Изобретение относится к области гидроакустики и может быть использовано в качестве гидроакустического вооружения подводных лодок военного назначения, а также при исследованиях Мирового океана.
Гидроакустические комплексы (ГАК) являются основой информационной системы подводных лодок (ПЛ); с помощью ГАК решается комплексная задача наблюдения за подводной обстановкой, включающая обнаружение, определение координат и элементов движения, классификацию различных целей.
В настоящее время сформировалась типовая структура ГАК ПЛ [1-6], включающая системы шумопеленгования с системами шумопеленгования в среднечастотном диапазоне (ШП-СЧ) и в низкочастотном диапазоне (ШП-НЧ), системы гидролокации, обнаружения гидроакустических сигналов, звукоподводной связи, классификации и др. [6]. Функционирование ГАК ПЛ обеспечивают центральная вычислительная система (ЦВС), система отображения, регистрации, документирования и управления, включающая пультовые приборы, системы технической диагностики и электропитания.
Основной системой современных ГАК ПЛ является система шумопеленгования [6], которая работает в пассивном режиме. В системе шумопеленгования имеются акустические антенны и аппаратура предварительной обработки (АПО). Информация, принятая антеннами и прошедшая обработку в АПО, в цифровом формате по общекомплексной шине поступает в центральную вычислительную систему и, пройдя дальнейшую обработку, представляется оператору ГАК или передается во внешние системы.
Наиболее близким аналогом по функциональным и техническим характеристикам к предлагаемому изобретению является система шумопеленгования, описанная в Патенте на полезную модель «Гидроакустический комплекс подводных лодок» [7], которая принята за прототип.
Система шумопеленгования — прототип состоит из подсистем шумопеленгования ШП-СЧ и ШП-НЧ. Система ШП-СЧ содержит первую приемную антенну (А1), расположенную в носовом обтекателе ПЛ, и первую аппаратуру предварительной обработки (АПО1), последовательно соединенную с антенной А1. Подсистема ШП-НЧ содержит вторую приемную антенну (А2), выполненную как гибкая протяженная, буксируемая антенна (ГПБА), через кабель-трос и токосъемник соединенную со второй аппаратурой предварительной обработки (АПО2). Аппаратура предварительной обработки АПО1, АПО2 подсистем ШП-СЧ и ШП-НЧ устройства-прототипа через общую шину соединена с ЦВС гидроакустического комплекса ПЛ.
Система шумопеленгования — прототип при одновременном функционировании ШП-СЧ и ШП-НЧ может осуществлять наблюдение в пассивном режиме за подводной обстановкой и обнаруживать цели.
В то же время система шумопеленгования устройства-прототипа имеет существенные недостатки в части обнаружения низкочастотных источников сигнала:
— сигналы, приходящие с носовых углов обзора, не могут быть обнаружены;
— при обнаружении сигналов имеет место неоднозначность пеленга, т.е. невозможно различить, с какого борта (правый или левый) находится обнаруженный источник сигнала;
— обнаружение сигнала в НЧ-диапазоне возможно только при выпущенной ГПБА.
Задачами предлагаемого изобретения являются:
— расширение сектора обзора в низкочастотном диапазоне до полного, т.е. 360°;
— обеспечение работы в НЧ-диапазоне в носовых углах без выпуска ГПБА;
— ликвидация неоднозначности пеленга на цель в секторах траверсных углов, перекрывающихся с ГПБА и носовой антенны.
Техническими результатами использования изобретения являются:
— формирование полного сектора обзора (360°) при обнаружении источника сигнала (цели) в НЧ-диапазоне;
— возможность обнаружения цели в НЧ-диапазоне в секторе носовых углов без выпуска ГПБА;
— возможность уточнения пеленга на цель, обнаруженной в НЧ-диапазоне подсистемой ШП-НЧ с ГПБА в траверсных секторах обзора.
Для решения поставленных задач в систему шумопеленгования гидроакустического комплекса подводной лодки, содержащую подсистему шумопеленгования в среднечастотном диапазоне (ШП-СЧ), которая включает первую приемную антенну и первую аппаратуру предварительной обработки (АПО1), последовательно соединенную с первой приемной антенной, и подсистему низкочастотного шумопеленгования (ШП-НЧ), включающую вторую приемную антенну, которая выполнена в виде гибкой протяженной буксируемой антенны, через кабель-трос и токосъемное устройство соединенную со второй аппаратурой предварительной обработки (АПО2), при этом АПО1 и АПО2 через общую шину соединены с ЦВС,
введены новые признаки, а именно:
в подсистему ШП-НЧ дополнительно введена третья приемная антенна, выполненная в виде звукопрозрачной цифровой фазированной антенной решетки, расположенной на первой приемной антенне, при этом третья приемная антенна состоит из многоканальных блоков гидроакустических приемников, последовательно соединенных с модулями аппаратуры предварительной обработки (АПО), которые через общую шину соединены с ЦВС, причем модули АПО и многоканальные блоки гидроакустических приемников герметизированы в едином конструктиве.
Введенная третья приемная антенна может иметь сектор обзора более ±90°, что обеспечивает совместно с ГПБА сектор 360°. Кроме того, третья антенна является однонаправленной в отличие от протяженной линейной антенны (ГПБА), которая формирует два максимума, симметрично расположенных относительно оси антенны [6, 8].
