— САР – локальные системы автоматического регулирования.
В АСУП объектом управления является предприятие; в АСУ ТП – технологический процесс; в локальных САР – механизм, машина или технологический аппарат.
Управление химическим предприятием осуществляется по многоуровневому иерархическому принципу.
На нижнем уровне иерархии находятся локальные САР, которые регулируют отдельные технологические параметры. Локальные САР входят в состав АСУ ТП.
Локальная САР состоит из объекта управления (ОУ) и управляющего устройства (УУ), которые взаимодействуют между собой. При нормальном протекании процесса технологические параметры объекта имеют номинальные значения. Возмущающие воздействия могут изменять технологические параметры, выводя объект из установленного регламентом режима. Цель работы управляющего устройства – поддержание определенных технологических параметров на заданном уровне.
АСУ ТП находится на более высоком уровне иерархии. На этом уровне управления решаются задачи отыскания оптимальных режимов совместно работающих технологических аппаратов, распределения нагрузки между отдельными технологическими аппаратами с применением управляющих ЭВМ.
Следующий уровень иерархии представляют АСУП. На этом этапе решаются не только задачи управления химико-технологическими процессами, но и экономические задачи. Управление осуществляется с применением управляющих ЭВМ.
Основные принципы автоматического управления.
Принято различать три фундаментальных принципа управления: принцип разомкнутого управления, принцип компенсации и принцип обратной связи.
2.2.1. Разомкнутое управление (управление по задающему воздействию)
Рис. 2.1. Управление по задающему воздействию.
Такие САУ осуществляют управление только по задающему воздействию y0(t). Такое управление называют жестким, т.к. при этом не учитываются действительные значения управляемой величины y(t) и возмущающего воздействия f(t). Подобные САУ дают удовлетворительное качество управления лишь при высокой стабильности параметров САУ и внешней среды и при невысоких требованиях к точности. По структуре такие САУ являются разомкнутыми, т.к. не имеют обратной связи по управляемому параметру y(t) и не образуют замкнутого контура управления.
2.2.2. Принцип компенсации (управление по возмущающему воздействию)
В системе управления по возмущающему воздействию кроме информации о цели управления используется информация о возмущающих воздействиях. Одна из задач управляющего устройства при этом заключается в формировании такого управляющего воздействия, которое компенсировало бы влияние на объект управления измеренного возмущения. Поэтому такой принцип управления называется принципом компенсации.
Рис. 2.2. Управление по возмущающему воздействию.
Управление по возмущению основано на принципе компенсации возмущения. Управляемый параметр не измеряется, а используется информация о внешнем воздействии f(t). При этом сначала определяют, какое возмущающее воздействие является основным, а затем устанавливают, как необходимо менять значение управляемого параметра при изменении данного возмущения, для того чтобы значение его поддерживать постоянным.
Рис. 2.3. Пример регулирования температуры в химическом реакторе.
Рассмотрим систему автоматического регулирования температуры реакционной смеси в реакторе (рис. 2.3), основанную на принципе компенсации. Предположим, что основным возмущающим воздействием является расход компонента А. При изменении расхода Fа регулятор 2 формирует управляющее воздействие (изменяет расход хладагента Fохл), не дожидаясь изменения управляемого параметра (температуры).
Что характерно для управления по возмущающему воздействию?
1. Это управление без обратной связи, что означает отсутствие информации об управляемом параметре.
2. Необходимо точно и верно выбрать канал, по которому может проявиться главное возмущающее воздействие.
Достоинства такого принципа управления:
а) быстродействие, так как возмущающее воздействие может быть скомпенсировано до появления рассогласования между текущим значением регулируемого параметра и его заданным значением;
б) возможность (теоретическая) полной компенсации
Достоинством принципа компенсации является быстрота реакции на возмущение. Недостаток – в случае преобладания неконтролируемых возмущений этот способ не дает требуемой точности.
