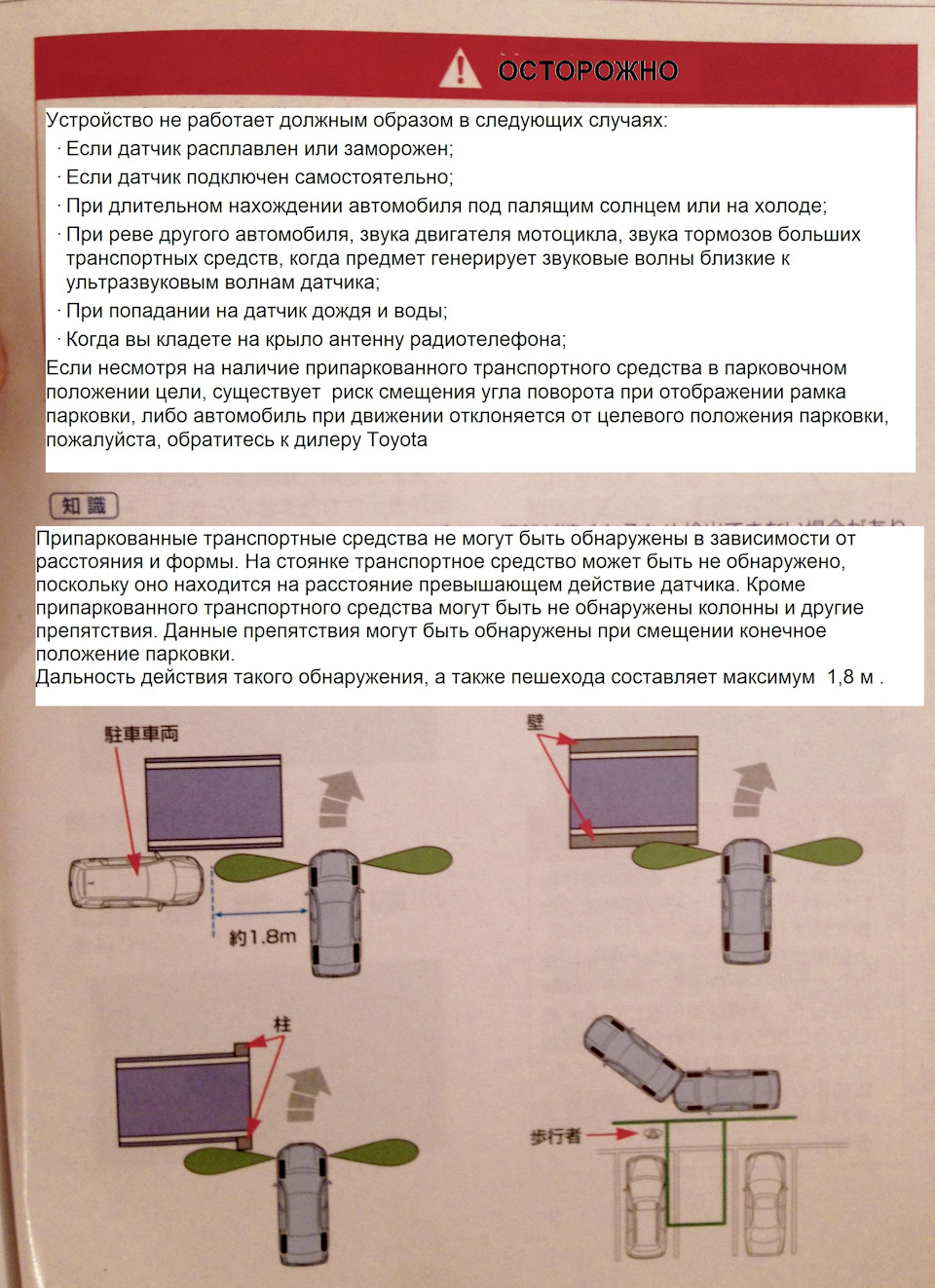
Но ясности она не внесла. В результате пришлось переводить соответствующие страницы мануала:
Полный размер
Полный размер
После перевода и преобразования результатов в разумный русский язык я пришел в выводу, что сонары в данной комплектации выполняют роль помощника при использовании парк-ассиста. Это их единственная функция. По прямому назначению, а именно информирование о приближающем препятствии их использовать невозможно.
Может быть данная информация будет кому-нибудь полезна.
Всем удачи, не забудьте выполнить свой гражданский долг!
18 сентября 2016
Поделиться:


Боковые сонары идут для автоматической парковки

Они как то странно работают, фактически только определяют положение авто. Хотя может быть они у меня неисправны