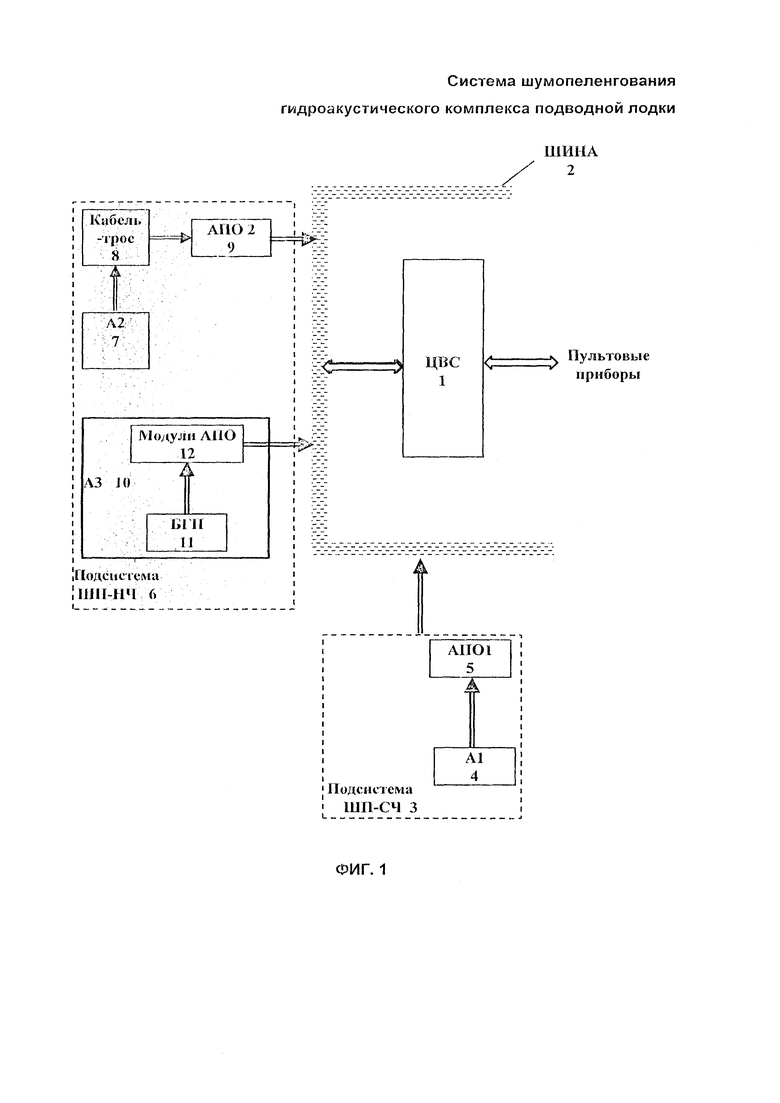
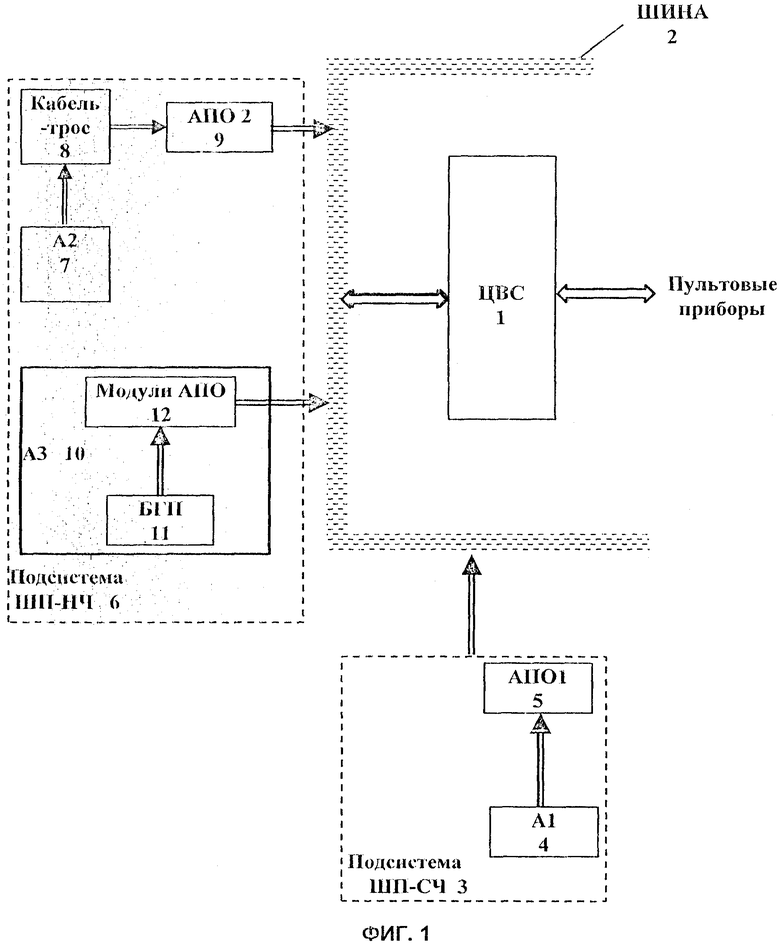
Сущность заявляемого изобретения поясняется фиг. 1, где представлена обобщенная функциональная схема.
