Про GPS, просто и без затей — на пальцах.
Раз уж тут вышел спор с Лопатниковым про «релятивистские поправки» в GPS я решил рассказать, как эта система устроена и почему реверансы «ученых-физиков» в сторону «гения всех времен и народов» не ебут простых инженеров, а система работает, несмотря на то, что считается, что без этих поправок часы на земле и на орбите разбегаются на 47 мксек за сутки, что дает «погрешность» в определении координат аж в 11 км.
На 6-ти орбитах на высоте 20,000 км болтается порядка 24-х спутников (плюс-минус) и в каждый момент времени с земли «видно» около 6-ти спутников — кое-где иногда больше, до 12-ти, иногда кое-где меньше.
Упрощая, каждый спутник передает параметры своей орбиты (эфемериды) и время начала передачи в секундах, прошедших с полуночи 5 января 1980 года. Юникс-тайм, практически.
Все, что нужно приемнику — это определить расстояние до спутников и посчитать свои координаты. Зная параметры орбиты, приемник вычисляет положение спутника на орбите в момент передачи с точностью до 0.3 м, а измеряя разницу во времени между началом передачи и приходом сигнала, приемник может определить расстояние до спутника.
Принцип работы GPS и ГЛОНАСС. В чём их разница?
То есть, расстояние до спутника — это время путешествия сигнала со скоростью 300000 км/сек, плюс задержка в каналах приемника, плюс/минус расхождение часов.
Зная расстояние до спутника, приемник вычисляет, что он находится где-то на сфере с центром на спутнике. Это называется pseudo-range — не знаю, как перевести — псевдо-расстояние, наверное.
Упрощая, на листочке бумаги можно нарисовать 3 окружности, пересечение которых даст треугольничек — это зона на плоскости, где находится приемник, по сигналам от 3-х спутников. Понятно, что 4-й спутник даст возможность определить 3-ю координату — высоту над поверхностью.
Теперь, если к измеренным псевдо-расстояниям _одновременно_ добавлять небольшую поправку (а время с точность до секунды мы знаем от спутника), то можно найти такое значение, когда треугольник превратится в «точку».
В результате таких манипуляций можно не только уточнить расстояние, но и откорректировать часы приемника в зависимости уже от точности, шага, «сдвигалки». К слову, современные приемники умеют корректировать время до 10 нсек.
Этот метод замечателен еще и тем, что компенсирует задержки в тракте приемника.
Смотрим дальше. Как спутник передает.
Спутник передает фазомодулированный шумоподобный (spread-spectrum) сигнал на двух несущих частотах, условно названных L1 и L2.
L1 — это 1,575.42 MHz, L2 — 1,227.60 MHz. В L1 передаются две информационных посылки C/A (Coarse and Acquisition code) и P (Precise code).
«P» одновременно дублируется в L2 диапазоне.
Все спутники вещают одновременно и на одной частоте и для того, чтобы выделить сигнал конкретного спутника посылка модулируется псевдослучайной последовательностью.
Как работает GPS | РАЗБОР
Чем она хороша? Её спектр подобен белому шуму, а аппаратно такой генератор очень легко реализуется на сдвиговом регистре, определенные выходы которого суммируются по XOR и результат заводится на вход. В спутниках применен 10-битный регистр, который при _правильном_ выборе выходов дает максимальную длину «случайного» кода в 1023 бита.
Этот код случаен, т.е. последующий бит не зависит от предыдущего, но он и псевдо-случаен, т.к. последовательность повторяется через 1023 бита.
Что, соббсно, и нужно.
Каждому из 24-х спутников присвоена своя псевдо-случайная последовательность, образуемая простой задержкой по времени исходной 1023-битной посылки. Всего GPS определяет 36 таких задержек, а т.к. номер спутника, передаваемый в «навигационном сообщении», 5-ти битовый, то используется только 32 сдвига (кода).
Таким образом, чтобы выделить сигнал конкретного спутника надо стартовать такой же 10-битный сдвиговый регистр-генератор псевдослучайного кода в определенное (номером спутника) время и сложить его по XOR с демодулированным сигналом.
Устройство, выполняющее XOR-сложение сигнала с псевдослучайной последовательностью называется коррелятором.
Понятно, что для определения 3-х мерных координат, корреляторов должно быть минимум 4, а лучше больше, чтобы можно было выбрать спутник «получче».
Тактовая частота корреляторов 1.023 МГц для C/A координат. Для P — 10.23 Мгц и сама псевдослучайная последовательность настолько длинная, что случайна на протяжении недели, а не одной миллисекунды, как для C/A — гражданских применений.
Но это всё были кодировки — сами данные передаются со скоростью 50 бит/сек.
На спутнике установлены атомные часы (отличающиеся большой _стабильностью_) и все тактовые и несущие частоты привязаны к этим часам.
Основная тактовая частота — это частота модуляции P-кодов — 10.23 МГц, тогда L1 — это 154 цикла, а L2 — 120.
Частота модуляции C/A кодов — это 1/10 от P, а бит данных передается за 20 циклов 1023-битовой п-с последовательности.
Синхронность спутниковой системы, т.е. привязка фаз всех частот к одному генератору таким образом, что все начала всего совпадают (фазы несущей, фазы кодо-модуляторов) дает возможность определения псевдо-расстояния по сдвигу фазы несущей.
Приемник может найти «начало секунды» по появлению нецелых циклов из-за задержки в пути.
Т.к. длина волны несущей C/A — 0.19 м, то измеряя фазовый сдвиг до 0.1% можно получить точность порядка 0.2 мм.
Теоретически.
Но спутник то приближается, то удаляется и частота несущей смещается из-за допплеровского эффекта.
Есть еще масса вещей, снижающих точность: измерения орбиты неточны, положение спутника на орбите тоже «приблизительное», сигнал отклоняется в ионосфере, отражается от поверхностей, да и приемник тактируется неточно.
Точность также зависит от положения выбранных спутников — чем они ближе друг к другу — тем хуже. Это «геометрическое размывание точности».
Вот как-то так, про принципы работы системы.
Но где же нам применить «релятивистские поправочки»? Лопатников САМ ничего придумать не смог, лишь невнятно промычал про «релятивистские эффекты», начав вот с такого «пассажа»:
«Но я же вам битым словом объяснил, что релятивистские эффекты имеют отношение прежде всего к часам на спутнике и за сутки накапливает ошибка — без учета релятивистских эффектов — в 11 с лишним КИЛОМЕТРОВ.НИКАКОГО ОТНОЩЕНИЯ это не имеет ни к пседошумовым сигналам, как таковым — а вы походе даже не знаете, что это такое, и зачем применяется, — ни в чистом виде к допплеровскому сдвигу. Это имеет отнощение к тому, КАК ЧАСЫ ХОДЯТ. Вот их сйчас синхронизировали, а через сутки синхронизация ушла на 37.7 микросекунд — это ошибка в 11 километров.
Только полному невеже и тупице это может быть непонятно.»
Из принципов работы системы понятно, что Лопатников здесь несёт _хуйню_ в свойственной ему хамской манере, даже не понимая, что приемник корректирует свои часы каждый раз, вычисляя координаты, а время ему нужно не абсолютное, а лишь интервал.
Приемнику насрать на 47 микросекунд за сутки — это не будильник.
Такую же хуйню несут его коллеги-физики, ссылку на которых он дал, вместо, чтоб самому подумать:
Дядьки рассуждают о сдвиге частоты часов на спутнике «из-за релятивистских эффектов», даже не понимая, что эта частота попросту «неебет».
Как я понимаю, учет «релятивистских поправок» в GPS — это «политкорректность», не несущая технической необходимости, но и не мешающая работе системы.
Источник: sergei-borodin.livejournal.com
Сигналы глобальных навигационных систем
В наши дни в навигации доминируют глобальные навигационные спутниковые системы (ГНСС) второго поколения: GPS, ГЛОНАСС, Galileo и Beidou. Они развиваются и управляются разными странами, но очень похожи по своей структуре, техническим решениям и возможностям.
Каждая из систем содержит несколько десятков спутников, которые движутся по круговым орбитам на высоте около 20 000 км и содержат на своем борту высокостабильные часы. Спутники наблюдаются станциями наземного комплекса управления, что позволяет предсказывать положение спутников и уход их часов с точностью в метры и наносекунды.
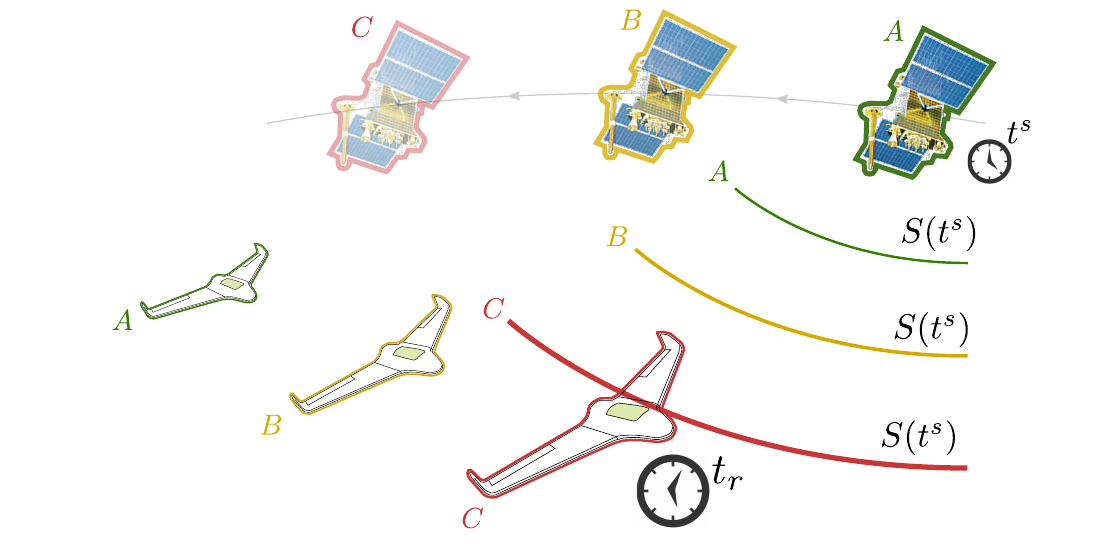
Каждый из спутников излучает навигационный радиосигнал, формируя его в собственной шкале времени:
Сигнал выступает оберткой, физическим носителем показаний часов спутника. Это способ обеспечить «видимость» этих часов за тысячи километров, несмотря на облака, листву и прочие препятствия.
Структура функции S(t) известна и описана в контрольных документах системы. Имея математическую модель сигнала, приемник определяет заложенное в сигнал время и сравнивает его с собственными часами. Разница сигнального времени и часов приемника связана с расстоянием до спутника, а расстояние до спутника — с местоположением приемника. Собрав наблюдения от нескольких спутников, приемник составляет несложную систему уравнений и определяет где он находится.
Навигационный сигнал принимается на фоне шумов, помех и других сигналов. Мощность этих мешающих воздействий в сотни и более раз превышает мощность самого навигационного сигнала. По этой причине обработка сигнала не сводится к взятию обратной функции. Вместо этого приемник создает локальную копию сигнала на основе его математической модели, а затем подстраивает параметры этой копии до максимального совпадения (корреляции).