2.2.3. Принцип обратной связи
Рис. 2.4. Управление по отклонению.
Наибольшее распространение получил принцип обратной связи. Здесь управляющие воздействие корректируется в зависимости от выходной величины y(t) и уже не важно, какое возмущение действует на объект. Если значение y(t) отклоняется от заданного значения, то происходит корректировка сигнала y(t) с целью уменьшение этого отклонения.
Рис. 2.4. Система автоматического регулирования.
Частным случаем САУ, работающих по принципу обратной связи, является система автоматического регулирования, представленная на рис. 2.4. Здесь Р – регулятор, на вход которого поступает отклонение . Если то регулятор не формирует управляющего воздействия. В случае, когда ε ≠ 0, вырабатывается управляющее воздействие u(t), направленное в сторону уменьшения сигнала рассогласования.
При этом регулятор стремится компенсировать отклонение независимо от причин, вызвавших это отклонение. Такое управление можно назвать гибким, т.к. при этом учитывается действительное состояние объекта управления.
В качестве примера рассмотрим САР уровня воды в баке. (рис.2.5).
Рис. 2.5. САР уровня воды в баке.
Источник: mydocx.ru
Системы автоматики. Виды и особенности применения

Отрасль техники и науки, которая объединяет теорию и методы проектирования системы автоматики, и устройств, способных выполнять свою основную работу без человека, называется автоматикой.
Классификация и особенности применения
По назначению и характеру выполняемых работ системы автоматики разделяют:
- Системы автоматического контроля служат для контроля некоторого процесса, и включают в себя датчик, усилитель, который принимает сигнал, элемент Р, реализующий последнюю операцию контроля – преобразование результата в удобной форме. Исполнительным элементом может выступать звуковой сигнал, любое другое сигнализирующее устройство ( системы сигнализации ) .
В автоматическую систему контроля входят распределители, блоки питания, стабилизаторы и другие компоненты. Независимо от числа компонентов такие системы разомкнутые, а сигнал идет в одном направлении: от контролируемого объекта Е к исполнительному компоненту Р.
- Системы автоматического управления служат для управления некоторым техпроцессом, используются для автоматизации процессов запуска, регулировки скорости вращения и реверса электромоторов в приводах механизмов.
Одной из разновидности этой системы является система автоматической защиты. Она предотвращает наступление предельного и аварийного режимов, прекращая в необходимый момент работу. - Системы автоматического регулирования удерживают регулируемый параметр в определенных пределах. Это является наиболее сложной автоматической системой, которая объединяет в себе управление и осуществление контроля. Одним из компонентов систем является регулятор.
При выполнении этой системой всего одной задачи по поддержанию постоянного значения параметра, они называются системами стабилизации. Имеются процессы, нуждающиеся в изменении параметра по времени. Такие системы получили название систем программного регулирования.
Для создания стабильности регулируемого параметра применяют различные принципы и методы работы.
При регулировке по отклонению элемент UN сравнивает действительное напряжение Uф с заданной величиной Uз, определяемой элементом ЕN. После этого на выходе UN возникает сигнал ΔU = Uз-Uф, который прямо зависит от отклонения напряжения. Сигнал протекает через усилитель А, далее идет на рабочий орган L. Из-за колебания напряжения на обмотке, изменяется действительное напряжение генератора, который изменяет его отклонение.

Усилитель, который не меняет принцип работы системы, нужен для ее реализации, в то время, когда не хватает мощности сигнала для действия на рабочий орган.
Вместе с задающим действием на систему влияют факторы, образующие отклонения регулируемого параметра. Изменение температуры внешней среды изменяет сопротивление в схеме обмотки возбуждения. Это оказывает влияние на напряжение генератора. Независимо от того, где будут возникать действия Q, система регулирования среагирует на возникшее отклонение регулируемого параметра.