Система шумопеленгования состоит из подсистемы ШП-СЧ 3 и подсистемы ШП-НЧ 6. Подсистема ШП-СЧ 3 состоит из первой приемной антенны 4 (А1), являющейся основной носовой антенной, каналы которой соединены с первой аппаратурой предварительной обработки 5 (АПО1).
В подсистему ШП-НЧ 6 входят вторая приемная антенна 7 (А2), которая является гибкой протяженной буксируемой антенной (ГПБА), через кабель-трос 8 и токосъемник (не показан на фиг. 1) соединенная со второй аппаратурой предварительной обработки 7 (АПО2). Также в подсистему ШП-НЧ 6 входит третья приемная антенна 10 (A3), которая является звукопрозрачной цифровой фазированной антенной решеткой и располагается на основной носовой антенне (первая приемная антенна 4). Антенна 10 состоит из многоканальных блоков гидроакустических приемников 11 (БГП) и модулей АПО 12, выполненных в едином конструктиве.
Аппаратура предварительной обработки АПО1, АПО2 и модули АПО антенны A3 10 через шину 2 соединены с центральной вычислительной системой (ЦВС) 1. В ЦВС 1 передаются сигналы управления с пультовых приборов, а сигналы различного типа с ЦВС через общие шины 2 передаются (или принимаются) на все системы ГАК. Обработанная в системах комплекса информация через шины 2 и ЦВС 1 передается на пультовые приборы или во внешние системы (фиг. 1).
Конструктивные и иные характеристики отдельных узлов и элементов, составляющих заявляемую систему шумопеленгования ГАК ПЛ, известны из литературы. Описание структуры ГАК и отдельных подсистем и систем представлено в [6, 9].
Антенны 4, 7, 10 являются приемными и предназначены для преобразования акустических сигналов в электрические. Сведения о конструкциях и типах антенн представлены в [8-10]. В частности, основная носовая антенна А1 представляет собой ферму цилиндрической, квазисферической или иной формы [6, 8, 9].
На этой ферме размещаются гидроакустические приемники, которые соединяются с многоканальной АПО. Многоэлементная антенна A3 может состоять, например, из шланговых модулей, в каждом из которых размещены чувствительные гидроакустические приемники и малогабаритные схемы аппаратуры предварительной обработки [10]. Аналогичные модули с встроенными гидроакустическими приемниками и электронными блоками используются в конструкциях ГПБА [6, 10].
Аппаратура предварительной обработки 5, 9, 12 выполняется на аналого-цифровых средствах. Основные функции АПО — усиление и фильтрация. В зависимости от построения схемы обработки в АПО может быть реализовано преобразование данных из аналогового вида в цифровой [6]. Передача информации от АПО в общую шину осуществляется в цифровом формате по электрическим или волоконно-оптическим линиям связи [1, 4, 6, 7].
Работой ГАК управляют операторы с пультовых приборов. По умолчанию основным режимом работы ГАК ПЛ является приемный, поэтому система шумопеленгования оперативно включена. При этом включенными являются подсистемы ШП-СЧ и ШП-НЧ с антенной A3, размещенной на основной носовой антенне А1. После выпуска антенны А2 (ГПБА) в НЧ-диапазоне дополнительно появляется информация с кормовых секторов, приходящая с антенны А2.
Введение в систему шумопеленгования ГАК новых существенных признаков обеспечивает заявленный технический эффект, связанный с расширением возможностей ГАК и повышением эффективности его функционирования. В частности:
— сектор обзора подводной обстановки на низких частотах (ниже 500 Гц) дополняется до 360° за счет комплектования ГАК носовой звукопрозрачной антенной A3;
— ликвидируется неоднозначность определения пеленга в общих для ГПБА и антенны A3 секторах обзора;
— обеспечивается работа в НЧ-диапазоне в носовых секторах обзора без выпуска ГПБА.
Заявляемое изобретение расширяет технические возможности наблюдения подводной обстановки и может быть использована в качестве системы шумопеленгования ГАК ПЛ различных типов.
1. Патент РФ №2281528. Гидроакустический комплекс подводной лодки. МПК G01S 15/87. Заявл. 13.10.2004, опубл.
10.08.2006, бюлл. 22.
2. Свидетельство на полезную модель №20388. Гидроакустический комплекс подводной лодки. МПК G01S 3/80, G01S 15/00. Заявл. 11.03.2001, опубл.
27.10.2001, бюлл. 30.
3. Свидетельство на полезную модель №24736. Гидроакустический комплекс подводной лодки. МПК G01S 15/00. Заявл. 21.02.2002, опубл. 20.08.2002, бюлл.
23.
4. TSM 2233. Sonar System for Submarine. Проспект фирмы Thomson Marconi Sonar, France.
5. Патент РФ на полезную модель №50004. Гидроакустический комплекс неатомной подводной лодки. МПК G01S 3/80. Заявл. 03.05.2005, опубл.
10.12.2005, бюлл. 34.
6. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб: Наука, 2004.