не дали проголосовать за любимую партию по временной регистрации
сказали должен был за месяц подсуетиться, поехать хер знает куда и написать заяву на участие в их смешных выборах
а вот например за ЖКХ на мою физиономию начали начислять на следующий день после покупки квартиры
Dura lex, sed lex.
По латыни это означает закон суров, но это закон или закон есть закон!
Мне уже давно интересно, почему с Владика люди уезжают кто в Питер, кто в Москву?
да пошли они нахрен со своей дуройлекс. вбрасывать за поганое едро умеют, а честного бюргера давят формальностями. пора валить. хер им и голос мой, и налогов моих вагон и маленькая тележка.
в питер — не могу сказать, для самого загадка. а в москву понятно. существует известный перекос в части касающейся распределения бабла. «нефть в обмен на ничего» — формула жирования москвы в россии. и наша задача не теряться, а вернуть отнятое у наших родителей червями-москвичами. думающими, что родившись с пропиской, они поймали бога за яйца.
как-то так.
Понятно. Везде хорошо, где нас нет. Я в силу своей профессии столкнулся с работой полиции, после этого нахожусь в полном шоке. Для того, чтобы засадить человека, можно вообще ничего не делать… А так называемый ОБЭП, это вообще одни оборотни в погонах, считающие, что удостоверение им дано для зарабатывания денег… Как могут, так и крутятся. Грустно, смотреть на это не могу…
Источник: www.drive2.ru
Что такое гидролокатор?
Гидролокатор, или сонар (от английского sonar, Sound Navigation And Ranging — определение местоположения и дальности с помощью звуковых волн) — аппаратурный гидроакустический комплекс для определения с помощью акустических сигналов положения неподвижных и плавучих объектов, полностью или частично находящихся под водой. Работа таких приборов основана на принципах гидроакустики — раздела акустики, в котором изучаются особенности распространения, отражения и затухания звуковых волн в реальной водной среде, в основном с целью локации и связи.
Звуковые волны являются единственным эффективным средством передачи и получения информации под водой. Например, электромагнитные волны сильно поглощаются водной средой, поэтому использование распространенного в других сферах радиоканала под водой невозможно. Из всех известных до настоящего времени видов энергии звуковая энергия распространяется в воде на наибольшее расстояние.

Как изобрели гидролокатор?
В «Акустическом журнале» — издании Российской академии наук — рассказывается, что становление гидроакустики началось еще с Аристотеля, который первым заметил, что звук можно слышать в воде так же, как и в воздухе.
В 1490 году итальянский ученый и художник Леонардо да Винчи писал в своих трудах: «Если остановить корабль и погрузить конец длинной трубки в воду, а другой конец поднести к уху, вы услышите корабли, находящиеся на больших расстояниях». Сейчас провести такой эксперимент будет сложнее, так как с тех пор уровень шума в морях значительно возрос: стало больше судов, ведутся различные подводные работы и т. д.
Приблизительно через 100 лет после Леонардо английский философ Фрэнсис Бэкон выдвинул идею о том, что вода является основной средой, распространяясь в которой зародившийся в ней звук достигает наблюдателя, находящегося рядом. После этого несколько веков в данном вопросе не было значительных продвижений. Лишь в 1826 году швейцарский физик Жан-Даниэль Колладон и французский математик Жак Шарль Франсуа Штурм в ходе эксперимента на Женевском озере смогли измерить скорость звука в воде при температуре 8 °C, которая оказалась равна 1 435 м/с. Это примерно на 3 м/с меньше значения, принятого в наше время.
В последние годы XIX века на плавучих маяках широко внедрялись подводные колокола, звук от которых мог регистрироваться на больших расстояниях с помощью стетоскопа или простых микрофонов, установленных на корпусе судна. Американский инженер-электрик Элиша Грей, работавший вместе с Эдисоном над улучшением телефона, обнаружил, что угольный микрофон в соответствующем водонепроницаемом кожухе может использоваться как гидрофон для приема сигналов подводного колокола. В 1899 году Грей и А. Дж. Мунди получили патент на электрический колокол для передачи подводных сигналов.
В 1914 году процесс эхолокации, известный также как дальнометрия с помощью отраженных сигналов, был достаточно разработан, чтобы обнаруживать айсберги на расстоянии 3,2 км. Начало Первой мировой войны простимулировало дальнейшее развитие гидроакустики. Во Франции русский инженер-электротехник Константин Шиловский совместно с французским физиком Полем Ланжевеном работал над прибором, включавшим в себя конденсаторный прожектор и угольный микрофон, размещенный в фокусе вогнутого акустического зеркала. В 1916 году они подали заявку на патент. В том году им удалось передать сигнал под водой на расстояние 3 км и зарегистрировать отражение от железной пластины на расстоянии 100 м.

Вопрос-ответ
После получения патента Шиловский прекратил работу над проектом, и ее продолжил Ланжевен. В 1917 году он обратил внимание на пьезоэлектрический эффект, открытый Жаком и Пьером Кюри в 1880 году, при разработке передатчика и приемника под водой. Для своего кварцевого приемника Ланжевен использовал недавно разработанный электроламповый усилитель и в 1918 году завершил работу над преобразователем на основе слоев сталь-кварц-сталь. Он смог увеличить расстояние односторонней передачи до 8 км.
Развитие компьютерных технологий после 1960-х годов сформировало основу для практически взрывного прогресса гидроакустики. Поэтому современные гидролокаторы значительно отличаются от приборов, которые появились до 1960-х, и тем более от устройств, созданных Шиловским и Ланжевеном.
Как работает гидролокатор?
Главные элементы гидролокатора — подводный излучатель, создающий звуковую волну, и приемник (гидрофон), принимающий отраженный эхосигнал. Принятые сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электронно-лучевую трубку. На рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние до объекта. С помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются. На электронно-лучевой трубке высвечивается сигнал от объекта и измеряется дистанция до него и направление.
Какие бывают гидролокаторы?
Гидролокаторы по принципу работы делятся на два типа: активные и пассивные.
Активные излучают звуковой сигнал, который отражается от цели и возвращается в приемник. Поскольку скорость звука в воде всегда примерно одинаковая (1,5 км/с), определив время между отправкой сигнала и его возвращением в виде эха, можно рассчитать расстояние до объекта.