Регулирование по возмущению нуждается в специальных компонентах, которые измеряют действие Q и влияют на рабочий орган. В системе, действующей по такому принципу, значение регулируемого параметра не берется в расчет. Учитывают только нагрузочный ток Iн. Изменение магнитодвижущей силы возбуждающей обмотки, которая является измерительным компонентом системы, происходит при изменении нагрузочного тока. Это приводит к изменению выходного напряжения генератора.

Комбинированная система образуется объединением разных систем в одну.

По принципу действия системы автоматики делятся:
- Статические системы контролируют регулируемый параметр, который не имеет стабильного значения, и с повышением нагрузки меняется на определенное значение, которое называется ошибкой регулирования. Рассмотренные выше системы – это простые статические системы. Ошибка регулирования возникает из-за большего отклонения напряжения для создания большего тока. Напряжение генератора зависит от нагрузочного тока по прямой зависимости. Максимальное отклонение разности потенциалов называется статизмом системы.
- В астатической системе автоматики разность потенциалов на генераторе изменяется регулировкой реостата R, подключенного в цепь возбуждающей обмотки L.

Сервомотор М начинает работать и двигать ползунок реостата, когда возникает сигнал на входе. Ползунок двигается, пока сигнал не обнулится. Система такого типа имеет отличие в том, что для поддержки новой величины тока возбуждения не нужен сигнал на выходе усилителя. Такое отличие и дает возможность избавиться от статизма.
Виду цепи передачи сигналов:
- Разомкнутые. Во время разомкнутой цепи система управления реагирует на воздействия без получения информации о величине регулируемых параметров, и без сравнения результатов работы, а также без возможности корректировки. Такие системы применяются в обеспечении заданной температуры в помещении, в автоматических турникетах и т. д.
- Замкнутые. При замкнутой цепи система управления получает данные о величине параметров, сравнивает их с требуемыми, производит корректировку. Такое замыкание цепи выполняется с помощью обратной связи от управляемой системы к управляющей.
Количеству обратных связей:
- Многоконтурные. Системы, имеющие кроме главного контура обратные связи, называются многоконтурными. В отличие от одноконтурных систем, в многоконтурных системах воздействие к точке системы способно обойти систему и обратно вернуться в первую точку по нескольким различным контурам.
- Одноконтурные. Современные системы автоматики чаще всего имеют параллельные устройства коррекции или обратные связи. Системы, которые регулируют только один параметр с одной обратной связью, называются одноконтурными. В них воздействие на некоторую точку системы может пройти всю систему и обратно вернуться к первой точке, при этом пройдя по одному контуру.
Управлению:
- Следящие системы. К таким системам относятся системы автоматики, в которых сигнал, меняющийся произвольным образом, в результате выходит с допустимой ошибкой. Основной компонент следящей системы – датчик рассогласования. Он определяет ошибку между ведущей и ведомой величинами.
- Программное регулирование. Системы автоматики, заставляющие регулируемый параметр изменяться по заданному программой закону, получили название систем программного регулирования. Программа изменения параметра создается специалистами с учетом поставленной задачи регулирования.
- Автоматическая стабилизация. В системах автоматической стабилизации регулируемый параметр при различных возмущениях, которые действуют на систему, стабилизируется регулятором до постоянной величины.
Связи выходного и входного параметра:
- Непрерывные. В ранних примерах было принято, что действие на рабочий орган осуществлялось непрерывно за все время, пока имеется отклонение регулируемого параметра. Такая система называется системой непрерывного действия.
- В дискретных системах действие на рабочий орган производится ступенчато. Для примера можно рассмотреть работу утюга, в котором регулировка принимает одно из двух положений при изменении температуры. В такой системе регулировка температуры производится коммутацией нагревательного элемента по сигналу датчика. При повышении температуры выше предела датчик разрывает контакт и выключает нагреватель. При уменьшении температуры менее определенного значения, нагреватель подключается. Такая система не находится в устойчивом состоянии, и имеет два положения включения: в меньшую или большую сторону.