Алгоритмы обработки навигационных сигналов определяются математической моделью навигационного сигнала. И на этом шаге современные ГНСС преподносят нам сюрприз. Оказывается, что разные системы используют разные сигналы. Более того, каждый спутник не ограничивается одним типом сигнала, а излучает целый набор.
Так на новых спутниках ГЛОНАСС можно выделить до 14 разных навигационных сигналов! А в совокупности по всем системам типов сигналов больше 50.

Если попытаться к радионавигации применить модель OSI, то разные системы и сигналы задают разные протоколы физического уровня. Информативный процесс отражается на физический по немного разным правилам. И если мы хотим построить мультисистемный навигационный приемник, мы должны добавить поддержку всех этих протоколов.
Но не спешите расчехлять ваши IDE. У разных сигналов слишком много общего, поэтому писать независимый код под каждый тип сигнала — плохая идея:
- Поддерживать и тестировать множество реализаций однотипных функций тяжело и дорого, к тому же распухает объем прошивки.
- При сигнальной обработке часть функций реализуется аппаратно (в ПЛИС или модулях СБИС), а значит мы займем кристалл множеством специализированных каналов, потеряем в гибкости настроек.
Что если попробовать другую крайность: обобщить разные сигналы до одной математической модели, а нюансы разных сигналов описывать параметрами этой модели? К такому подходу моя команда пришла после разработки нескольких навигационных приемников. Сейчас мы используем унифицированные каналы, инициализируя их нужными параметрами при старте слежения за тем или иным сигналом.

Модель традиционных сигналов
Положение потребителя оценивается по задержкам сигналов, поэтому навигационные сигналы специально спроектированы так, чтобы упростить оценку этих задержек на фоне шумов и мешающих факторов.
Согласно формуле Вудворда, чем большую полосу занимает сигнал, и чем больше его спектр сосредоточен на краях выделенного диапазона, тем меньше шумовая ошибка оценки задержки его огибающей. Спутник передает навигационные данные (информацию о своем положении и т.п.) с низкой скоростью, что не приводит к существенному расширению спектра сигнала. Поэтому для увеличения точности оценки задержки сигнала его дополнительно модулируют спектрорасширяющей последовательностью.
Пожалуй самые популярные сигналы, которые можно встретить в каждом смартфоне, — это сигналы GPS L1C/A и ГЛОНАСС L1OF. В этих сигналах в качестве спектрорасширяющей последовательности используются дальномерные коды с периодом в 1 мс и длиной 1023 и 511 символов соответственно. Эти последовательности являются псевдослучайными, формируются с помощью линейных генераторов на сдвиговых регистрах. Модель таких традиционных сигналов, как C/A и OF, проста:
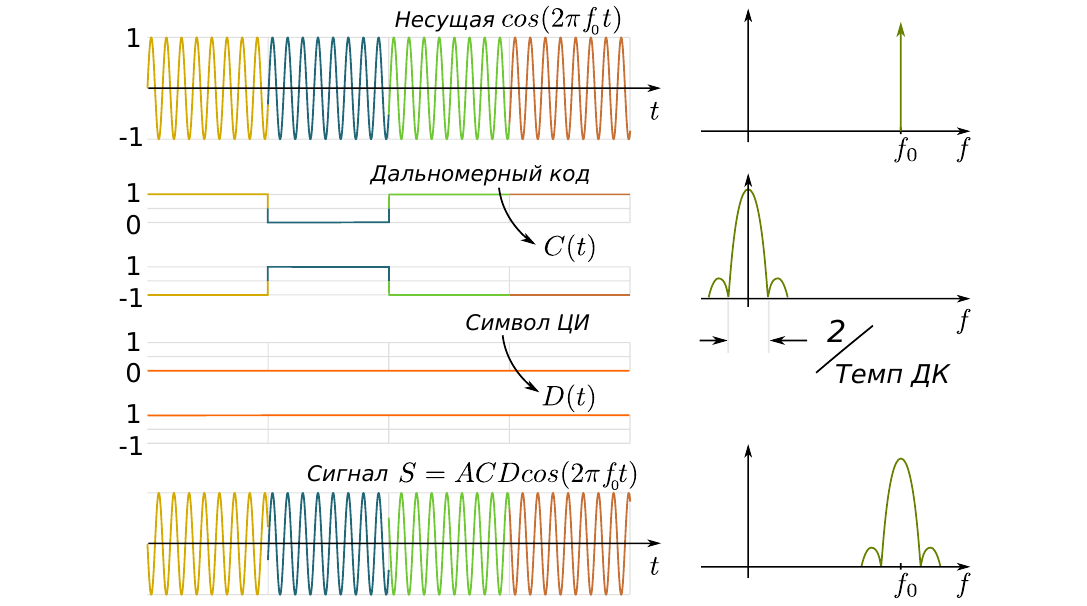
- A = A(t) — амплитуда сигнала, пропорциональная корню из его мощности,
- C = C(t) — модуляция дальномерным кодом, принимает значения +1 и -1, смена значений происходит часто (2 мкс или менее),
- D = D(t) — модуляция символами навигационного сообщения, смена значений происходит редко (2 мс или более), а сами значения заранее не известны приемнику,
- — несущая частота, например, 1575.42 МГц для GPS L1C/A, — начальная фаза.
Обобщаем на новые сигналы
После нескольких десятков лет эксплуатации GPS и ГЛОНАСС с традиционными сигналами встал вопрос о модернизации систем, включая добавление новых сигналов. Задача разработки сигналов возникла и в Galileo с Beidou, создаваемых с нуля. Разработчики стали упражняться в попытках угодить всем потребителям одновременно, героически борясь с конфликтующими требованиями:
- высокая потенциальная точность и низкая ошибка многолучевости;
- простота приемной аппаратуры и низкое энергопотребление;
- минимизация влияния от/на другие радиосистемы;
- постоянство огибающей (высокий КПД усилителя на спутнике) и уплотнение со старыми сигналами;
- использование ранее распределенных под спутниковую навигацию частот;
- чувствительность и помехоустойчивость при большей скорости передачи данных.
Схемы модуляции усложнились. Например, в GPS L2C применили посимвольное уплотнение двух сигнальных компонент, когда они передаются по-очереди: символ от одного, символ от другого. Эта же схема используется в сигналах ГЛОНАСС с кодовым разделением.
В некоторых сигналах применили оверлейные (они же вторичные) коды. С их помощью улучшаются корреляционные свойства сигналов, один сигнал меньше мешает приему другого.
Отдельная хитрость — использование цифровой поднесущей, т.е. умножение сигнала на меандр. Это приводит к расщеплению спектра сигнала, на нем появляются два лепестка. Если использовать новый сигнал на одной несущей со старым, это разнесет их по спектру, и они меньше будут влиять друг на друга. В зависимости от особенностей реализации этот прием называют BOC (binary offset carrier), AltBOC, TMBOC, CBOC, QMBOC и т.д.