Вопрос-ответ
Пассивные принимают звуковые сигналы, которые издает сама цель. Поскольку рыба издает слишком слабые звуковые сигналы, пассивную гидролокацию для ее поиска почти не используют. Чаще всего такие приборы применяют в исследовательских целях.
Виды гидролокаторов по способу сканирования
Согласно Большой российской энциклопедии, классификация гидролокаторов по способу сканирования включает три вида:
- Гидролокаторы с секторным обзором — излучают звуковые волны в заданном секторе. Сигнал принимает узконаправленная антенна в нескольких направлениях в пределах сектора.
- Гидролокаторы с круговым обзором — и излучение волн, и прием эха осуществляются по полному кругу, что значительно ускоряет сбор информации.
- Гидролокаторы с шаговым обзором — изучают и принимают циклически. В каждом цикле изучение ведется лишь в одном направлении, после чего антенна смещается на «шаг» и сканирует новую область. Одной из разновидностей таких приборов является гидролокатор бокового обзора, который сканирует сразу большую область сбоку от судна.
Особняком стоят эхолоты. Это упрощенный вариант гидролокатора с узконаправленным сканированием, ориентированным на морское дно. Отражаемые ото дна звуковые сигналы автоматически регистрируются в цифровой или аналоговой форме на карте.

Для чего используют гидролокаторы?
На подводных лодках приборы используют для сбора информации об окружающей среде и навигации. Иногда гидролокаторами оснащают рыболовные суда, чтобы обнаруживать косяки рыб, а биологи с помощью этих приборов изучают звуки, издаваемые морскими обитателями.
Гидролокаторы кругового и секторного обзора также используют для построения охранных зон и периметров. Такие приборы устанавливаются при входе в гавани и порты, на нефтяных платформах. Переносные приборы нередко применяются водолазами. Гидролокаторы бокового обзора полезны для прокладки и обслуживания подводных кабелей связи и трубопроводов.
Источник: aif.ru
Сонары
С онар — средство звукового обнаружения подводных объектов с помощью акустического излучения. Слово «сонар» происходит от англ. «sound navigation and ranging».
- Принцип действия
- Природа звука под водой
- Обработка сигналов
- Характеристики сонаров
- Преобразователи
- Угол излучения преобразователя
- Состояние воды и дна
- Применение сонара
Принцип действия
По принципу действия сонары делятся на активный и пассивный.