- Для создания качественной регулировки автоматики могут содержать специальные устройства, которые являются обратными связями. В них сигнал направлен в противоположную сторону от основного сигнала управления.
Виду источника энергии:
- Пневматические – обеспечивают высокую скорость, применяют энергию сжатого газа.
- Электрические – удобны в работе и легки в передаче информации и ее обработке.
- Гидравлические – обеспечивают повышенную мощность, применяют энергию жидкости.
Телемеханические системы автоматики
Если компоненты системы находятся далеко между собой, то для соединения применяется передатчик, приемник и каналы связи. Поэтому эти системы называются телемеханическими.

Они состоят из управляющего пункта с оператором, пунктов контроля с объектами контроля А1-Ап, каналов передачи L1А-LпА, которые соединяют управляющий пункт Е1М с контрольными пунктами Е2А-Еп. В системе телемеханики по каналам передачи можно передавать многие виды информации.
Система телеизмерения
Если информация передается только о контрольном объекте, то системы называют телеизмерением. В них сигналы от датчика передаются на управляющий пункт Е1М, преобразуются в показания цифровых или стрелочных измерительных приборов. При этом передача информации может происходить непрерывно или с перерывами.
Система телесигнализации
Если от датчика поступает сигнал на пункт управления только о том, включен объект контроля или выключен, такие системы автоматики называются системами телесигнализации.
Телесигнализация выдает данные по управлению объектом контроля, либо служит информацией для решения по управлению в системах телерегулировки и телеуправления. Главным отличием этих систем от других заключается в непрерывности и дискретности сигналов.
Похожие темы:
- Умный дом. Особенности технологий и преимущества устройства
- Arduino Uno. Устройство и применение. Особенности
- Ардуино для проекта «Умный дом». Работа и особенности установки
- Компьютерные сети. Виды. Классификация. Работа. Стандарты
- Система АСКУЭ. Что это и как работает. Электронный счетчик
- Релейная защита. Виды и устройство. Работа и особенности
- Распределительные шкафы (ШР). Виды и назначение. Особенности
Источник: electrosam.ru
Системы автоматики: системы автоматического контроля, управления и регулирования

Все элементы автоматики по характеру и объему выполняемых операций подразделяют на системы: автоматического контроля, автоматического управления, автоматического регулирования.
Система автоматического контроля (рис. 1) предназначена для контроля за ходом какого-либо процесса. Такая система включает датчик В, усилитель А, принимающий сигнал от датчика и передающий его после усиления на специальный элемент Р, который реализует заключительную операцию автоматического контроля — представление контролируемой величины в форме, удобной для наблюдения или регистрации.
В частном случае в качестве исполнительного элемента Р могут служить сигнальные лампы или звуковые сигнализаторы. Систему с такими элементами называют системой сигнализации .

Рис. 1. Система автоматического контроля
В систему автоматического контроля кроме указанных на рис. 1, а могут входить и другие элементы — стабилизаторы, источники питания, распределители (при наличии нескольких точек контроля или нескольких датчиков в одном исполнительном элементе Р) и т. д.
Независимо от количества элементов системы автоматического контроля являются разомкнутыми и сигнал в них проходит только в одном направлении — от объекта контроля Е к исполнительному элементу Р.
Система автоматического управления предназначена для частичного или полного (без участия человека) управления объектом либо технологическим процессом. Эти системы широко применяют для автоматизации, например, процессов пуска, регулирования частоты вращения и реверсирования электродвигателей в электроприводах всех назначений.
Необходимо указать на такую важную разновидность систем автоматического управления, как системы автоматической защиты , которые не допускают аварийного или предельного режима, прерывая в критический момент контролируемый процесс.

Система автоматического регулирования поддерживает регулируемую величину в заданных пределах. Это наиболее сложные системы автоматики, объединяющие функции автоматического контроля и управления. Составная часть этих систем — регулятор .