Если всё объединить, получаем обобщенную модель навигационного сигнала:
где в дополнение к введенным ранее функциям
- B = B(t) — модуляция цифровой поднесущей, принимает значения +1 и -1, смена значений происходит часто (половина мкс или менее),
- M = M(t) — П-функция размещения во временном слоте, принимает значения +1 и 0 внутри и вне временного слота соответственно, смена значений происходит часто (половина мкс или менее),
- O = O(t) — модуляция оверлейным кодом, принимает значения +1 и -1, смена значений происходит редко (1 мс или более).
Модели сигналов более простой структуры могут быть получены из общей модели путем исключения лишних множителей или приемом их равными единице.
Сигналы системы GPS
Система GPS сменила уже несколько поколений спутников, сейчас продолжают функционировать аппараты от Block IIA до Block III.

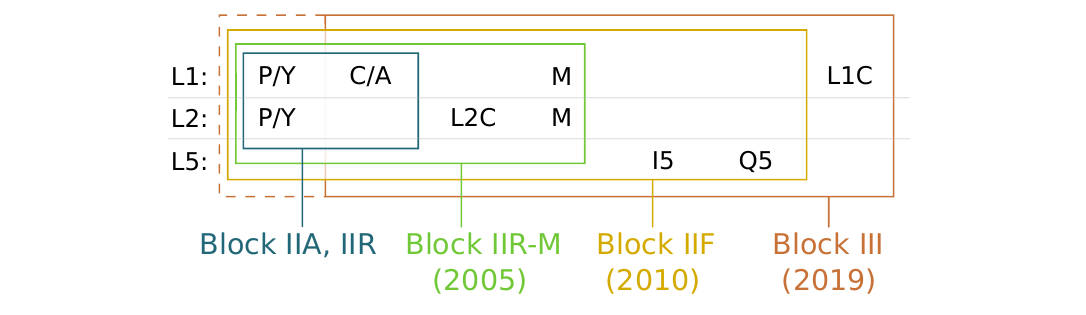
В процессе модернизаций были добавлены гражданские сигналы L2C на второй несущей частоте, военные криптозащищенные M сигналы. С Block IIF начали вводиться сигналы L5 на третьей несущей частоте с полосой 20 МГц, а Block III подарил нам сигналы L1C. Последние со временем могут заменить C/A в наших смартфонах и сделать доступной для гражданских пользователей функцию цифровой подписи для защиты от спуфинговых атак.
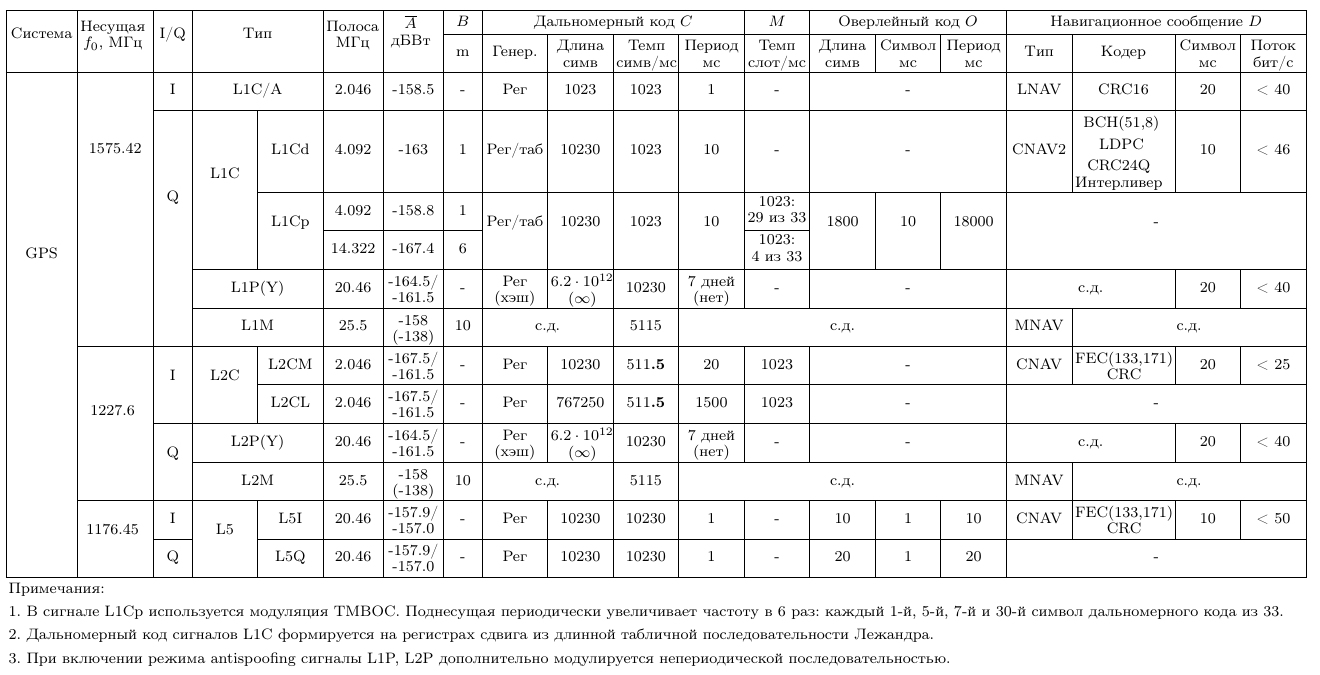
Параметры обобщенной модели для сигналов GPS собраны в таблице (кликните для увеличения):
Сигналы системы ГЛОНАСС
Количество модификаций спутников ГЛОНАСС меньше, чем в GPS. Но по разнообразию заявленных сигналов они не отстают. Основными сигналами остаются традиционные сигналы с частотным разделением, но с выводом новых спутников ГЛОНАСС-К2 мы увидим и новые сигналы с кодовым разделением. А там и BOC модуляция, и временное уплотнение, и прочие изыски.