- Пассивные — позволяющие определять место положения подводного объекта по звуковым сигналам, излучаемым самим объектом (шумопеленгование)
- Активные — использующие отражённый или рассеянный подводным объектом сигнал, излучённый в его сторону сонаром
Электрический импульс от передатчика превращается преобразователем в звуковую волну, которая распространяется в водной среде. Когда звуковая волна встречает на своем пути какое-либо препятствие, то часть ее отражается и возвращается обратно к преобразователю. Преобразователь превращает отраженную звуковую волну в электрический импульс, который усиливается приемником и выводится на дисплей. Так как скорость звука в воде постоянна (примерно 1500 м/с), то, измеряя время между отправкой сигнала и возвращением отраженного эха, можно определить расстояние до найденного объекта.
Природа звука под водой
Вода, в отличие от воздуха, имеет свойство распространять звуковые колебания на большие расстояния, в этом причина использования звуковых волн под водой. Электромагнитные волны не используются, так как они распространяются лишь на небольшие расстояния.
На распространение звуковых волн в водной среде влияют факторы:
- частота и амплитуда звуковой волны
- температура
- соленость
- глубина воды
- расстояние распространения звука
- другие факторы — неоднородности в воде, участки с турбулентностью, состояние поверхности воды, тип дна
Средняя скорость звука в воде – 1480 м/с, граничные скорости: от 1450 до 1540 м/с.
Обработка сигналов
- 1. Генератора синусоидальных импульсов. Генератор состоит из двух компонентов: усилитель, выход которого подключен к собственному входу («положительная обратная связь»), из-за чего происходят колебательные отклонения сигнала; электрический фильтр, внутри которого находятся катушки индуктивности и конденсаторы, сопротивление которых зависит от частоты подаваемого сигнала. На определенных частотах сопротивление возрастает, что препятствует прохождению сигнала
- 2. Группа фильтров. Они занимаются амплитудным и фазовым затенением, формированием направления и формы пучка
- 3. Сигнал подается на усилитель и на антенну, где он преобразуется в звуковые колебания. Излучаемый звуковой сигнал называется импульсом. Импульс движется к исследуемому объекту, отражается от него и возвращается назад к сонару. Сонар в это время находится в пассивном режиме и ожидает возвращения импульса, который снова переводится в электрический сигнал. Длительность импульса должна быть меньше времени, за которое импульс движется от сонара к цели и обратно, иначе на приемнике результат будет суммироваться с исходящими волнами
Еще раз рассмотрим фильтры и процессы, которые сигнал проходит после до того, как будет излучен антенной.
Квадратурная модуляция
Чем выше частота звука (соответственно, меньше длина волны), тем выше разрешающая способность сонара (более мелкие элементы могут быть обнаружены). С другой стороны, высокая частота несет меньше энергии в каждом колебании, поэтому оно подвергается большему воздействию шума, и отношение сигнал-шум уменьшается.
Рассмотрим одно отдельное колебание. Оно несет в себе максимум и минимум своей амплитуды. Информацию при этом передает максимум амплитуды, а минимум фактически не используется. Если дублировать исследуемый сигнал, сместить его по фазе на 90 градусов и сравнить с исходным, то максимум второго сигнала окажется на одном уровне с минимумом первого.
Если передавать одновременно в одном канале эти два сигнала, их частоты останутся прежними, однако информационная насыщенность возрастет в 2 раза, так как передающий информацию максимум амплитуды будет встречаться в 2 раза чаще. Такая одновременная передача двух сигналов называется квадратурной модуляцией.
Эффект Доплера
Эффект изменения частоты звука при движении называется эффектом Доплера. Эффект Доплера для электромагнитных волн существенно отличается от наблюдаемого в воздухе, так как для электромагнитных волн отсутствует какая-либо среда-посредник, являющаяся третьей стороной в контакте приемника и передатчика волны.
Согласующий фильтр
Принятый сигнал сравнивается с исходным. В согласующем фильтре сигнал не только делится на фрагменты и сравнивается, но и суммируется с исходным сигналом, что позволяет уменьшить количество шумов, которые испытал на себе сигнал во время движения к цели и обратно. Здесь же первично оцениваются искажения сигнала и производится определение причины искажений.
Быстрое преобразование Фурье
В синусоиде, которая представляет сигнал, информация повторяется много раз. После преобразования Фурье эти повторения информации исчезают. Быстрое преобразование Фурье позволяет выполнять преобразование с меньшим количеством вычислений.
Что происходит с сигналом по прибытии на антенну:
- 1. Предварительный усилитель и фильтр полосы частот
- 2. Автоматическая регулировка усиления
- 3. Квадратурная демодуляция
- 4. Фильтр сглаживания и преобразование в цифровой вид
- 5. Переход в согласующий фильтр (компрессия импульса, описанные выше действия; компенсация движения, микро-навигация, автофокус, искусственные методы повышения разрешения) 6. Обработка изображения (формирование частей изображения, объединение их, программируемые обнаружение и классификация целей)
- 7. Вывод на экран монитора
Характеристики сонаров
Общие требования к системе:
Передатчик большой мощности
Большая мощность передатчика гарантирует возможность получения четкого эхосигнала даже с больших глубин и при плохом состоянии воды и позволяет рассмотреть мелкие детали подводного мира.
Эффективный преобразователь
Прибор должен быть способен не только проводить сигналы высокой мощности, поступающие от передатчика, он должен преобразовывать электрическую волну в звуковую с минимальными потерями. Преобразователь должен распознавать и преобразовывать самое слабое эхо.
Чувствительный приемник
Приемник работает с сигналами в широком диапазоне. Он должен подавлять сигналы большой амплитуды во время работы передатчика и усиливать слабые электрические сигналы, которые возникают, когда возвращающийся эхосигнал достигает преобразователя. Приемник также должен обеспечивать четкую видимость на экране близкорасположенных целей, разделяя для этого электрические импульсы.
Экран с высоким разрешением и контрастностью
Экран должен иметь высокое разрешение, а также обладать высокой контрастностью. Это позволяет разглядеть на экране дугообразные эхосигналы и различные мелкие объекты, расположенные под водой.
Все части системы должны быть спроектированы для совместной работы при любых погодных условиях и при любых температурах.
Рабочая частота сонаров
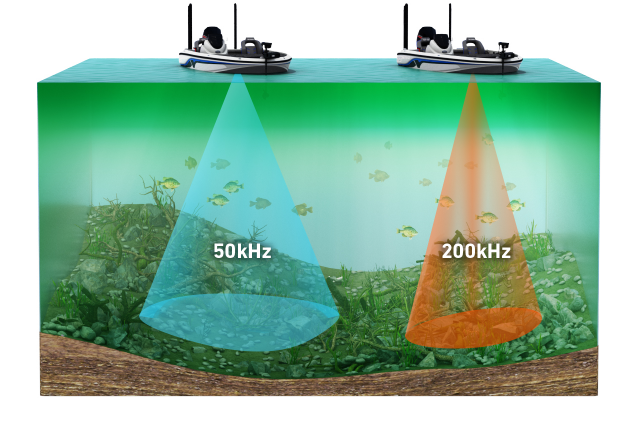
Для большинства случаев как в пресной так и соленой воде частота 192 кГц дает лучшие результаты. На этой частоте лучше видны мелкие детали, с ней сонар лучше работает на мелководье и в движении, на экране получается меньше «шума» и нежелательных эхосигналов. На частоте 192 кГц достигается лучшее разрешение.
Но в определенных ситуациях лучше использовать частоту 50 кГц. Так, например, излучение сонара, работающего на частоте 50 кГц (при тех же условиях и при той же мощности), способно проникать на большую глубину, чем излучение на частоте 192кГц. Это связано со способностью воды поглощать звуковую энергию, имеющую разные частоты.
Коэффициент поглощения для высоких частот больше, чем для низких. Поэтому частота 50 кГц используется в основном на больших глубинах. Угол расходимости звуковых волн при использовании частоты 50 кГц больше, чем у излучателей, работающих на частоте 192 кГц. Широкий угол обзора полезен при движении судна на мелководье, имеющем большое количество подводных скал и рифов.
| мелководье | большие глубины |
| узкий угол излучения | узкий угол излучения |
| лучшее разрешение и разделение объектов | меньшее разрешение |
| меньшая подверженность шумам | больше шумовых помех |
Преобразователи
Преобразователь является «антенной» сонара. Звуковые волны уходят от преобразователя и, распространяясь в воде, достигают какого-либо препятствия и затем, отражаясь, возвращаются обратно к преобразователю. Преобразователь выполняет две функции: преобразование электрической энергии в звуковую (излучатель) и обратно — звуковой в электрическую (приемник). Когда отраженная звуковая волна попадает на преобразователь, то он превращает ее в электрический сигнал, который поступает в приемно-усилительный блок сонара.
Каждый преобразователь может работать только на одной определенной частоте и эта частота должна совпадать с частотой, на которой работают передатчик и приемник сонара. Кроме того, преобразователь должен быть рассчитан на работу с той мощностью, которая развивается передатчиком, и при этом он должен преобразовывать в звуковую энергию максимальную часть поступающей в него электрической энергии. В то же время преобразователь должен быть достаточно чувствительным, чтобы регистрировать очень слабые возвращающиеся эхосигналы. Все это должно иметь место для одной определенной частоты (192 или 50кГц), в то время как эхосигналы других частот должны отфильтровываться.
Угол излучения преобразователя
Звуковые волны распространяются от преобразователя (излучателя-приемника) в определенном направлении. Когда звуковой импульс удаляется от преобразователя, то, чем больше становится расстояние, тем большую площадь охватывает этот импульс. Если изобразить распространение звуковых волн, то получится конус, вследствие чего появился термин «угол конуса», характеризующий расходимость звукового излучения. По оси конуса мощность звуковых волн максимальна, а по мере удаления от оси она постепенно уменьшается до нуля.