Если системы выполняют только одну задачу — поддерживают постоянной регулируемую величину, их называют системами автоматической стабилизации. Однако существуют такие процессы, для которых необходимо изменять во времени регулируемую величину по определенному закону, обеспечивая ее стабильность на отдельных участках. В этом случае автоматическую систему называют системой программного регулирования .
Для обеспечения постоянства регулируемой величины можно использовать один из принципов регулирования — по отклонению, возмущению или комбинированный, которые будут рассмотрены применительно к системам регулирования напряжения генераторов постоянного тока.
При регулировании по отклонению (рис. 2 и 3) элемент сравнения UN сравнивает фактическое напряжение U ф с заданным Uз, определяемым задающим элементом EN. После сравнения на выходе элемента UN появляется сигнал Δ U=Uз — U ф, пропорциональный отклонению напряжения от заданного. Этот сигнал усиливается усилителем А и поступает на рабочий орган L. Изменение напряжения на рабочем органе L, которым является обмотка возбуждения генератора G, приводит к изменению фактического напряжения генератора, устраняющего его отклонение от заданного.
Усилитель А, не изменяющий принципа действия системы, необходим для ее практической реализации, когда мощность сигнала, поступающего от элемента сравнения UN, недостаточна для воздействия на рабочий орган L.
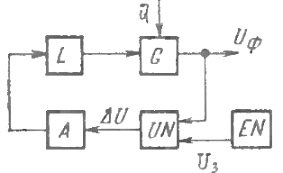
Рис. 2. Система автоматического регулирования
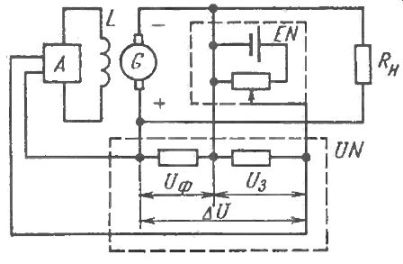
Рис. 3. Автоматическое регулирование по отклонению
Наряду с задающим воздействием на систему могут влиять различные дестабилизирующие факторы Q, которые вызывают отклонение регулируемой величины от заданной. Воздействия дестабилизирующих факторов, один из которых условно обозначен на рисунке буквой Q, могут проявляться в различных местах системы и, как принято говорить, поступать по различным каналам. Так, например, изменение температуры окружающей среды приводит к изменению сопротивления в цепи обмотки возбуждения, что в свою очередь влияет на напряжение генератора.
Однако где бы ни возникали воздействия Q (со стороны потребителя — ток нагрузки, вследствие изменения параметров цепи возбуждения), система регулирования будет реагировать на вызванное ими отклонение регулируемой величины от заданной.
Наряду с рассмотренным принципом регулирования используют регулирование по возмущению , при котором в системе предусматривают специальные элементы, измеряющие воздействия Q и влияющие на рабочий орган.
В системе, использующей только такой принцип регулирования (рис. 4 и 5), фактическое значение регулируемой величины не учитывается. Принимают во внимание только одно возмущающее воздействие — ток нагрузки I н. В соответствии с изменением тока нагрузки происходит изменение магнитодвижущей силы (мдс) обмотки возбуждения L2, являющейся измерительным элементом данной системы. Изменение мдс этой обмотки приводит к соответствующему изменению напряжения на выводах генератора.