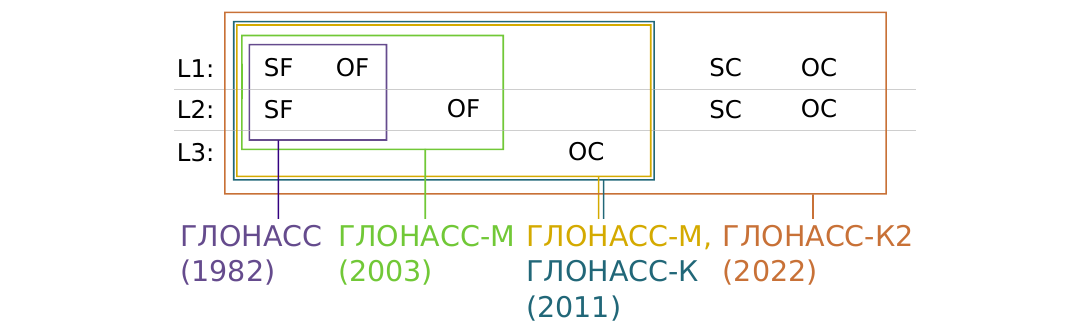
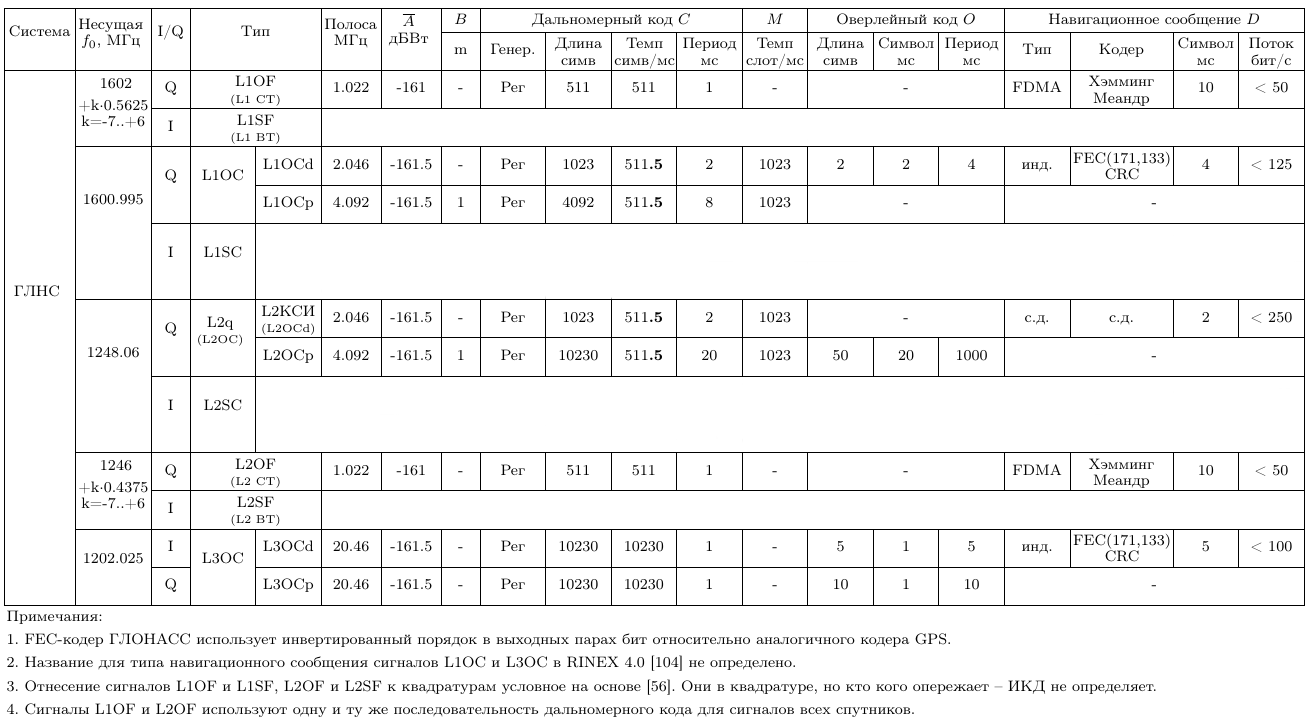
Параметры обобщенной модели для сигналов ГЛОНАСС собраны в таблице (кликните для увеличения):
Сигналы системы Galileo
Галилео изящно вписался в частотный план навигационных систем. Его сигнал E1 по назначению и параметрам близок к L1C GPS и B1C BDS. В тестовом режиме он уже сейчас включает цифровую подпись для защиты от спуфинга. Сигнал E5 использует модуляцию AltBOC и образует самый широкополосный совокупный сигнал из всех существующих, целых 50 МГц.
При разработке системы сигнал E6 предполагался коммерческим, по отдельной подписке. Но несколько лет назад его дальномерные коды были открыты, а на днях опубликована и спецификация сообщения C/NAV.


Параметры обобщенной модели для сигналов Galileo собраны в таблице (кликните для увеличения):

Сигналы системы Beidou
Темпы обновления и развития системы Beidou поражают. Сейчас система находится в третьей фазе, за прошлые 2-3 года спутниковая группировка почти полностью обновлена. Сигналы третьей фазы напоминают сигналы Galileo и хорошо дополняют американскую и европейскую системы.


Параметры обобщенной модели для сигналов Beidou собраны в таблице (кликните для увеличения):

Заключение
При всем разнообразии навигационные сигналы современных ГНСС могут быть приведены к общему описанию, что позволяет унифицировать программные и аппаратные блоки, их обрабатывающие. Эта унификация упрощает разработку и тестирование приемника, подсказывает как выстраивать архитектуру программного обеспечения и какие интерфейсы использовать. Упрощаются аналитические расчеты, их достаточно провести для обобщенной модели, а затем редуцировать до требуемого сигнала.
Приведенное в статье описание является высокоуровневым и не затрагивает реализацию блоков обработки таких сигналов. Кроме того, за бортом остался канальный уровень передачи данных (data link layer) с вопросами синхронизации, декодирования и хранения сообщений. Он тоже требует обобщения, но об этом как-нибудь в другой раз.
- Глобальные системы позиционирования
- Беспроводные технологии
- Производство и разработка электроники
- Электроника для начинающих
Источник: habr.com
Что такое GPS L5 и как он повышает точность GPS?