Чтобы определить значение величины угла конуса для определенного преобразователя, необходимо сначала измерить мощность излучения по оси конуса, а затем сравнить его со значениями, полученными в разных точках при удалении от оси. Далее нужно найти ту точку, в которой мощность излучения будет равна половине максимального значения (-3 db). Угол между линией, проведенной из вершины конуса через точку половинного значения мощности с одной стороны от оси и аналогичной линией с другой стороны оси, и будет искомым углом конуса.
Преобразователи с рабочей частотой 192 кГц выпускаются как с узким углом конуса, так и с широким. Преобразователи с широким углом конуса следует применять в большинстве случаев на пресноводных водоемах. В то время как преобразователи с узким углом следует применять во всех случаях рыбалки на море. Излучатели с рабочей частотой 50 кГц обычно имеют углы конуса в диапазоне от 30 до 45 градусов.
Угол эффективного конуса — это область внутри конуса излучения, эхосигналы из которой видны на экране эхолота. Увеличение уровня чувствительности увеличивает эффективный угол, позволяя видеть объекты, которые находятся гораздо дальше по сторонам.
Состояние воды и дна
На работу сонара оказывает влияние то, в какой воде он используется. В чистой пресной воде звуковые волны распространяются хорошо, а вот в соленой воде звук поглощается сильнее, к тому же он рассеивается на многочисленных взвешенных в морской воде частицах. Рассеиванию сигналов сонара способствуют содержащиеся в морской воде микроорганизмы, такие как мелкие водоросли и планктон. В пресной воде тоже есть течения и микроорганизмы, но их влияние на работу сонара значительно меньше.
Грязь, песок и водная растительность на дне сильно поглощают сигналы сонара, ослабляя тем самым отраженный сигнал, который формирует на экране линию дна. Камни, сланцы, кораллы и другие твердые объекты хорошо отражают сигналы сонара. Это различие заметно на экране сонара: мягкое дно, например, илистое, дает на экране тонкую линию. Твердое каменистое дно дает на экране широкую линию.
Применение сонара
Сонар имеет множество применений. Подводные лодки используют сонар для обнаружения других судов. Технологию применяют для измерения глубин (эхолот). Эхолот измеряет время, необходимое для звукового импульса, чтобы достичь дна водоема и вернуться обратно. Рыболовные суда используют эхолот или гидролокатор для поиска стай рыб.