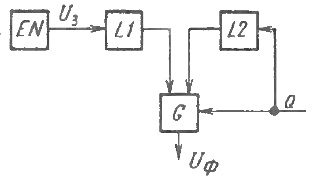
Рис. 4. Автоматическое регулирование по возмущению
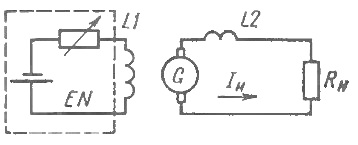
Рис. 5. Принципиальная схема системы автоматики
Система, осуществляющая комбинированное регулирование (по отклонению и возмущению), может быть получена объединением ранее рассмотренных систем в одну (рис. 6)
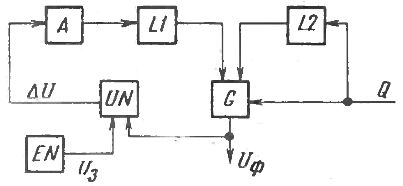
Рис. 6. Система автоматики комбинированного регулирования
В системе автоматического регулирования задающий элемент представлял собой эталон напряжения, с которым сравнивалась регулируемая величина U ф. Значение U p принято называть уставкой регулятора. В общем случае регулируемую величину обозначают буквой Y , а ее уставку Yo .
Если уставку Yo в заданных пределах оператор изменяет вручную, а регулируемой величиной является Y , система работает в режиме стабилизации. Если уставка регулятора изменяется произвольно во времени, система автоматики, поддерживая значение Δ Y = Yo — Y = 0, будет работать в следящем режиме, т. е. следить за изменением Yo .
И наконец, если уставку Yo изменять не произвольно, а по заранее известному закону (программе), система будет работать в режиме программного управления. Такие системы называют системами программного регулирования .
не имеет замкнутой цепи воздействия по регулируемой величине, поэтому ее называют разомкнутой.
Системы автоматики по принципу действия подразделяют на статические и астатические. В статических системах регулируемая величина не имеет строго постоянного значения и с увеличением нагрузки изменяется на некоторую величину, называемую ошибкой регулирования.
Рассмотренные системы (рис. 1 — 6) являются примерами простейших статических систем. Наличие ошибки регулирования в них обусловлено тем, что для обеспечения большего тока возбуждения необходимо большее отклонение напряжения.
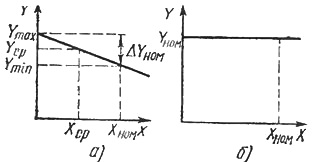
Рис. 7. Внешние характеристики систем автоматики: а — статической, б — астатисческой
Зависимость напряжения генератора от тока нагрузки в виде прямой наклонной линии показана на рис. 7, а. Наибольшее относительное отклонение напряжения от заданного называют статизмом системы по напряжению: Δ = = (Um a x — Umin)/Um a x, где (Um a x, Umin — напряжения генератора на холостом ходу и под нагрузкой. Обобщая сделанное заключение для любой статической системы, можно записать: Δ = ( Y m a x — Y min)/ Y m a x, где Y — регулируемая величина.
Иногда статизм определяют по другой формуле: Δ = ( Y m a x — Y min)/ Y ср, причем Y ср = 0,5( Y m a x + Y min) — среднерегулируемая величина Y . Статизм называют положительным, если с ростом нагрузки значение Y уменьшается, и отрицательным, если значение Y увеличивается.
В астатических системах статизм равен нулю и поэтому зависимость регулируемой величины от нагрузки представляет собой линию, параллельную оси нагрузки (рис. 7,6).
Рассмотрим, например, астатическую систему автоматики (см. рис. 8), в которой напряжение генератора регулируется изменением сопротивления реостата R , включенного в цепь обмотки возбуждения L.
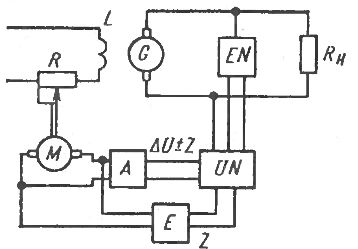
Рис. 8. Астатическая система автоматики
Серводвигатель М начинает вращаться и перемещать ползунок реостата R всякий раз, когда на входе усилителя А появляется сигнал Δ16; U об отклонении напряжения генератора U ср от заданного значения U p . Ползунок реостата перемещается до тех пор, пока сигнал об отклонении не станет равным нулю. Такая система отличается от другой системы тем, что для поддержания нового значения тока возбуждения не требуется сигнала на выходе усилителя А. Это отличие и позволяет избавиться от статизма.