7. Патент РФ на полезную модель №122494. Гидроакустический комплекс подводной лодки. МПК G01S 3/80. Заявл. 05.07.2012, опубл.
27.11.2012, бюлл. 33 (ПРОТОТИП).
8. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Л.: Судостроение, 1984.
9. Справочник по гидроакустике. Л.: Судостроение, 1988.
10. Патент РФ 2417383. Гибкая протяженная гидроакустическая цифровая кабельная антенна. МПК G01S 7/52. Заявл. 19.02.2010, опубл. 27.04.2011, бюл.
12.
Похожие патенты RU2660377C2
- Касаткин Борис Анатольевич
- Касаткин Сергей Борисович
- Пшихопов Вячеслав Хасанович
- Дорух Игорь Георгиевич
- Гуренко Борис Викторович
- Каришнев Николай Сергеевич
- Войтов Александр Анатольевич
- Дынин Илья Наумович
- Ермоленко Александр Степанович
- Зархин Валерий Иосифович
- Иванов Александр Михайлович
- Островский Дмитрий Борисович
- Полканов Константин Иванович
- Хагабанов Сергей Михайлович
- Хагабанов Сергей Михайлович
- Шейнман Елена Львовна
- Школьников Иосиф Соломонович
- Хагабанов Сергей Михайлович
- Батанов Андрей Константинович
- Батанов Кирилл Андреевич
- Воронов Антон Михайлович
- Кузьмин Александр Андреевич
- Машошин Андрей Иванович
- Цветков Антон Валерьевич
- Кулаженков Михаил Александрович
- Дорохов Анатолий Викторович
- Куприянов Михаил Степанович
- Островский Дмитрий Борисович
- Полканов Константин Иванович
- Антонов Владимир Николаевич
- Егоров Александр Васильевич
- Жиляев Евгений Анатольевич
- Ильин Леонид Иосифович
- Исай Ирина Пантелеймоновна
- Калминский Борис Григорьевич
- Коник Григорий Борисович
- Павлов Валерий Михайлович
- Прошкин Станислав Гаврилович
- Чернядев Евгений Валерьевич
- Ионин В.С.
- Вильнит И.В.
- Гришман Г.Д.
- Дымшиц А.М.
- Ефимов А.В.
- Жиров В.П.
- Корякин Ю.А.
- Кормилицин Ю.Н.
- Смарышев М.Д.
- Смирнов С.А.
- Тазмин Т.Т.
- Хайтин А.А.
Иллюстрации к изобретению RU 2 660 377 C2
Реферат патента 2018 года Система шумопеленгования гидроакустического комплекса подводной лодки
Изобретение относится к гидроакустическим средствам освещения подводной обстановки и предназначена для установки на подводной лодке. Техническими результатами от использования предлагаемой системы шумопеленгования гидроакустического комплекса подводной лодки являются формирование полного сектора обзора (360°) при обнаружении источника сигнала (цели) в НЧ-диапазоне, а также возможности уточнения пеленга на цель, обнаруженной в НЧ-диапазоне подсистемой шумопеленгования с гибкой протяженной буксируемой антенной (ГПБА) в траверсных секторах обзора и обнаружения цели в НЧ-диапазоне в секторе носовых углов без выпуска ГПБА. Для решения поставленных задач в систему шумопеленгования гидроакустического комплекса подводной лодки, содержащую подсистему шумопеленгования в среднечастотном диапазоне (ШП-СЧ), которая включает основную носовую приемную антенну, и подсистему низкочастотного шумопеленгования (ШП-НЧ), включающую ГПБА, в подсистему ШП-НЧ дополнительно введена приемная антенна, выполненная в виде звукопрозрачной цифровой фазированной антенной решетки, расположенной на основной носовой антенне, причем введенная приемная антенна состоит из многоканальных блоков гидроакустических приемников и модулей аппаратуры предварительной обработки, герметизированных в едином конструктиве. 1 ил.
Формула изобретения RU 2 660 377 C2
Система шумопеленгования гидроакустического комплекса подводной лодки, содержащая подсистему шумопеленгования в среднечастотном диапазоне (ШП-СЧ), включающую первую приемную антенну и первую аппаратуру предварительной обработки (АПО1), последовательно соединенную с первой приемной антенной, подсистему низкочастотного шумопеленгования (ШП-НЧ), включающую вторую приемную антенну, которая выполнена в виде гибкой протяженной буксируемой антенны, через кабель-трос и токосъемное устройство соединенную со второй аппаратурой предварительной обработки (АПО2), при этом АПО1 и АПО2 через общую шину соединены с центральной вычислительной системой (ЦВС), отличающаяся тем, что в подсистему ШП-НЧ дополнительно введена третья приемная антенна, выполненная в виде звукопрозрачной цифровой фазированной антенной решетки, расположенной на первой приемной антенне и состоящей из многоканальных блоков гидроакустических приемников с последовательно соединенными модулями аппаратуры предварительной обработки, которые через общую шину соединены с ЦВС, причем модули АПО и многоканальные блоки гидроакустических приемников герметизированы в едином конструктиве.