В течение многих лет в потребительских устройствах для определения местоположения использовались одночастотные GPS-приемники. Но это меняется, поскольку новые гаджеты начали добавлять поддержку второй частоты GPS, называемой L5. Вот все, что вам нужно знать.
GPS-сигнал
Первоначально разработанная для вооруженных сил Соединенных Штатов, Глобальная система позиционирования или GPS теперь играет жизненно важную роль в нашей жизни. От пошаговой навигации до обмена информацией о местоположении для доставки продуктов — мы ежедневно используем GPS. Но долгое время ваш смартфон, автомобильная навигация или смарт-часы использовали устаревшую частоту L1 для получения сигнала GPS и определения своего местоположения.
Программы для Windows, мобильные приложения, игры — ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале — Подписывайтесь:)
L1 широко используется, и он помог значительно изменить мир. Но эта частота подвержена ошибкам многолучевости, которые возникают, когда некоторые сигналы GPS отражаются зданиями, землей и другими объектами, прежде чем достигнуть приемника. Определение местоположения в GPS основано на измерении расстояний до спутников, поэтому эти отражения вызывают проблему, показывая другое расстояние, чем сигнал, который достигает приемника непосредственно со спутника. Сигналы L1 также не очень эффективны при преодолении физических препятствий.
Таким образом, правительство США запустило программу модернизации GPS, чтобы идти в ногу со временем и развитием технологий. В рамках этих усилий по модернизации компания использует три новых сигнала GPS для гражданского использования: L2, L5 и L1C.
L1C все еще находится на стадии разработки и не предоставляет навигационные данные, но сигналы L2 и L5 находятся на разных предоперационных стадиях, и по состоянию на июнь 2022 года больше спутников передают сигнал L2, чем L5. Правительство США стремится улучшить Точность определения местоположения GPS для гражданского использования с этими новыми сигналами.
В то время как сигналы L2 и L5 более мощные, чем сигнал L1, и имеют большую полосу пропускания, L5 является лучшим из трех практически во всем, включая работу с помехами и многолучевыми ошибками. Кроме того, L2 предполагается использовать с сигналом L1 для повышения его точности; сигнал L5 можно интерпретировать независимо.
L5 начал вещание на поддерживаемые спутники в 2014 году, а по состоянию на июнь 2022 года его транслируют 17 спутников GPS. Поскольку любой сигнал GPS, транслируемый менее чем 18-24 спутниками, считается ограниченным, L5 потребуется как минимум еще один запуск спутника, чтобы он стал достаточно полезным. Ожидается, что к 2027 году в небо поднимутся 24 спутника с поддержкой L5.
Почему L5 имеет значение?

Как уже упоминалось, L5 — это самый совершенный сигнал GPS, доступный для гражданского использования. Хотя он в первую очередь предназначен для жизненно важных и высокопроизводительных приложений, таких как помощь в навигации самолета, он доступен для всех, как и сигнал L1. Поэтому производители массовых потребительских устройств, таких как смартфоны, фитнес-трекеры, автомобильные навигационные системы и смарт-часы, интегрируют его в свои устройства, чтобы предложить наилучшие возможности GPS.
Одним из ключевых преимуществ сигнала L5 является то, что он использует радиочастоту 1176,45 МГц, зарезервированную для авиационной навигации во всем мире. Таким образом, ему не нужно беспокоиться о помехах от любого другого радиоволнового трафика на этой частоте, такого как телевизионные передачи, радары и любые наземные навигационные средства.
С данными L5 ваше устройство может получить доступ к более продвинутым методам, чтобы определить, какие сигналы имеют меньшую ошибку, и эффективно определить местоположение. Это особенно полезно в тех местах, где сигнал GPS может быть получен, но сильно ухудшен. В таких ситуациях L5, благодаря своей увеличенной полосе пропускания, может предоставить больше информации, полезной для определения отражений, присутствующих в принимаемом сигнале.
Кроме того, более сильный сигнал L5 обеспечивает лучшее покрытие в густонаселенных городских условиях и помогает устройствам быстро определять местоположение. Наконец, его более низкая частота улучшает прием при использовании внутри помещений.
Таким образом, вы можете ожидать, что устройства, способные принимать сигнал L5, будут предоставлять более точные данные о местоположении, чем устройства с сигналами L1 или L2.
Какие устройства используют сигнал L5?