Во всех ранее приведенных примерах предполагалось, что воздействие на рабочий орган производилось непрерывно в течение всего промежутка времени, пока существует отклонение регулируемой величины от заданной. Такое управление называется непрерывным , а системы — системами непрерывного действия .
Однако существуют системы, называемые дискретными, в которых воздействие на рабочий орган осуществляется с перерывами, например система регулирования температуры подошвы утюга, в которой регулирующее воздействие может принимать только одно из двух фиксированных значений при непрерывном изменении регулируемой величины — температуры.
В этой системе регулирование температуры осуществляется включением и отключением нагревательного элемента R по сигналу датчика температуры (смотрите — Базовые элементы автоматики). При увеличении температуры сверх уставки датчик размыкает свой контакт и отключает нагревательный элемент. При снижении температуры ниже уставки нагревательные элементы включаются. Эта система не имеет устойчивого промежуточного состояния рабочего органа, а он занимает лишь два положения — включено в сторону «больше» или включено в сторону «меньше».

Для обеспечения необходимого качества процесса регулирования в системе могут быть предусмотрены специальные устройства, называемые обратными связями . Эти устройства отличаются от других тем, что сигнал в них имеет направление, обратное основному управляющему сигналу.
Для примера на рис. 8 изображена обратная связь Е по отклонению регулируемой величины Δ U , соединяющая выход усилителя А со входом элемента сравнения UN. При положительной обратной связи Е на выходе элемента сравнения UN получается сумма величин Δ U и Z, а при отрицательной — их разность.
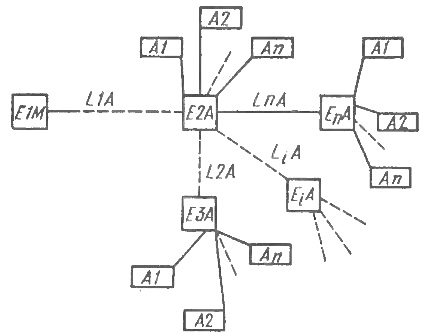
Рис. 9. Структурная схема системы телемеханики
Рассмотренные системы автоматики предполагают непосредственную связь всех входящих в них элементов. Если элементы системы автоматики расположены на значительном удалении друг от друга, для их соединения используют передатчики, каналы связи и приемники. Такие системы называют телемеханическими .
Телемеханическая система состоит из пункта управления, где находится оператор, управляющий работой системы, одного или нескольких контролируемых пунктов, на которых расположены объекты контроля A 1 — An, линий связи L1A — LnA (каналы передачи данных), соединяющих пункт управления Е1М с контролируемыми пунктами Е2А — Еn (рис. 9). В телемеханической системе по линиям связи можно передавать как все, так и некоторые виды контрольной и управляющей информации.
При передаче информации только о параметрах ОК телемеханическую систему называют с истемой телеизмерения , в которой сигналы с выходов датчиков (измерительных преобразователей, установленных на ОК) передаются на пункт управления Е1М и воспроизводятся в виде показаний стрелочных или цифровых измерительных приборов. Информация может передаваться как непрерывно, так и периодически, в том числе и по команде оператора.
Если на пункт управления передается только информация о состоянии, в котором находится тот или иной объект контроля («включен», «выключен», «исправен», «неисправен»), такую систему называют системой телесигнализации .
Телесигнализация, как и телеизмерение, выдает оператору исходные данные для принятия решения по управлению ОК или служит для выработки управляющих воздействий в системах телеуправления и телерегулировки. Основное отличие этих систем от предыдущих заключается в том, что в первой из них используются дискретные сигналы типа «включить», «выключить», а во второй — непрерывные, подобно обычным системам регулирования.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Источник: electricalschool.info
Устройство и принцип работы автоматического выключателя
Многих интересует, для чего нужен автоматический выключатель, а также устройство и принцип действия автоматического выключателя. Сегодня в нашей статье мы постараемся ответить на эти вопросы.