Источник: patenton.ru
Эсминец: охотник за подводными лодками — как быстро восстановить контакт с гидролокатором
В этом руководстве показано, как быстро восстановить гидролокационный контакт после прохода глубинной бомбы (или в любое время, когда вы по какой-либо причине теряете гидролокационный контакт с подводной лодкой).
Введение
Я видел много сообщений, жалующихся на трудности с потерей подводной лодки после прохода и невозможностью найти их снова с помощью сонара.
Я усовершенствовал метод, который работает каждый раз, и не имеет значения, в каком направлении движется подводная лодка или как она маневрирует. Теперь это то, что работает для меня. Я не говорю, что это единственный способ сделать это, и я уверен, что у ВМС США была своя тактика.
Итак, вот (надеюсь) полезная графика, которую я нарисовал с помощью своих замечательных навыков работы с Microsoft Paint:
Графический пример
(ссылка на большую версию —
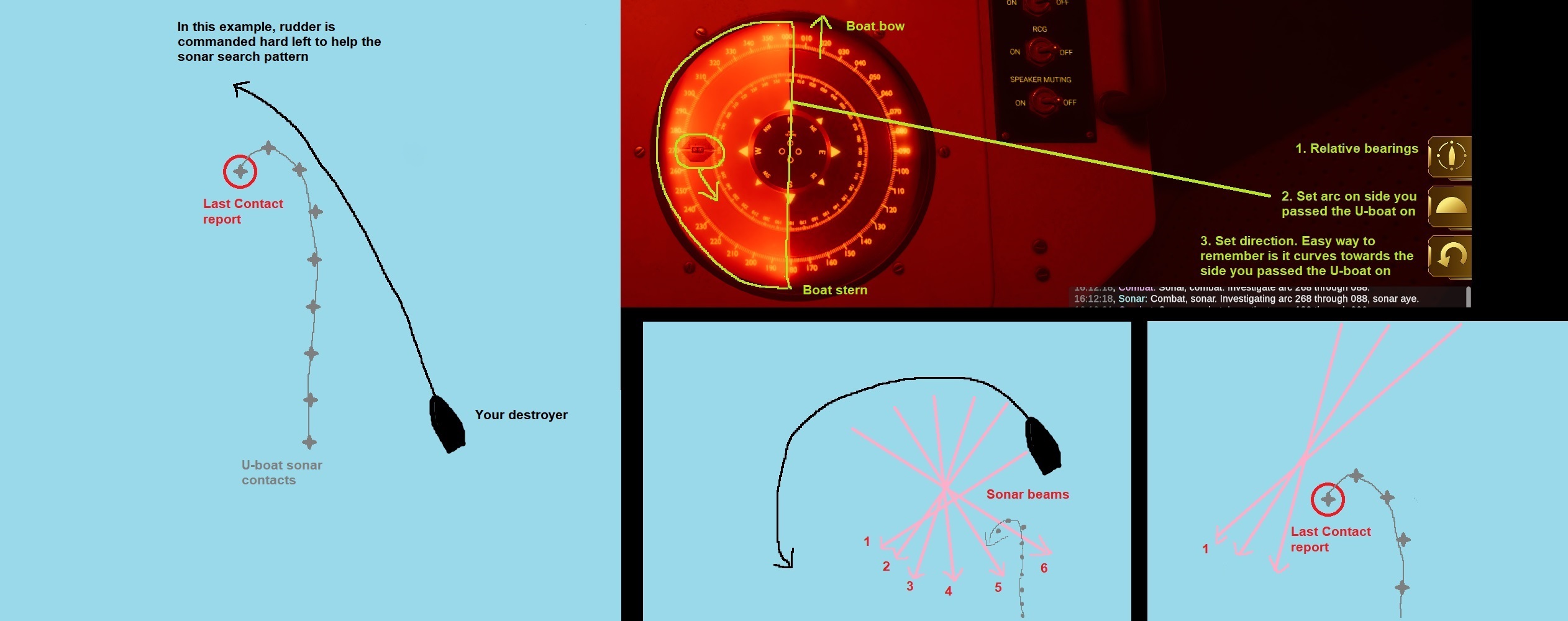
В этом примере ваш эсминец отслеживает подводную лодку с помощью гидролокатора. Подводная лодка движется на север, а вы приближаетесь к ней с задней правой стороны с намерением сделать посадку, когда она продолжит движение на север.
Как известно большинству расстроенных капитанов, он никогда не движется по прямой линии и делает резкий поворот (левый в этом примере), которому вы никогда не сможете следовать, что в конечном итоге приведет к потере контакта с гидролокатором. Что делать?
1. Выберите относительные пеленги сонара.
Установите сонар на относительные пеленги (это одна из первых вещей, которые я делаю, когда начинается миссия).
Почему? Преимущество наличия относительных пеленгов на экране сонара эффективно превращает дисплей сонара в вид вашего корабля сверху вниз. Позиция 12 часов — нос, 6 часов — корма, 9 часов — левый борт, 3 часа — правый борт.
Это позволяет вам быстро установить шаблон поиска сразу же на основе ориентации вашего корабля, вместо того, чтобы определять, по какому курсу вы движетесь, находить этот курс по штурвалу и пытаться установить шаблон поиска.
Не делай этого. Это занимает слишком много времени.
