Изобретение относится к технике движителей для надводного и подводного транспорта и может быть использовано на пассажирских и военных кораблях, катерах, яхтах, подводных лодках, водолазных подводных аппаратах, боевых торпедах, спортивных катерах и катамаранах.
Известно техническое решение, подводный водолазный аппарат «Дип Дайвер» [1], снабженный в качестве движетеля гребным винтом, размещенным осесимметрично внутри кольца с зазором между концами лопастей и внутренней поверхностью кольцевой насадки. Такое размещение винта позволяет суммировать поток воды, перемещаемый центробежной силой с основным осевым потоком, а также уменьшить контакт вращающегося винта с посторонними предметами, например водорослями.
Недостатком такого винта в кольцевой насадке является то, что поток воды, перемещаемый центробежной силой на большой скорости, безпрепятственно ударяется во внутреннюю стенку кольцевой насадки и создает торможение вращающему моменту винта.
Известно техническое решение, разборный катамаран конструкции В. Поповича [2], у которого гребной винт также размещен осесимметрично в полости кольцевой насадки (гидродинамическом кольце).
Винт судна в работе
Недостатком этого винта в кольцевой насадке, также как и в [1] является то, что поток воды, перемещаемый центробежной силой на большой скорости безпрепятственно ударяется во внутреннюю стенку кольцевой насадки и создает торможение вращающему моменту винта.
Наиболее близким техническим решением, выбранным в качестве прототипа, является гребной винт в поворотной направляющей насадке [3], размещенный осесимметрично в полости направляющей насадки, выполненной в виде кольца. Гребной винт в такой насадке размещен с возможно малым — не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки. Такое устройство разработано для обеспечения высоких ходовых и тяговых качеств современных судов.
Недостатком гребного винта в направляющей насадке — прототипе является то, что вращающийся с большой частотой в полости направляющей насадки гребной винт обеспечивает вращение и всей массы воды, проходящей через винт, вследствие чего, в потоке вращающейся воды возникает центробежная сила, которая стремится переместить воду радиально, вдоль гребных лопаток. В результате этого поток массы воды, перемещаемый вдоль каждой из гребных лопаток с определенным давлением, ударяется во внутреннюю стенку направляющей насадки, обеспечивая плотный адгезионный контакт. Такой контакт обеспечивает большое местное гидравлическое сопротивление и таким образом обеспечивает торможение вращающемуся винту, создавая повышенное энергопотребление.
Задача, на решение которой направлено изобретение, состоит в том, чтобы при тех же оборотах винта уменьшить его энергопотребление.
Это достигается тем, что гребной винт с направляющей насадкой, содержащий установленные на ступице осесимметричной формы гребные плоскопрофильные лопасти, одна из двух поверхностей которых рабочая, которые осесимметрично размещены в трубовидной кольцевой полости с зазором между концами лопастей и внутренней стенкой насадки, при этом концы каждой лопасти загнуты под углом α, обеспечивающим параллельность внутренней поверхности насадки с поверхностями загнутых концов, и созданием между этими поверхностями зазора δ в пределах от 1% до 22%, от величины диаметра D винта, при этом высота h загнутого конца каждой лопасти относительно рабочей поверхности каждой лопасти составляет от 0,1% до 11% от величины диаметра винта, а радиус R загиба каждого конца лопасти по рабочей поверхности находится в пределах от 25% до 100% от высоты загнутого конца лопасти.
Зачем у военных субмарин СКРЫВАЮТ гребные винты
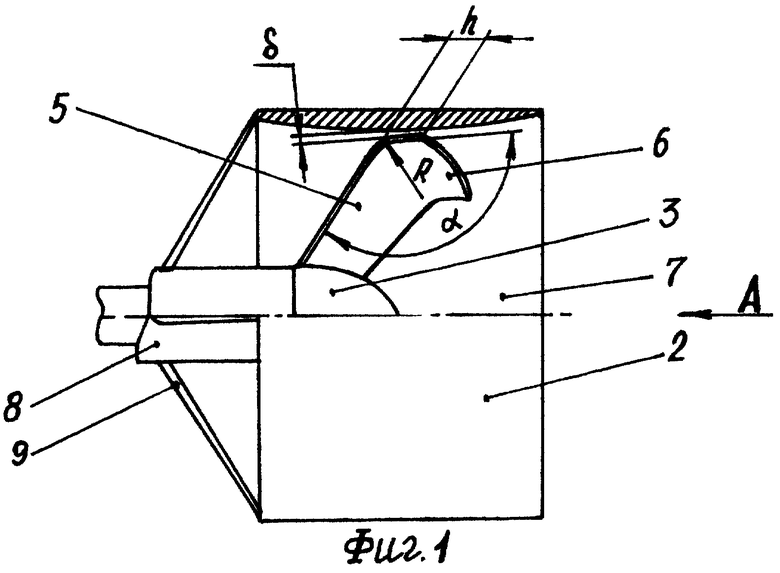
Сущность изобретения поясняется чертежами, где на фиг.1 изображено устройство размещения винта в полости направляющей насадки, показаны половина вида и половина сечения насадки; на фиг.2 — вид устройства по стрелке А.