Итак, начнем с первого вопроса. Автоматический выключатель устанавливают для того, чтобы защитить кабели, провода, а также электроприборы от короткого замыкания (к.з.) и перегрузки.
Устройство автоматического выключателя
Модульный автоматический выключатель внешне представлен в виде корпуса и рычага управления, которые выполнены из ПВХ-пластиката пониженной горючести. Также невооруженным взглядом можно определить клеммы (нижняя и верхняя) для подключения кабеля или провода. Внутри же корпуса защитного аппарата размещаются следующие элементы:
.jpg)
• силовые контакты (подвижный и неподвижный), обеспечивающие коммутацию;
• механизм взвода и расцепления, который взаимосвязан с рычагом управления;
• катушка (электромагнит) и подвижный сердечник (якорь), выполняющий функцию толкателя. Эти элементы являются электромагнитным расцепителем и обеспечивают защиту от токов к.з.;
• дугогасительная камера. Данное устройство выполняет быстрое гашение дугового разряда, который образуется при размыкании контактов;
• биметаллическая пластина. Данный элемент является тепловым расцепителем и обеспечивает защиту от повышенной нагрузки. Также имеется регулировочный винт, при помощи которого обеспечивается регулировка значения тока, при котором данный расцепитель должен сработать.
.jpg) Принцип работы автоматического выключателя
Принцип работы автоматического выключателя
Работа автоматического выключателя в различных режимах происходит по такому принципу:
1. Нормальный режим.
Во время взвода рычага управления выключателем приводится в движение механизма взвода и расцепления, тем самым осуществляя коммутацию силовых контактов.
После коммутации ток протекает от питающего провода или кабеля, подключенного к винтовому зажиму, через этот зажим по контактам, сначала по неподвижному, а затем и по подвижному. Далее ток проходит через гибкую связь, катушку электромагнита, снова через гибкую связь и биметаллическую пластину, и в конце через нижний винтовой зажим к отходящей линии, «питающей» электроприбор.
2. Короткое замыкание.
.jpg)
В данном режиме электромагнитный расцепитель автоматического выключателя должен произвести мгновенное отключение нагрузки. Принцип действия заключается в следующем: при значительном превышении номинального тока, протекающего через обмотку электромагнита, возникает мощное магнитное поле, которое тянет вниз якорь с подвижным контактом. Якорь в свою очередь надавливает на рычажок спускового механизма, в результате чего происходит отключение нагрузки.
Необходимо отметить, что в результате мгновенного возникновения магнитного поля автоматический выключатель успевает отключиться до появления нежелательных последствий.
Однако во время размыкания возможно возникновение дугового разряда между подвижным и неподвижным контактами. Дуга движется в сторону дугогасительной камеры. Попадая на пластины, дуга расщепляется, завлекается внутрь камеры и тухнет. Образовавшиеся продукты горения вместе с избыточным давлением выходят наружу через специальное отверстие в корпусе автомата.
.jpg)
За защиту от перегрузки отвечает тепловой расцепитель. Принцип работы данного расцепителя заключается в следующем: когда ток, протекающий через биметаллическую пластину, становится равным или больше установленного значения, пластина нагревается и постепенно изгибается. Достигнув определенного угла изгиба, она надавливает своим кончиком на рычажок спускового механизма. Таким образом автомат отключается.
Стоит отметить, что терморасцепитель, в отличие от магнитного, является более медлительным. Для его срабатывания требуется больше времени, но зато он более точный и легче поддается настройке.
Мы рассказали об устройстве и принципе работы автоматического выключателя. Также вы можете посмотреть наше видео, в котором детально показано, как устроен автомат и принцип его работы.
Источник: cable.ru