Океанографы используют сонар, чтобы отобразить контуры дна водоема.
Сонары также используются при поиске нефти на суше. Это помогает определить места бурения, которые, скорее всего, содержат природные ресурсы (сейсморазведка).
В медицине используется особый вид сонара — УЗИ (ультразвуковое исследование) или эхоскопия. Звуковые волны разной частоты производят различное эхо при отражении от разных органов тела. Врачи научились использовать эти сигналы, чтобы определять заболевания или контролировать развитие ребенка в утробе матери.
Звуковые волны очень высокой частоты используют в медицине и промышленности для чистки поверхностей от мельчайших инородных частиц.
Источник: learnc.info
Зачем нужен датчик эхолота и как он работает?
С помощью эхолота вы можете сосредоточить свою рыбалку там, где находится рабы, например, скалы, обрывы, канавы, деревья и т.д. Без эхолота поймать рыбу гораздо сложнее, поскольку вы не знаете, где ее искать места и где она любит прятаться.
ЧТО ТАКОЕ ТРАНСДЬЮСЕР?
Датчики, обычно устанавливаемые на транце лодки, внутри корпуса или на троллинговом моторе, передают эхолокационные сигналы (пинги) в толщу воды, а затем принимают эхо-сигналы отражающиеся от находящихся в толще воды объектов.
CHIRP СОНАР
Датчики с технологией CHIRP позволяют видеть рыбу, структуру и дно с высокой четкостью — прямо из коробки и обеспечивает наилучшее отображение отдельных целей, даже когда они находятся близко ко дну или собраны в плотные группы.
DOWNSCAN С ФУНКЦИЕЙ ОБНАРУЖЕНИЯ РЫБЫ
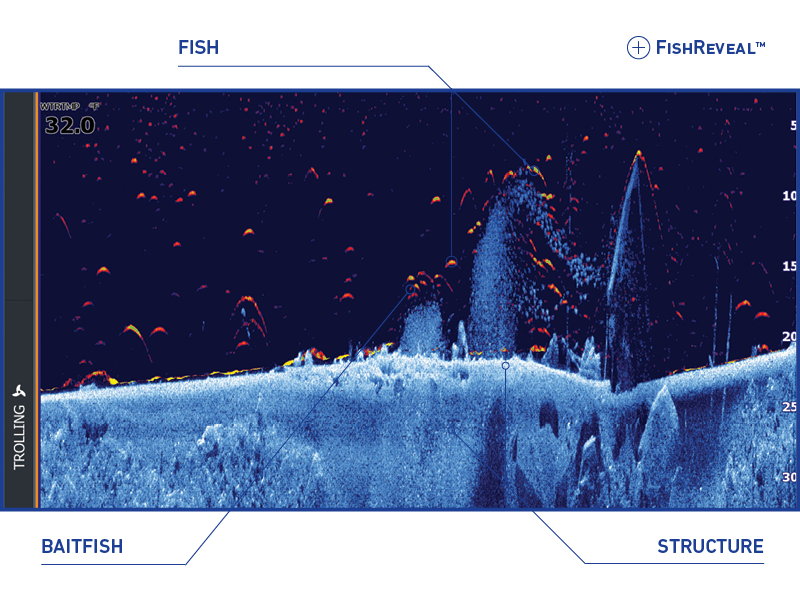
DownScan Imaging™ облегчает определение нахождения рыбы по отношению к структуре, предоставляя изображения камней, деревьев, состава дна и других подводных структур под лодкой. FishReveal™ использует изображения высокого разрешения DownScan Imaging и сочетает их с CHIRP и традиционными изображениями сонара CHIRP, облегчая поиск рыбы.
SIDESCAN — ACTIVE IMAGING
Идеально подходит для поиска рыбы на больших территориях. SideScan обеспечивает обзор до 180 метров в каждую сторону от лодки, позволяя вам отсканировать больше воды за более короткий период времени, а также просматривать места, слишком мелкие для вашей лодки — например, рядом с берегом или отмелью. Active Imaging 3-в-1 объединяет наши самые популярные сонары — CHIRP, SideScan и DownScan Imaging™ — в одном трансдьюсере.
ВПЕРЕДСМОТРЯЩИЙ ACTIVETARGET СОНАР
Возможность видеть, что происходит перед вашей лодкой. ActiveTarget Live Sonar передает изображение рыбы, плавающей вокруг структуры и реагирующей на вашу приманку — в тот момент, когда это происходит. Благодаря просмотру изображений рыбы в реальном времени, вы можете быстро внести свои коррективы. ActiveTarget также имеет режимы просмотра «вниз» и «скаут».
STRUCTURESCAN 3D
Получите реальное трехмерное изображение рыбы, структуры и контура дна. Это облегчает понимание того, где рыба и как она расположена по отношению к вашей лодке.
СТРУКТУРНОЕ СКАНИРОВАНИЕ
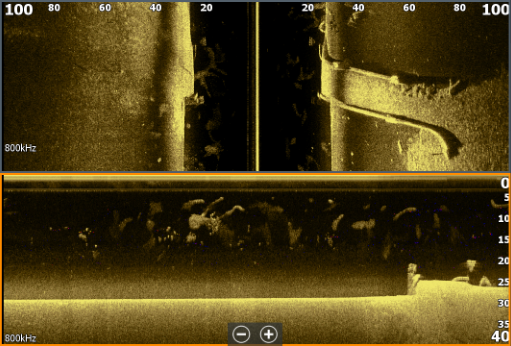
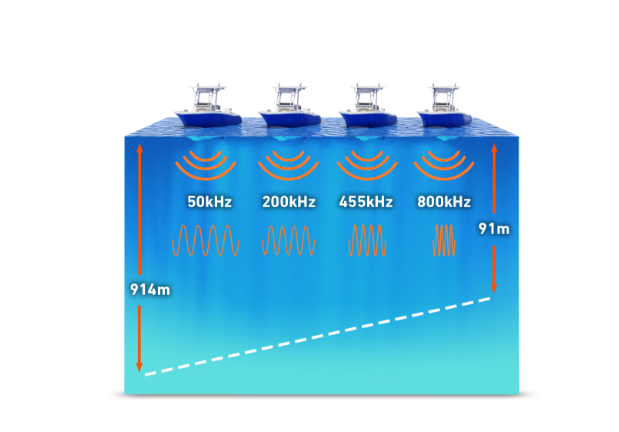
Сканирующий гидролокатор, передающий сигнал на частотах 455 кГц или 800 кГц, обеспечивает высокое разрешение изображения по бокам (SideScan) и под лодкой (DownScan Imaging). Частота 800 кГц обеспечивает наиболее четкое разрешение на малых глубинах, а частота 455 кГц обеспечивает наилучшее качество изображения на глубинах до 90м.
HDI
HDI – это датчик, сочетающий в себе традиционное широкополосное сканирование и DownScan.
ОДНОЭЛЕМЕНТНЫЕ ДАТЧИКИ
Датчики с одним пьезоэлементом способны передавать две чередующиеся частоты. Например, HST-WSBL может передавать частоты 83 и 200 кГц или средние и высокие диапазоны CHIRP.
![]()
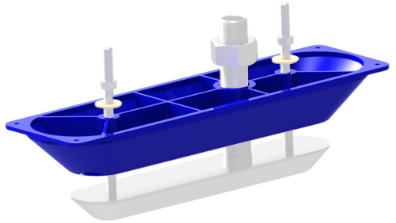
МНОГОЭЛЕМЕНТНЫЕ ДАТЧИКИ
Работают также как и одноэлементные датчики, но состоят из нескольких (иногда многих) пьезоэлементов. Это позволяет им быстрее увеличивать и уменьшать частоту, что улучшает соотношение сигнал/шум. Также такие датчики более надежны, поскольку большие одиночные элементы более хрупкие.
КАК РАБОТАЕТ СОНАР?
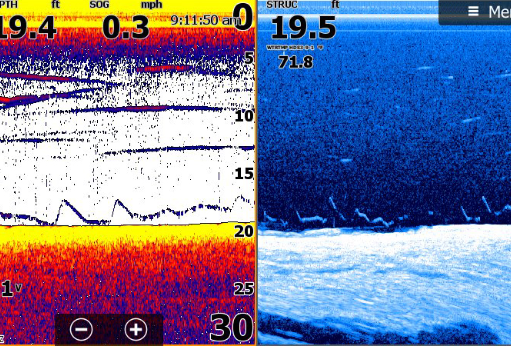
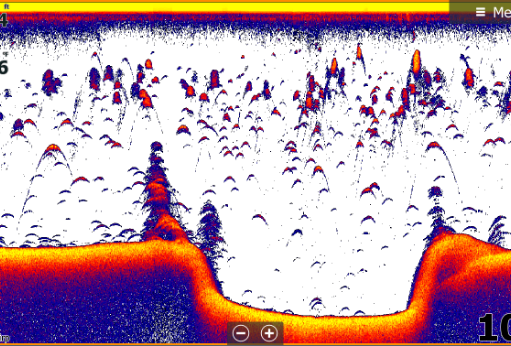
Сонар – это прибор, используемый для определения глубины и наличия объектов в воде путем отправки сигнала под воду и последующего приема его эха. Эхо возникает, когда исходный сигнал отражается от дна и объектов в толще воды между датчиком и дном. При поиске рыбы датчик показывает рыбу в виде частичной дуги или прямой линии, в зависимости от движения рыбы и лодки.