Производители устройств начали использовать сигнал L5 как часть двухчастотного GPS наряду с сигналом L1. Xiaomi Mi 8 был первым смартфоном, получившим поддержку L5 в 2018 году, но с тех пор на рынке появилось несколько устройств с такой же функцией. Некоторые из популярных устройств, которые, как мы знаем, способны принимать сигнал GPS L5, включают Apple Watch Ultra, портативные GPS-трекеры Garmin GPSMAP 65, 65s и 66sr, телефоны Google Pixel 4, 5 и 6-й серии, а также Samsung Galaxy S22+. , телефоны S21+ и S21 Ultra.
К сожалению, получить один список со всеми устройствами, способными принимать GPS-сигнал L5, невозможно. Но эта открытая база данных в Google Sheets, содержащая информацию из Android-приложения GPSTest, похоже, включает большинство телефонов Android, поддерживающих сигнал L5.
Кроме того, если вам интересно, поддерживает ли ваш телефон Android это или нет, Huawei рекомендует использовать GNSSLogger от Google. Вы можете использовать приложение для сбора данных глобальной навигационной спутниковой системы (GNSS) и определения наличия сигнала L5. Упомянутое ранее приложение GPSTest также часто рекомендуется в качестве одного из вариантов проверки того, поддерживает ли Android-устройство L5.
Другой вариант — обратиться к производителю устройства, чтобы узнать, поддерживает ли конкретное устройство сигнал L5.
Помните, что сигнал L5 требует нового оборудования и не будет работать на старых устройствах, совместимых только с сигналом L1.
Сигналы L5 не ограничиваются GPS
GPS, принадлежащая правительству США, — не единственная глобальная навигационная спутниковая система (GNSS). Это не единственная GNNS, использующая сигнал L5. Китайская BeiDou, европейская Galileo, индийская IRNSS и японская QZSS также передают сигналы на частоте L5. Плюс российский Глонасс планирует к 2025 году запустить спутники, способные транслировать сигнал L5.
Сигналы L5 от этих спутниковых систем могут использоваться многими приемниками GPS, используемыми в устройствах потребительского уровня. Эти приемники с несколькими GNSS могут обеспечить даже более высокую точность определения местоположения, чем те, которые используют только GPS.
Улучшенная точность определения местоположения
Сигнал L5 — долгожданное дополнение к арсеналу GPS. Это может значительно повысить точность определения местоположения на ваших устройствах, ускорить получение блокировки местоположения и даже лучше работать в местах, где устаревший диапазон L1 обычно испытывает трудности. Тем не менее, на момент написания этой статьи правительство США еще не установило достаточно спутников, чтобы официально задействовать сигнал L5, поэтому нам потребуется как минимум пара лет, чтобы воспользоваться всеми его преимуществами.
Программы для Windows, мобильные приложения, игры — ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале — Подписывайтесь:)
Источник: cpab.ru
RU:Accuracy of GPS data
Точность GNSS данных зависит от многих факторов. Например, качество приемника GNSS, положение спутников GNSS в момент регистрации данных, характеристики окружающей среды (здания, лесной покров, долины и т.д.) и даже погода. На этой странице дается основное представление о том, как работает GNSS, и описываются некоторые ключевые вопросы, связанные с точностью.
- 1 Как работает GNSS
- 1.1 GPS
- 2.1 GNSS приемник
- 2.2 Положение спутников
- 2.3 Ваше местоположение
- 2.3.1 Отражения ослабляют сигнал
- 2.3.2 Закрытые помещения
- 3.1 В автомобилях/транспорте
- 3.2 Как узнать что приём хороший?
Как работает GNSS
Раньше термины GNSS (Глобальная навигационная спутниковая система) и GPS (Глобальная система позиционирования) были по сути взаимозаменяемы при обсуждении вопроса о «точности GPS». Система GPS Соединенных Штатов была первой системой GNSS, доступной для потребителей. В последние годы во всем мире появилось множество дополнительных систем GNSS (ГЛОНАСС, QZSS, Бейдоу, Галилео и другие), и многие устройства могут использовать несколько GNSS систем одновременно для расширения покрытия и повышения точности. Учитывая это, в любом современном обсуждении точности этих устройств важно говорить об общей точности GNSS.
GPS
Система глобального позиционирования (GPS) — это спутниковая навигационная система, которая предоставляет информацию о местоположении в любом месте на поверхности Земли или вблизи нее. Она включает в себя несколько спутников на орбите над Землей. Каждый спутник постоянно передает сообщения, которые содержат время передачи сообщения и положение спутника. На земле GPS-модуль получает эти сообщения и, сравнивая время получения сообщения (на внутренних часах) со временем его передачи, выясняет, на каком расстоянии от каждого спутника он находится.
Для расчета своего местоположения GPS-устройство должно принимать сообщения (сигналы) как минимум с четырех спутников. Рассмотрим следующее:
Если модуль GPS принимает сигнал только от «Зеленого» спутника, то он может определить только то, что его местоположение лежит где-то на сфере всех местоположений, которые находятся на одинаковом расстоянии от «Зеленого» спутника (как показано на зеленой сфере на схеме выше).
Теперь рассмотрим случай, когда GPS-навигатор принимает сигналы и с «зеленого», и с «красного» спутника. Как и прежде, он определяет свое расстояние от каждого спутника. Так как мы получили два сигнала, мы можем сузить местоположение до тех точек, где две отдельные сферы расстояния пересекаются. Это означает, что местоположение должно быть где-то на синем круге, как показано на диаграмме.
Факторы, влияющие на точность
Учитывая базовое понимание того, как работает GNSS, в этом разделе описываются некоторые из ключевых вопросов, влияющих на точность исправлений, вносимых GNSS. К ним относятся:
- Характеристики GNSS приемника
- Положение спутников в момент записи.
- Окружающий ландшавт
GNSS приемник
Существует множество GNSS-устройств, которые можно использовать для записи треков. Это специальные GPS логгеры, для смартфонов со встроенной GNSS (многие телефоны просто называют это «GPS»), носимые и автомобильные приемники. Как и следовало ожидать, качество и набор функций используемого GNSS приемника может значительно повлиять на точность записанных треков. Следующие моменты имеют особое значение.
- Системы GNSS, с которыми устройство может работать
Многие современные устройства способны принимать множество систем GNSS одновременно. GPS была первой доступной системой, но сегодня систем много. Сюда входят GPS, GLONASS, Galileo, Beidou, QZSS и так далее. Чем больше систем способно принимать устройство, тем более устойчивым и точным будет определение местоположения и запись трека.
- Диапазоны частот которые может принимать устройство
Исторически сложилось так, что потребительские GNSS-устройства могли принимать сигнал только в так называемой верхнем L-диапазоне частот, в диапазоне 1500 МГц.[1][2] В верхнем L-диапазоне частот GPS имеет сигнал L1, в Galileo — E1, а в GLONASS — G1. Большинство GNSS-приемников, которые могут принимать сигнал только в верхней части диапазона, как правило, имеют максимальную точность около 3 метров. Однако, некоторые новые на рынке GNSS устройства могут использовать новейшие нижней полосы GNSS сигналы, представленные L5 в GPS, G3 в ГЛОНАСС, а также E5a и E5b в Галилео. Эти «более новые» сигналы транслируются в диапазоны 1100-1200 МГц; они легче проникают в материалы и меньше подвержены отражению; кроме того, дополнительный диапазон позволяет корректировать погрешности атмосферы. Возможность приема обоих диапазонов в GNSS-устройстве является огромным преимуществом, а устройства, которые это делают, заявляют точность до 30 сантиметров (а не до 3 метров). Устройства GNSS, которые делают это, почти всегда называют «двухдиапазонными GPS» или «двухдиапазонными GNSS». Если вы планируете использовать устройство для выполнения GNSS/GPX трассировки, покупка двухдиапазонного устройства, если это возможно, предоставит значительные возможности для более высокой точности.
- Антенна
Не всегда очевидно, что для обнаружения сигналов сообщений, поступающих со спутников GNSS, требуется хорошая антенна. Сила сигнала GNSS часто выражается в децибелах, относящихся к одному милливатту (дБм). К моменту когда сигнал ГНСС преодолевает расстояние от спутника в космосе до земной поверхности, сигнал обычно оказывается слабым от -125дБм до -130дБм даже при ясном открытом небе. При застроенных городах или под покровом деревьев сигнал может упасть до -150 дБм (чем больше отрицательное значение, тем слабее сигнал). На этом уровне некоторые GNSS-устройства будут испытывать трудности с получением/фиксацией первоначального сигнала (но, возможно, смогут продолжить слежение, если сигнал был впервые получен на открытом воздухе). Хороший высокочувствительный приемник ГНСС может принимать сигналы до -155 дБм и продолжать слежение до уровней, приближающихся к -165 дБм.
- Количество одновременных каналов приема GNSS
Описано в разделе #GPS выше, 3 видимых GPS спутника, в теории предоставляют все данные, необходимые для вычисления достаточно точного местоположения. На практике, однако, сигналы должны приниматься как минимум с четырех спутников GPS, чтобы исправить ошибки: чем больше, тем лучше. Современные приемники ГНСС имеют достаточно «каналов слежения», чтобы следить за многими спутниками одновременно, и, как правило, это можно сделать у нескольких провайдеров ГНСС. Большее количество одновременных каналов полезно для обеспечения общей точности, сокращения времени, необходимого для получения первоначального определения положения (холодный старт) и снижения энергопотребления. Подробнее смотрите здесь.
- Алгоритмы определения местоположения
Чтобы рассчитать расстояние, на котором GPS-приемник находится от каждого спутника, приемник сначала вычисляет время, за которое этот сигнал прошел в точку приема. Он делает это, принимая разницу между временем, когда сигнал был передан (это время включено в сигнальное сообщение) и временем, когда сигнал был принят (с помощью внутренних часов). Так как сигналы движутся со скоростью света, даже ошибка в 0,001 секунды приравнивается к 300-километровой погрешности вычисленного расстояния! Чтобы снизить этот уровень погрешности, потребуются атомные часы. Однако это не только невыполнимо для потребительских устройств ГНСС, но и сами спутники GPS, в частности, имеют точность всего около 10 нано-секунд (за это время сигнал пройдет 3м). Именно по этой причине требуется минимум четыре спутника. Дополнительный(ые) спутник(и) используется для исправления ошибки. Хотя это редко обсуждается на потребительском уровне, поэтому важно, чтобы ваш приемник ГНСС включал хорошие алгоритмы исправления ошибок.
Положение спутников
Сигналы от различного количества спутников «в поле зрения» для определения вашего положения на Земле
Как отмечалось выше, обычно чем больше спутников используется при расчете вашего положения, тем выше уровень точности. По мере того как спутники системы ГНСС движутся по орбите вокруг Земли, количество спутников, находящихся в поле зрения (в оптимальных условиях), естественным образом колеблется. Это можно увидеть в анимации справа.
Очевидно, что положение спутников полностью находится вне наших рук, однако стоит признать, что это фактор, влияющий на точность. Например, это одна из многих причин, по которой две трека, записанные в разные дни, будут отличаться. Если у вас есть возможность, возможно, стоит записать трек дважды (или более) и усреднить результаты.
Некоторые приемники ГНСС могут отображать количество спутников, находящихся в настоящее время в поле зрения, систему ГНСС, частью которой является данный спутник, и положение спутников на диаграмме радиолокационного типа. На некоторых приемниках это видно в стандартных меню, а на других — в «скрытом» или «отладочном». К сожалению, при наличии сотен приемников GNSS невозможно предоставить документацию по всем устройствам — обратитесь к руководству, которое поставляется вместе с устройством, или попробуйте поискать в Интернете. Приложения для смартфонов с такой функцией «вид со спутника» показаны в таблице характеристик мониторинга как для телефонов на базе iOS, так и Android.
Смотрите также раздел #Проблемы с GPS приемником ниже.
Ваше местоположение
Отражения ослабляют сигнал

Ошибки, вызванные отражениями и затенением под кронами деревьев
GPS требует прямой видимости между приемником и спутниками. Когда объект находиться на линии прямой видимости, точность страдает из-за отражений и ослабления сигналов. Это особенно критично в городской среде, в долинах и на горных склонах. Во всех трех ситуациях объекты (здания и сама Земля) достаточно существенны, чтобы полностью блокировать сигналы GPS.
При приеме слабых сигналов они могут отражаться от зданий и окружающего ландшафта. Отражения генерируют многолучевые сигналы, поступающие на приемник с небольшой задержкой по времени. Это приводит к неточному вычислению позиции.
Даже если объект менее существенный (крона деревьев, крыша автомобиля, ваш тело), отражение и ослабление сигналов все равно может произойти. Иногда это можно наблюдать при просмотре записанных треков поверх аэрофотоснимков. На изображении слева, истинное положение тропинки следует за теневой областью в лесу. Однако, когда GPS-приемник входит в лес (идет с востока на запад), можно заметить, что отражения вызывают неправильное смещение записанного трека на юг.
При ношении GPS-устройства, как правило, чем выше фиксированная антенна, тем лучше прием. В хорошем положении находится плечевой ремень или верхний карман рюкзака, установленный поверх велосипедного шлема, или антенна на крыше автомобиля.
Закрытые помещения

Сгруппированные спутники могут давать большие ошибки.