В статическом исполнении устройство гребного винта с направляющей насадкой состоит непосредственно из гребного винта 1 с рабочим диаметром D, размещенного осесимметрично внутри трубовидной полости направляющей насадки 2. Гребной винт 1 выполнен из ступицы 3, на поверхности которой жестко прикреплены плоскопрофильные гребные лопасти 4, одна из двух поверхностей 5 которых является рабочей. В направляющей насадке 2 лопасти 4 размещены так, что между их концами 6 и внутренней поверхностью 7 насадки 2 имеется зазор δ. Концы 6 лопастей 4 загнуты в сторону их рабочих поверхностей 5 и выступают над ней на высоту h. Co стороны каждой рабочей поверхности 5 концы 6 лопастей 4 загнуты под углом α с радиусом R.
Устройство работает следующим образом.
Гребной винт 1 диаметром D с лопастями 4, имеющими загнутые в сторону рабочих поверхностей 5 концы 6, приводится во вращение относительно втулки 8, к которой на стойках 9 прикреплена трубовидная направляющая насадка 2. При вращении гребного винта в пресной или соленой воде охватывающая все его лопасти 4 вода начинает перемещаться рабочими поверхностями 5 вдоль оси вращения винта, обеспечивая перемещение плавательного средства в противоположную сторону. При этом рабочая поверхность 5 каждой лопасти выполняет роль наклонной поверхности, сдвигающей слои воды.
По такой наклонной поверхности 5 вода перемещается от передней кромки лопасти к задней кромке каждой лопасти и создает основной реактивный поток воды, направленный вдоль оси вращения, перемещая плавательной средство в противоположную сторону. При быстром вращении винта омывающая его вода получает также и большую величину центробежной силы, которая направлена радиально, вдоль рабочих поверхностей 5 лопастей 4. При этом перемещаемая центробежной силой масса воды вдоль рабочих поверхностей 5 лопастей 4 несет в себе и большую величину кинетической энергии. Но наличие на каждой лопасти 4 загнутых концов 6 обеспечивает изменение направления потока воды от действия центробежной силы и суммирование его с потоком воды перемещаемого наклонными рабочими поверхностями 5. Таким образом, вся масса воды, перемещенная центробежной силой вдоль рабочих поверхностей 5 лопастей 4, изменяет свое направление на угол α и суммируется с потоком, созданным рабочими поверхностями 5 лопастей 4, передавая ему дополнительную кинетическую энергию и увеличивая этим самым суммарную тягу винта. Одновременно с этим, наличие на лопастях 4 загнутых концов 6 исключает силовой контакт энергоемкого потока от центробежной силы с внутренней стенкой насадки 2, способствуя этим самым снижению гидродинамического сопротивления и, как следствие, снижению энергозатрат, идущих на вращение винта.
Минимальная величина зазора δ принята равной 1% от диаметра D винта 1 в виду того, что при меньшем его значении величина гидравлического сопротивления возрастает и ведет к увеличению энергозатрат. Максимальная величина зазора δ принята равной 22% от диаметра D винта 1 в виду того, что при большем его значении величина гидравлического сопротивления возрастает и также ведет к увеличению энергозатрат.
Минимальная величина высоты h загнутого конца 6 лопасти 4 принята равной 0,1% от диаметра D винта 1 в виду того, что при меньшем ее значении возрастает величина гидравлического сопротивления от безпрепятственного удара во внутреннюю стенку 7 насадки 2 радиального потока воды, созданного центробежной силой, что ведет к увеличению энергозатрат. Максимальная величина высоты h загнутого конца 6 лопасти 4 принята равной 11% от диаметра D винта 1 в виду того, что при большем ее значении возрастает величина гидравлического сопротивления от увеличения трения в зазоре δ, что также ведет к увеличению энергозатрат.