ШИРОКОПОЛОСНОЕ СКАНИРОВАНИЕ
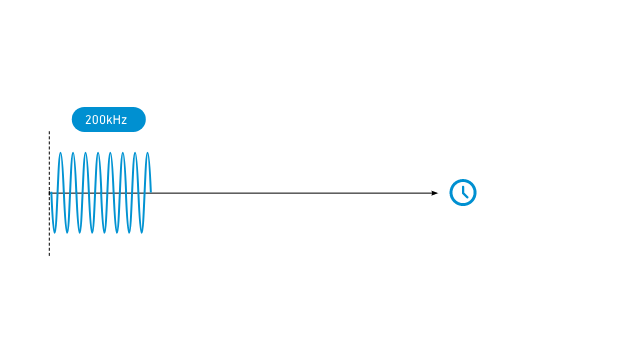
Широкополосное сканирование, являющееся более старой технологией, посылает одночастотные сигналы на частотах 200 кГц, 83 кГц или 50 кГц. Высокие частоты (200 кГц) обеспечивают наилучшее разрешение, а низкие частоты (50 кГц) позволяют достичь большей глубины.
CHIRP
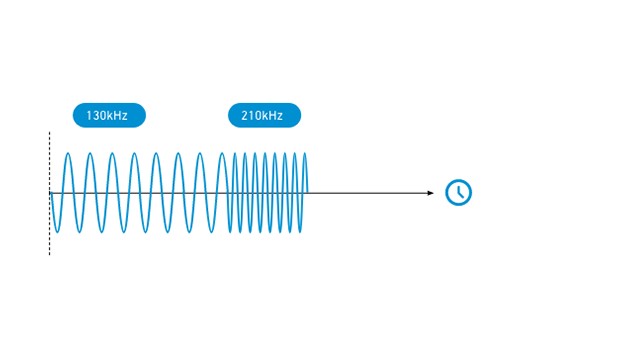
Обеспечивает более качественное изображения за счет непрерывного сканирования в диапазоне частот — обычно 28-51 кГц (низкая), 85-155 кГц (средняя) или 140-250 кГц (высокая) — что создает более полное представление о дне и объектах в толще воды.
УГОЛ СКАНИРОВАНИЯ
Традиционные эхолоты всегда передают звуковые волны в форме цилиндрического конуса. Угол луча и размер конуса зависят от частоты, на которой работает датчик. Размер конуса определяет, какую часть водоема вы можете видеть в любой момент времени, чем шире угол, тем больше площадь.
Например, у большинства 200кГЦ преобразователей угол конуса составляет менее 20 градусов. Если вы рыбачите на глубине менее 3 метров, диаметр конуса на дне составит менее 1 метра, что снижает вероятность того, что рыба попадет в зону видимости на этой глубине. Также важно отметить, чем шире угол луча, тем ниже разрешение.
ВАЖНОСТЬ ЧАСТОТ
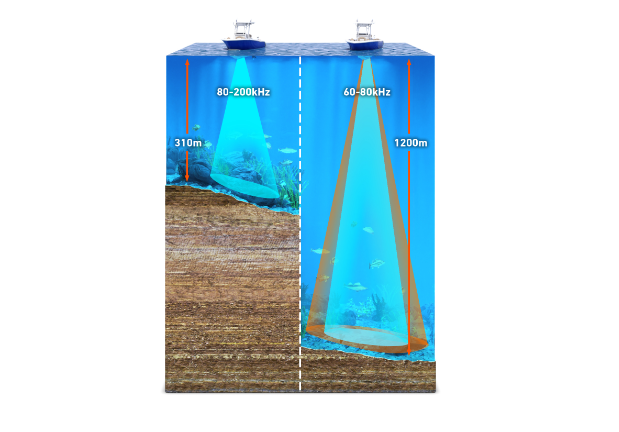
Для мелководья нужны средне- и высокочастотные датчики (от 80 до 200 кГц). Высокие частоты дают изображение с более высоким разрешением, но они не проникают далеко в воду. Для глубоководной рыбалки вам нужны низкочастотные датчики(около 50 кГц).
Некоторые датчики способны работать на нескольких частотах или диапазонах, что позволяет использовать их одновременно.
ВЫБОР ПРАВИЛЬНОГО ТРАНСДЬЮСЕРА
При наличии такого большого количества различных типов датчиков выбор подходящего может показаться сложной задачей. Эта схема поможет определить сценарии использования того или иного датчика Lowrance. Если вы ловите рыбу в прудах, озерах, прибрежных зонах или в море, у нас есть датчики, которые помогут вам найти больше рыбы.
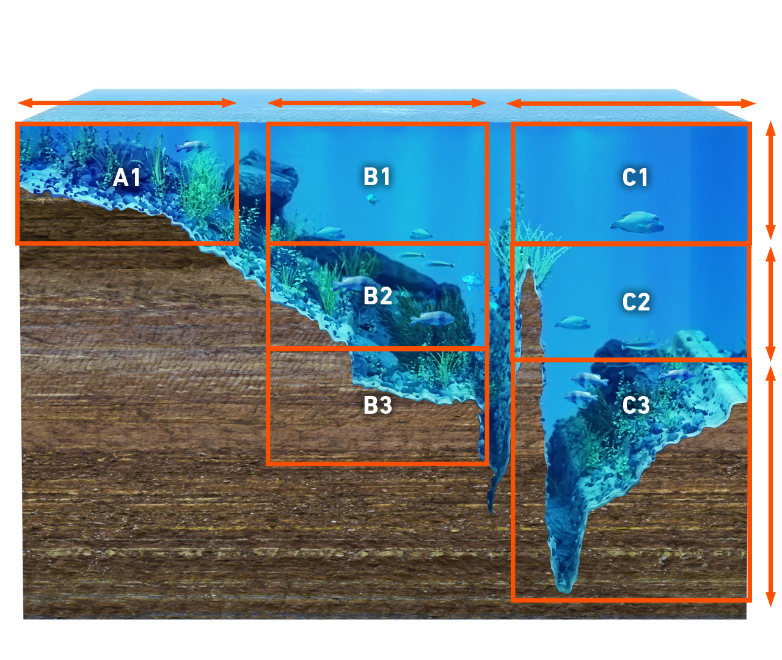
На диаграмме A1 и B1 лучше использовать широкий луч с мощностью 300 или 600 Вт, C1 — то же самое, за исключением мощности — 1 кВт. B2, C2, B3 и C3 — низкие и все они требуют узкого луча и мощности 600Вт или 1 кВт.
УСТАНОВКА И МОНТАЖ ТРАНСДЬЮСЕРА