Равномерно рапределенные спутники повышают точность.
Находясь в замкнутом пространстве, например, в долине с высокими горами со всех сторон или в городе, в окружении высотных домов, уменьшается площадь неба, видимая GPS-приемнику. Это вызывает две проблемы. Во-первых, это уменьшает количество спутников, которые находятся в прямой линии от места расположения приемника, тем самым нарушая правило «чем больше, тем лучше», описанное выше. Во-вторых, это не позволяет GPS-устройству получать GPS-сигналы от рассеянного набора спутников — то есть, спутники, используемые для вычисления вашего местоположения, группируются в небольшой области неба.
Сгруппированные спутники могут привести к большим ошибкам позиционирования, вплоть до нескольких сотен метров. Хотя мало что можно сделать для улучшения ситуации в замкнутом пространстве, стоит следить за GPS-устройством, чтобы быть в курсе, когда качество сигнала падает. Ищите диаграмму «вид со спутника» (как показано на изображениях справа) на вашем устройстве.
Для получения дополнительной информации, или если ваше устройство также сообщает «DOP-значение», вы можете прочитать wikipedia:DOP.
Проблемы с GPS приемником
В автомобилях/транспорте
Если вы планируете записать трек с транспортного средства, перед началом поездки получите устойчивое определение позиции под открытым небом. Это особенно важно для поездов, где вы можете никогда не определить позицию, если включите приёмник в самом вагоне.
Как узнать что приём хороший?
3D fix не является критерием качества определения позиции. Для контроля точности определения местоположения используйте PDOP (снижение точности позиции). Если он выше 6 — у вас плохой прием, и его нельзя использовать для записи треков. Ниже 4, это достаточно хорошо для отслеживания OSM. Менее 2 означает, что у вас очень качественное решение.
Значение DOP зависит от способности GPS корректировать сигнал спутника, который обычно зависит от расположения спутников.
Смотрите также
- Reliability of OSM coordinates
- Test the accuracy of GPS devices
- Precision of coordinates
- RU:GPS Dead Zone – отчёт о проблемах в конкретной области
Внешние ссылки
Источник: wiki.openstreetmap.org
GPS: основые понятия и термины
Начиная с 60-х годов XX века вооруженные, военно-морские и военно-воздушные силы США независимо друг от друга проводили работы над созданием радионавигационных систем, позволяющих независимо от погодных условий круглосуточно точно определять координаты объектов на Земле.
В 1973 году данные программы объединили в одну, и военно-воздушные силы США назначили руководящими в разработке системы. Это стало началом истории построения системы NAVSTAR (Navigation Satellite Timing and Ranging) — глобальной системы местоопределения (Global Positioning System). С 1983 года, после того, как к ее информации получили доступ гражданские лица, а в 1991 году были сняты ограничения на продажу GPS-оборудования в страны бывшего СССР, распространение получила широко известная аббревиатура GPS.
Изначально планировалось, что система будет служить для высокоточного наведения боевых ракет, а навигационные функции системы были отодвинуты на второй план.
Первый спутник системы был запущен в 1978 году, а основная часть спутников системы были запущены на орбиты в середине 80-х годов. В 1994-м на орбиту был помещен спутник, позволивший завершить построение системы из 24 спутников.
Период нахождения спутника на орбите примерно равен 10 годам. Отработавшие свой срок спутники планомерно выводят из системы и утилизируют.
В России действует аналогичная система спутниковой навигации ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система), принцип работы которой во многом подобен GPS, точность определения координат которой, однако, заметно меньше.
Спутниковые радионавигационные системы — это всепогодные системы космического базирования. Они позволяют определять текущие местоположения подвижных объектов и их скорость, а также осуществлять точную координацию времени.
В состав системы входят:
- созвездие ИСЗ (космический сегмент);
- сеть наземных станций слежения и управления (сегмент управления);
- GPS-приемники (аппаратура потребителей).
Космический сегмент (орбитальная группировка) системы GPS на данный момент содержит 24 спутника. У каждого спутника имеется порядковый номер (PRN), всего номеров зарезервировано 32. По состоянию на 27 декабря 2005 года, на орбите находилось 29 рабочих спутников, 5 из которых либо уже отработали свой срок, либо готовились к вводу в систему для замены отработавших.
Период обращения одного спутника составляет 11 часов 56,9 минут. Вес каждого спутника около 835 кг, линейный размер более 5 м (с развернутыми солнечными батареями). На борту каждого спутника установлены атомные часы, обеспечивающие точность 10 9 (0,000000001) с, вычислительно-кодирующее устройство и передатчик мощностью 50 Вт. Спутники размещены на 6 орбитальных плоскостях.
Высота орбит примерно равна 20 200 км, угол наклона орбит составляет 55 градусов (рис. 1).

Передающая аппаратура излучает синусоидальные сигналы на двух частотах: L1 = 1575,42 МГц и L2 = 1227,60 МГц. Перед этим сигналы модулируются псевдослучайными цифровыми последовательностями (эта процедура называется фазовой манипуляцией).
Причем частота L1 модулируется двумя видами кодов: C/A-кодом (код свободного доступа) и P-кодом (код санкционированного доступа), а частота L2 — только P-кодом. Кроме того, обе несущие частоты дополнительно кодируются навигационным сообщением, в котором содержатся данные об орбитах ИСЗ, информация о параметрах атмосферы, поправки системного времени. Частота L1 предназначена для широкого круга гражданских потребителей, а доступ к сигналам частоты L2 в основном получают военные и федеральные службы США. Точность автономного определения расстояния по P-коду примерно на порядок выше, чем по C/A-коду.
Данные параметры расположения группировки космических аппаратов выбраны не случайно. В любой момент времени в любой точке земного шара можно получить сигналы как минимум от 3-х спутников, что является необходимым условием определения координат. Для более точного определения местоположения необходим сигнал от четвертого спутника.
Наземный сегмент системы представляют контролирующе-измерительные станции для мониторинга спутников. Они расположены на Кваджалейне, на острове Вознесения, на Гавайях, Диего-Гарсия и Колорадо-Спрингс. Также в системе работают три наземные антенны (остров Вознесения, Диего-Гарсия и Кваджалейн). Управление осуществляется на центральной станции, расположенной на авиабазе в Шривере, Колорадо (Schriever Air Force Base, Colorado).
Приемные устройства — GPS-навигаторы — работают в комплексе со спутниками. GPS-навигатор получает со спутников следующую информацию: «псевдослучайный код» (PRN — pseudo-random code), «эфемериды» (ephimeris) и «альманах» (almanach).
По наличию этих данных в GPS-навигаторах определяют вид старта или, по-другому, инициализации (под стартом подразумевается начало процесса получения данных хотя бы с 3 спутников, что достаточно для 2D-навигации). Каждый спутник передает только собственную эфемериду, в то время как альманах передается каждым спутником обо всех спутниках сразу.
Стартовать приемник может в разных режимах. «Холодный старт» происходит в том случае, когда информация об альманахе и эфемеридах сильно устарела. Данные могут утеряться в случае переноса GPS-приемника на большое расстояние, или же если часы приемника сбились.
Как правило, «холодный старт» занимает от нескольких до 45 минут. «Теплый старт» — альманах сохранился, но эфемериды уже потеряны и часы приемника еще «знают» точное время. Такой старт занимает меньше времени, от 30 секунд до 10–15 минут, в зависимости от условий приема. В этом случае GPS-приемнику необходимо получить данные только эфемерид. И, наконец, самый быстрый старт — «горячий». Занимает от нескольких секунд до 5 минут. «Горячий старт» может быть осуществлен, когда в навигаторе имеется и альманах, и эфемериды.
Таким образом, большей частью время между включением и началом выдачи координат зависит от того, как давно было выключено устройство, а также от чувствительности прибора; модель приемника влияет на скорость захвата спутников в меньшей степени.
Функционирование аппаратуры потребителя можно понять из обобщенной схемы (рис. 2).