2. Установите дугу сонара
Установите дугу на стороне вашего корабля, по которой вы прошли подводную лодку. Дуга 180 градусов работает лучше всего.
Что такое пеленг: определение, принцип работы, применение

Пеленг – это понятие из области радиотехники и навигации, которое используется для определения направления на объект или источник сигнала. Благодаря пеленгу мы можем определить, откуда приходит радиоволна и в каком направлении находится объект или источник сигнала. Это важная информация для многих областей, включая военные операции, авиацию, спасательные службы и радиолюбителей.
Принцип работы пеленга основан на сравнении сигналов, получаемых от объекта сигнала, приходящего из разных направлений. Обычно для этого используются антенны с узкой диаграммой направленности, которые получают сигналы от объекта на разных углах или азимутах. Затем эти сигналы анализируются и сравниваются, чтобы определить направление на объект или источник сигнала.
Применение пеленга очень широко: от использования в армии для определения местоположения врага, до использования радиолюбителями для поиска и приема сильных радиоволн. В авиации пеленг используется для определения местоположения других самолетов или навигационных радиомаяков. Он также применяется в морском деле для определения местоположения судов и обнаружения других судов или подводных лодок.
Таким образом, пеленг является важным инструментом для определения направления на объект или источник сигнала, и его использование распространено в различных областях. Независимо от цели, пеленг помогает нам получать информацию о направлении и угле на объект, что дает дополнительные возможности и преимущества в различных ситуациях.
Определение пеленга
Пеленг — это направление между двумя объектами, которое используется для определения местоположения и отслеживания объектов, таких как корабли, самолеты, радиостанции и другие.
Определение пеленга основано на принципе измерения угла между наблюдателем и целью. Этот угол может быть измерен с помощью специального прибора, такого как пеленгатор или радар. Результат измерения пеленга представляет собой направление в пространстве от наблюдателя до цели.
Пеленг может быть абсолютным или относительным. В случае абсолютного пеленга измеряется угол между наблюдателем и некоторой точкой, например, между наблюдателем и северным полюсом Земли. Относительный пеленг представляет собой угол между наблюдателем и другим объектом, например, между двумя кораблями.
Определение пеленга широко используется в навигации, радиолокации, радиоориентировании и других областях, где важно определить направление на объект или контролировать его движение.
Принцип работы пеленга
Пеленг – это способ определения направления на объект с помощью измерения угла между направлением на этот объект и опорным направлением. Принцип работы пеленга основан на использовании трех или более измерений углов на объекте для определения его точного положения относительно наблюдателя.
Определение пеленга осуществляется с помощью двух основных компонентов – источника сигнала и приемника. Источником сигнала может быть радиомаяк, судно, самолет, спутник или другой объект, излучающий электромагнитные волны или сигналы. Приемником служит специальное устройство, называемое пеленгометром или радиокомпасом, которое измеряет угол между направлением на объект и опорным направлением.
Принцип работы пеленга заключается в том, что приемник получает сигнал от источника, а затем анализирует его для определения угла между направлением на источник и опорным направлением. Этот угол затем используется для определения точного положения объекта в пространстве.
Для повышения точности измерения пеленга может применяться техника стереопеленгации, основанная на одновременном измерении угла на объекте с помощью двух разнесенных приемников. Это позволяет более точно определить положение объекта и снизить влияние погрешностей.
Принцип работы пеленга может применяться в различных областях, включая навигацию на море, воздушные и космические системы, системы радионаблюдения и др. Он позволяет определять точное положение объектов и контролировать их перемещение с высокой точностью.
Читать еще: Мультистайлер или выпрямитель: какой инструмент выбрать?
Применение пеленга
Пеленг является одним из основных инструментов типичной морской радиостанции и находит широкое применение как в гражданской, так и в военной сфере.
Мореплавание
- Пеленг используется для определения направления на другие суда, берег, острова или другие объекты на море. При этом обычно измеряется магнитный пеленг судна относительно радиостанции или другого источника сигнала.
- Также пеленг применяется для направления судна на определенные навигационные точки, указанные в морских картах или навигационных приложениях.
Военное применение
- Военные суда и подводные лодки используют пеленг для определения направления на вражеские объекты или для обнаружения и локализации потенциально вражеских судов.
- Пеленг также предоставляет возможность для определения источника радиосигнала и его типа, что позволяет судну или лодке судить о намерениях и действиях других судов или противника.
Авиация
- Пеленг применяется в авиации для определения направления на аэропорт, навигационные маяки или другие объекты на земле.
- Также пеленг используется в авиации для ориентации и передачи информации о своем местоположении и направлении другим самолетам или контрольным центрам.
Телекоммуникации
- Пеленг применяется в телекоммуникациях, особенно в радиовещательной сфере, для определения направления на передатчик и настройки антенн на оптимальное приемное или передающее направление.
- Пеленг помогает определить мощность и качество сигнала, а также помогает в идентификации источника радиосигнала.
История пеленга
Пеленг — это способ определения направления на объект или источник сигнала. Это одна из основных задач радионавигации. История пеленга начинается с появления радиосвязи и возникновения необходимости определения положения объектов на земле или в воздухе.
Первые работы по пеленгу проводились в начале XX века. Одним из первых важных достижений в этой области было создание устройства под названием «дирекционная антенна». Она позволяла определить направление на источник радиосигнала с помощью изменения ориентации антенны.