Установка и монтаж трансдьюсера
Lowrance предлагает решения для установки датчиков на любой тип лодки и большинство каяков. Места установки зависят от типа лодки.

Трансдьюсеры, устанавливаемые на транце
Один из наиболее распространенных методов установки, датчики, устанавливаемые на транце, обычно имеют конструкцию «скиммер», которая позволяет воде плавно проходить над поверхностью датчика, когда лодка находится в горизонтальном положении.

Совет по установке на транец
При установке датчика на транце сначала прикрепите к корпусу пластиковую пластину. Это не только избавит вас от необходимости сверлить отверстия непосредственно в транце, но и улучшит обтекание преобразователя водой.

Крепление на троллинговый мотор
Многие трансдьюсеры Lowrance могут быть установлены на троллинговый мотор с помощью кронштейна, специально разработанного для определенного датчика. Другие можно установить с помощью одного из стандартных кронштейнов

Крепление на корпусе лодки
При установке на корпусе датчик крепится эпоксидной смолой к днищу стеклопластиковой лодки, передавая сигнал через дно корпуса.

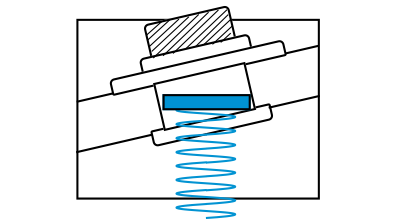
Крепление в корпусе
При установке датчика в корпус, трансдьюсер устанавливается через отверстие в днище лодки.
Блок обтекателя
Используется при установке корпуса, блок обтекателя вырезается в соответствии с килеватостью корпуса, чтобы обеспечить плавный поток воды через датчик.
Килеватость
Для корпусов, имеющих форму крыла, килеватость — это угол наклона корпуса по отношению к горизонтальной плоскости под килем судна. Учитывая, что большинство корпусов имеют определенный угол килеватости, необходимо выровнять датчик так, чтобы луч был направлен вертикально вниз. Это позволит лучу гидролокатора эффективно отслеживать дно моря/озера/реки, чтобы обратный сигнал был принят датчиком.
Источник: lowrance.ru