Минимальная величина радиуса R загиба каждого конца 6 лопасти 4 принята равной 25% от высоты h загнутого конца 6, в виду того, что меньшее его значение ведет к увеличению гидравлического сопротивления и, следовательно, к увеличению энергозатрат. Максимальное значение радиуса R принято равным 100% от высоты h загнутого конца 6, в виду того, что большее его значение ведет к нарушению плоскопрофильности лопасти 4. Все это позволяет реализовать поставленную техническую задачу.
Полезность данного изобретения заключается в том, что создано новое техническое решение изготовления гребного винта в направляющей насадке, позволяющее снижать энергопотребление винта на перемещение плавательного средства.
1. Журнал «Техника Молодежи» №10 за 2005 г., с.8.
2. Журнал «Моделист конструктор» №4 за 1989 г., с.4.
3. Гурович А.Н., Родионов А.А., Асиновский В.И., Гринберг Д.А. Судовые устройства (Справочник для конструкторов и проектировщиков). Ленинград, «Судостроение», 1967, с.65-67.
Похожие патенты RU2301761C1
- Абуев Валентин Лермонтович
- Ермоленко Анатолий Николаевич
- Магилат Игорь Александрович
- Месропян Арсен Владимирович
- Платонов Евгений Александрович
- Земляков Николай Васильевич
- Земляков Н.В.
- Земляков Николай Васильевич
- Мешков Виктор Иванович
- Соболев Сергей Владимирович
- Земляков Н.В.
- Гермов Юрий Леонтьевич
- Земляков Н.В.
- Палецких Владимир Михайлович
- Секретарев Геннадий Иванович
Иллюстрации к изобретению RU 2 301 761 C1

Реферат патента 2007 года ГРЕБНОЙ ВИНТ С НАПРАВЛЯЮЩЕЙ НАСАДКОЙ КОНСТРУКЦИИ ЗЕМЛЯКОВА
Изобретение относится к движителям для надводного и подводного транспорта. Гребной винт с направляющей насадкой содержит установленные на ступице осесимметричной формы гребные плоскопрофильные лопасти, одна из двух поверхностей которых рабочая, которые осесимметрично размещены в трубовидной кольцевой полости с зазором между концами лопастей и внутренней стенкой насадки.
Концы каждой лопасти загнуты под углом α, обеспечивающим параллельность внутренней поверхности насадки с поверхностями загнутых концов, и созданием между этими поверхностями зазора δ в пределах от 1% до 22% от величины диаметра D винта. Высота h загнутого конца каждой лопасти относительно рабочей поверхности каждой лопасти составляет от 0,1% до 11% от величины диаметра винта, а радиус R загиба каждого конца лопасти по рабочей поверхности находится в пределах от 25% до 100% от высоты загнутого конца лопасти. Достигается снижение энергопотребления винта на перемещение плавательного средства. 2 ил.
Формула изобретения RU 2 301 761 C1
Гребной винт с направляющей насадкой, содержащий установленные на ступице осесимметричной формы гребные плоскопрофильные лопасти, одна из двух поверхностей которых рабочая, которые осесимметрично размещены в трубовидной кольцевой полости с зазором между концами лопастей и внутренней стенкой насадки, отличающийся тем, что концы каждой лопасти загнуты под углом α, обеспечивающим параллельность внутренней поверхности насадки с поверхностями загнутых концов, и созданием между этими поверхностями зазора δ в пределах от 1 до 22% от величины диаметра D винта, при этом высота h загнутого конца каждой лопасти относительно рабочей поверхности каждой лопасти составляет от 0,1 до 11% от величины диаметра винта, а радиус R загиба каждого конца лопасти по рабочей поверхности находится в пределах от 25 до 100% от высоты загнутого конца лопасти.
Источник: patenton.ru
Гребной винт Michigan Power PL485-4B DAR 85% 4-х лопастной

Гребной винт Michigan Power PL485-3B DAR 85% 4-х лопастной. Эти гребные винты специально разработаны для более высоких скоростей судна. Они имеют относительно большую поверхность лезвия. Они идеально подходят для высоких мощностей при относительно небольших диаметрах шнеков. В Powerline гребные винты изготовлены из марганцевой бронзы и высших факультетов никеля алюминиевой бронзы.