В дальнейшем, с развитием радиосвязи и навигации, идея определения направления при помощи антенны была дальше усовершенствована. Так, был создан прибор под названием «адпромкомплект». Он позволял не только определить направление на источник сигнала, но и прокладывать маршруты геодезических съемок и осуществлять другие задачи связанные с радионавигацией.
Со временем пеленг стал активно применяться в различных областях. Военные используют его для обнаружения и отслеживания вражеских объектов, пилоты — для навигации в воздухе, моряки — для определения направления на другие суда и маяки.
Современные пеленги получили дополнительные функции, такие как определение расстояния до объекта и точности измерения направления. Они устанавливаются на борту летательных аппаратов, судов, в автомобилях и даже использоваться в смартфонах.
Типы пеленгов
Пеленги используются для определения направления на объект и могут быть различных типов. Вот некоторые из них:
- Магнитный пеленг: основан на использовании магнитного компаса для определения направления на объект. Он измеряет угол между направлением на север и объектом.
- Гироскопический пеленг: использует гироскопы для измерения угловой скорости и изменения направления на объект. Он основан на принципе сохранения момента импульса.
- Радиоволновой пеленг: определяет направление на объект путем измерения времени прихода радиосигнала от объекта на различные антенны.
Кроме того, существуют и другие типы пеленгов, такие как оптический пеленг, который использует оптические приборы для измерения угла на объект, и акустический пеленг, который использует звуковые сигналы для определения направления.
В зависимости от конкретной задачи и условий, выбирается соответствующий тип пеленга для получения наиболее точной информации о направлении на объект.
Преимущества использования пеленгов
- Идентификация местоположения Пеленги позволяют точно определить местоположение объекта или сигнала. Это особенно полезно в навигации, поиске и спасательных операциях.
- Отслеживание движения Пеленги позволяют отслеживать движение объекта или сигнала. Это может быть полезно в следующих случаях:
- Наблюдение за движущейся целью;
- Контроль траектории объекта;
- Мониторинг перемещения транспортных средств.
- Обнаружение враждебной атаки;
- Мониторинг риска в зоне бедствия;
- Предупреждение о разрушении или аварии.
- Установка направления при передаче радиосигнала;
- Обнаружение направления источника сигнала для улучшения связи;
- Улучшение качества сети связи.
Читать еще: Луганск: качество сотовой связи и уровень покрытия
Ключевые компоненты пеленга
Пеленг – это способ определения направления объекта относительно наблюдателя. Для этого используются различные компоненты, которые работают вместе для обеспечения точности и надежности пеленгования. Основные ключевые компоненты пеленга включают:
1. Антенна
Антенна – это устройство, которое используется для излучения и приема радиоволн. Она играет важную роль в пеленговании, так как позволяет получить сигнал от объекта и направить его на дальнейшую обработку.
2. Радиоприемник
Радиоприемник – это устройство, которое служит для приема радиосигналов. Он принимает сигнал, полученный антенной, и преобразует его в электрический сигнал, который может быть обработан дальше.
3. Детектор
Детектор – это компонент, который используется для обнаружения объекта на основе радиосигнала. Он анализирует электрический сигнал, полученный от радиоприемника, и определяет наличие объекта, его расстояние и направление.
4. Система обработки данных
Система обработки данных – это компонент, который используется для анализа и интерпретации полученных пеленгов. Он обрабатывает данные, полученные от детектора, и предоставляет информацию о направлении объекта относительно наблюдателя.
5. Дисплей
Дисплей – это устройство, которое выводит информацию о пеленге на экран. Он позволяет наблюдателю увидеть направление объекта и принять соответствующие решения на основе этой информации.
6. Источник питания
Источник питания – это устройство, которое обеспечивает питание всей системы пеленга. Оно может быть внутренним или внешним и обеспечивает энергию, необходимую для работы всех компонентов.
Все эти компоненты взаимодействуют друг с другом, чтобы обеспечить точное определение направления объекта. Без одного из них система пеленга не смогла бы работать корректно.
Методы измерения пеленга
Существуют различные методы измерения пеленга, которые позволяют определить направление на объект относительно наблюдателя. Вот некоторые из них:
Оптический метод
Этот метод основан на использовании оптических приборов, таких как бинокль или телескоп. Наблюдатель смотрит в направлении объекта и использует градусную шкалу на приборе для определения угла между направлением наблюдателя и объектом.
Радиотехнический метод
Для измерения пеленга в радиотехнических системах используются антенны и радиоприемники. Антенна направлена на объект, и с помощью радиоприемника определяется угол прихода сигнала от данного объекта.
Гидроакустический метод
В подводной аккустике измерение пеленга осуществляется с помощью гидроакустических систем. Специальные гидрофоны замеряют выходной сигнал, и с помощью математических алгоритмов определяется угол прихода звука от источника.
Спутниковый метод
Спутниковые системы навигации, такие как GPS, позволяют определить пеленг с использованием сигналов спутников. При помощи специальных приемников и алгоритмов, сигналы с нескольких спутников объединяются для определения направления на себя.