Основное сообщение, передаваемое с каждого навигационного спутника GPS, формируется в виде кадра. Поток навигационных данных передается со скоростью 50 бит/с. Длительность информационного символа «0» или «1» равна 20 мс. Кадр состоит из пяти под-кадров, причем четвертый и пятый подкадры разделены на 25 страниц каждый. Подкадры с первого по третий, а также каждая страница четвертого и пятого подкадров содержат по 300 символов, которые разделены на 10 слов по 30 символов в слове.
В таблице 1 показана информация, передаваемая с навигационного спутника.
Таблица 1. Информация, передаваемая со спутника.

Альманах, содержащий информацию о параметрах орбит каждого из спутников системы, приведен в таблице 2.
Таблица 2. Данные альманаха спутника 01.

Нулевой отсчет времени GPS определен в полночь с 5 на 6 января 1980 года. Неделя является самой большой единицей измерения времени в системе GPS. Неделя определена как 604 800 с.
Эфемериды представляют собой уточненные параметры движения спутников. Основываясь на данных альманаха, GPS-приемник «сканирует» небо и при получении данных от спутника уточняет его эфемериды.

Рис. 3. Расположение спутников на информационном экране навигатора
Чтобы понять, как GPS-навигатор определяет координаты, необходимо иметь представление о системе координат, в которой происходит движение спутников и определение координат конечных потребителей.
Наблюдатель на Земле может представить небесную сферу, спроецированную на плоскость так, чтобы центр совпадал с местоположением наблюдателя.
Именно в этой проекции пользователю GPS-навигатором показывается примерное расположение спутников (рис. 3).
Как видно из рисунка (снимок с экрана GPS-навигатора), спутников в пределах видимости находится девять (снимок производился при включенном режиме симуляции, то есть когда навигатор не ловит сигналы со спутников, а моделирует возможные ситуации). В реальности спутников на проекции сферы видно не более восьми, а сигналы принимаются максимум с четырех-шести. Закрашенный столбик над номером спутника показывает на устойчивый прием сигналов, а высота столбца позволяет оценить качество приема. В момент, когда GPS-навигатор начинает получать информацию со спутника, над его номером появляется незакрашенный прямоугольник. Закрашивается он при уточнении параметров орбиты спутника и начале получения данных, на основе которых идет непосредственный расчет координат пользователя.
Данные спутниковых систем и параметры орбит спутников рассчитываются относительно центра масс Земли. В бытовых GPS-навигаторах используется единая система координат, наиболее популярная в системах гражданской авиации, WGS-84.
Глобальная система координат WGS–84 определена следующим образом.
Начало координат 0 расположено в центре массы Земли;
- ось 0Х — пересечение плоскости исходного меридиана WGS–84 и плоскости экватора;
- ось 0Z — направлена на Северный полюс Земли;
- ось 0У — дополняет систему до правой системы координат.
Исходный меридиан WGS–84 совпадает с нулевым меридианом, определенным Международным бюро времени (BIN).
При наличии сигнала от одного спутника (№1), известной скорости распространения электромагнитного сигнала в пространстве (300 000 км/с) и времени, за которое сигнал дошел от спутника до GPS-приемника, стало возможным рассчитать геометрическое место точек нахождения приемника сигнала (им будет являться сфера с радиусом, равным расстоянию от спутника до приемника, в центре которой находится спутник).
Если GPS-навигатор начал принимать сигналы от второго спутника, то аналогично первому случаю, строится сфера вокруг спутника №2. Так как GPS-приемник должен находиться на обеих сферах сразу, то теперь строим пересечение двух сфер. Каждая точка получившейся окружности может являться местом нахождения приемника в пространстве.
Наконец, когда приемник поймает сигнал от спутника №3, строится еще одна сфера, при пересечении с окружностью она дает нам две точки. Одна из этих точек, как правило, имеет довольно неправдоподобное расположение, и в процессе вычисления по алгоритму она отбрасывается. Таким образом, мы получаем результат: широту и долготу.
Но если учитывать огромную скорость распространения электромагнитной волны, ошибка в расчетах на тысячные доли секунды может привести к довольно серьезным погрешностям в вычислении расстояния до спутника, а затем и в построении сфер и определении координат. Таким образом, мы подобрались к одному важному нюансу — для корректного определения координат необходим четвертый спутник.
После построения трех сфер приемник начинает манипулировать с временной задержкой. При каждом новом сдвиге времени приемника строятся новые сферы, точка пересечения их «расплывается» в треугольник. То есть сферы перестают пересекаться, а местоположение GPS-приемника может с определенной вероятностью быть в любой из точек треугольной области.
Затем временные сдвиги продолжаются до тех пор, пока все три сферы снова не пересекутся в одной точке. Получаем довольно точные координаты. И чем больше спутников «видит» навигатор, тем точнее мы можем скорректировать время с вытекающим из этого увеличением точности позиционирования. При наличии четвертого спутника начинает работать так называемая 3D-навигация, и мы имеем возможность определить высоту над уровнем моря, скорость передвижения по поверхности и скорость вертикального перемещения.
Немного о точности. При создании системы в нее специально внесли так называемый режим S/A (Selective Availability — ограниченный доступ). Этот режим разработан для того, чтобы не дать возможному противнику тактического преимущества в определении местоположения с помощью GPS. Принцип действия данного режима заключается в искусственном рассогласовании часов спутника и приемника.
Поэтому даже при хорошем приеме сигналов нескольких спутников точность не превышала 100 метров. Однако в 2000 году данный режим был отменен, и официально система GPS стала давать возможность определять координаты более точно. Как правило, указывают точность в 20…30 метров. Если использовать специальные алгоритмы пост-обработки, точность можно повысить вплоть до нескольких миллиметров, но это умеют делать геодезические системы. Для работы с такими системами нужен сертификат и разрешение, а их стоимость превышает стоимость бытовых навигаторов в десятки раз.
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
- Неточное определение времени. Вносит погрешность порядка 1 метра.
- Погрешности вычисления орбит спутников (уточнения эфемерид). Вносят погрешность порядка 1 метра.
- Ионосферные задержки сигнала. Вносят погрешность до 10 метров.
- Многолучевое отражение от высоких зданий, других объектов. Вносит погрешность до 2 метров.
- Геометрическое расположение спутников.
- Тропосферные задержки сигнала.
- Лекции доктора технических наук Валерия Викторовича Конина. http://www.kvantn.com.ua/resourse/All/lections/lect_cont.html /ссылка утрачена/
- Информация с сайта http://www.datalogger.ru/gps/ /ссылка утрачена/
- Информация с сайта http://www.ixbt.com/mobile/gps.html
- Информация на форуме сайта http://www.gpsinfo.ru/ /ссылка утрачена/
- Информация с сайта http://www.minsvyaz.ru.
Источник: wireless-e.ru