Возможны поставки в иных диаметрах вала. От шага винта цена не изменяется. За подбором обрпащайтесь к специалистам компании Яхтенные Товары.
Поделиться
Цена действительна только для интернет-магазина и может отличаться от цен в розничных магазинах
- Описание
- Задать вопрос
Гребной винт Michigan Power PL485-3B DAR 85% 4-х лопастной
| Schroefdiameter | Naafdiam.uitwendig OD1хOD2 | Spiebann bxd | Asgat(1:10)Od1хOd2xL |
| 11-279 inch-mm | 37×42 | 6×3 mm | 25x19x60 |
| 12-305 inch-mm | 37×42 | 6×3 mm | 25x19x60 |
| 13-330 inch-mm | 37×42 | 6×3 mm | 25x19x60 |
| 14-356 inch-mm | 37×42 | 6×3 mm | 25x19x60 |
| 15-381 inch-mm | 37×42 | 6×3 mm | 25x19x60 |
| 16-406 inch-mm | 45×52 | 8×4 mm | 30x22x80 |
| 17-432 inch-mm | 45×52 | 8×4 mm | 30x22x80 |
| 18-457 inch-mm | 45×52 | 8×4 mm | 30x22x80 |
| 19-483 inch-mm | 50×57 | 10×4 mm | 35x26x90 |
| 20-508 inch-mm | 50×57 | 10×4 mm | 35x26x90 |
| 21-533 inch-mm | 50×57 | 10×4 mm | 35x26x90 |
| 22-559 inch-mm | 55×64 | 12×5 mm | 40x30x100 |
| 23-584 inch-mm | 55×64 | 12×5 mm | 40x30x100 |
| 24-610 inch-mm | 55×64 | 12×5 mm | 40x30x100 |
| 25-635 inch-mm | 65×75 | 14×5 mm | 45x33x 120 |
| 26-660 inch-mm | 75×84 | 14×5 mm | 45x33x120 |
| 27-686 inch-mm | 75×84 | 14×5 mm | 50x36x140 |
| 28-711 inch-mm | 75×84 | 14×5 mm | 50x36x140 |
| 29-736 inch-mm | 76×102 | 16×5 mm | 60x45x150 |
| 30-762 inch-mm | 76×102 | 16×5 mm | 60x45x150 |
Вы можете задать любой интересующий вас вопрос по товару или работе магазина.
Наши квалифицированные специалисты обязательно вам помогут.
Источник: yacht-parts.ru
В Китае разработали инновационный электромагнитный движитель для подводных лодок

Китайские ВМС проводят испытания новой подводной лодки, оборудованной новым, до сих пор нигде не используемым типом движителя — электромагнитным гребным винтом. Об этом сообщают различные иностранные военно-технические издания.
В частности, издание Globe рассказывает о новом типе движителя, изобретенном в КНР специально для подводных лодок. Rim-Driven Thruster — это пропеллер или гребной винт, но его лопасти прикреплены не к центральной втулке, а к внешней поверхности цилиндра, помещенного в туннель с магнитным кольцом.

Электромагнитное устройство, получая напряжение от внешнего источника питания, создает момент, который заставляет пластины двигаться по или против часовой стрелки. Такой движитель исключает использование большого количества деталей, таких как гребной вал и редукторы и значительно снижает уровень шума при движении объекта.
Вестник Naval Open Source Intelligence пишет, что хотя в настоящее время не сообщается ни об одной подводной лодке, использующей систему RDP, в последнее время появились слухи о том, что Китай применяет двигатель с кольцевым приводом на своей новой атомной подводной лодке типа 095 (китайское обозначение: 09-V класса Chu). «Новая китайская подводная лодка не похожа ни на что в западных военно-морских силах», — утверждает вестник.
«Кажется, мы имеем новую китайскую загадочную подводную лодку. Она заметно меньше, чем существующие типы китайских субмарин, но гораздо бесшумнее существующих аналогов», — пишет The Drive.
Официальных сообщений о разработке новых технологий и типов подводных лодок в Китае пока не поступало. Но если они есть, то флот НОАК совершает действительно мощный технологический прорыв.
Было интересно? Хотите быть в курсе самых интересных событий и новостей? Подписывайтесь на наши каналы в ЯндексДзен и Telegram.
Вы можете сообщить нам свои новости или прислать фотографии и видео событий, очевидцами которых стали, на электронную почту.
Источник: mvf.su