Инерциальный метод
Инерциальные системы измерения пеленга основаны на использовании гироскопов и акселерометров для определения угловой и линейной скорости объекта. Путем интегрирования данных с этих датчиков можно определить пеленг на объект.
Каждый из этих методов имеет свои достоинства и применимость в различных областях, и выбор метода зависит от конкретной задачи и условий проведения измерения пеленга.
Подводные пеленги
Подводные пеленги — это специализированное оборудование, которое используется для определения направления и удаленности подводных объектов.
Принцип работы
Подводные пеленги работают по принципу приема и анализа звуковых сигналов, передаваемых под водой. Для этого используются гидрофоны — устройства, способные зарегистрировать звуковые волны в водной среде.
Подводные пеленги также могут использовать систему из нескольких гидрофонов, расположенных на некотором расстоянии друг от друга, что позволяет удаленно определить местоположение исходного звука.
Применение
Подводные пеленги широко используются в морской и подводной активности. Военные подводные лодки, например, используют пеленги для определения положения противника и планирования тактики действий.
Читать еще: Опросы в Телеграмме для друзей: интересные вопросы и темы для обсуждения
Пеленги также применяются и в гражданских целях. Одним из основных применений является поиск и исследование подводных объектов, таких как рыба, коралловые рифы или потерпевшие крушение суда. Пеленги позволяют обнаружить и установить местоположение этих объектов.
Важным применением подводных пеленгов является также дальнейшая разработка технологий и оборудования для глубоководного исследования и изучения подводной среды.
Спутниковые пеленги
Спутниковые пеленги – это системы, которые используют спутники для определения местоположения объектов на Земле. Они основаны на принципах радионавигации и широко применяются в различных сферах жизни.
Принцип работы
Спутниковым пеленгам необходимо две вещи: спутниковая система, состоящая из спутников и наземных приемников, и GPS-сигналы, которые излучаются спутниками. Когда наземный приемник получает эти сигналы, он анализирует время, которое требуется сигналу, чтобы пройти от спутников до приемника. Зная время, требуемое для распространения сигнала, и зная точное время, передаваемое спутниками, наземный приемник может определить свое местоположение с точностью до нескольких метров.
Применение
Спутниковые пеленги имеют широкий спектр применения в различных отраслях. Например:
- Спутниковая пеленгация используется в автомобильной навигации. Программа GPS-навигации может определить текущее местоположение автомобиля и рассчитать оптимальный маршрут до заданного пункта назначения.
- Спутниковые пеленги применяются в морской навигации. Морские суда могут использовать спутниковые системы для определения своего местоположения и планирования маршрута.
- Спутниковые пеленги используются в геодезии и картографии. Они могут помочь в создании точных карт и измерении земных поверхностей.
- Спутниковая пеленгация применяется в геологии и горнодобывающей промышленности для поиска полезных ископаемых и определения границ месторождений.
Это лишь некоторые из многочисленных примеров применения спутниковых пеленгов. Благодаря своей точности и доступности, эти системы являются неотъемлемой частью современного мира и находят применение во многих сферах жизни.
Развитие технологий пеленга
Технологии пеленга в настоящее время активно развиваются и находят широкое применение в различных областях. Вот несколько направлений развития технологий пеленга:
- Морская навигация: Технология пеленга используется в судовождении для определения направления и удаленности объектов, таких как другие суда, береговые ориентиры или подводные объекты.
- Военное применение: Пеленг может использоваться в военных целях для определения местоположения вражеских объектов, таких как корабли или самолеты.
- Аэронавигация: В авиации пеленг используется для определения направления и удаленности объектов на земле или в воздухе.
- Телекоммуникации: Технология пеленга применяется в радиосвязи и сотовой связи для определения направления источника сигнала.
- Астрономия: Пеленг используется в астрономии для определения координат небесных объектов.
С развитием технологий, пеленг становится точнее и более доступным. Современные приборы позволяют определять направление и удаленность объектов с высокой точностью и в режиме реального времени.
Вместе с тем, развитие технологий пеленга также создает новые вызовы и проблемы, связанные с возможностью подавления или искажения сигналов, а также с защитой конфиденциальной информации. Борьба с такими проблемами требует постоянного совершенствования технологий и разработки новых методов и алгоритмов.
Вопрос-ответ:
Какое определение имеет пеленг?
Пеленг — это измерение направления на некоторый объект относительно точки наблюдения.
Каким принципом работает пеленг?
Пеленг работает по принципу трехотражательной радиолокации: прибор излучает радарный сигнал, который отражается от объекта и возвращается на прибор. Затем прибор измеряет время прохождения сигнала и на основе этой информации определяет направление на объект.
Где применяется пеленг?
Пеленг применяется в различных областях, включая навигацию, геодезию, радиолокацию, астрономию и другие науки и технические отрасли.
Какое оборудование используется для измерения пеленга?
Для измерения пеленга используются специальные приборы, называемые пеленгаторами или радиокомпасами. Они содержат антенну для излучения радарного сигнала и приемника для регистрации отраженного сигнала.
Какими единицами измеряется пеленг?
Пеленг измеряется в градусах или миллирадианах. Градусы чаще используются в астрономии и геодезии, а миллирадианы — в радиолокации и других технических отраслях.
Источник: freewaygrp.ru