. свой вариант управления лодочным моторам управления необходимо потому что я нахожусь впереди мотор находится .
Дистанционное управление лодочным мотором своими руками
lượt xem 8 N 4 năm trước
По дорогие друзья мотор установлен на транец подключены к нему все механизмы управления как вы видите вот с этой .
Самодельный механизм поворота лодочного мотора
lượt xem 149 N 7 năm trước
Самодельное дистанционное управление подвесным лодочным мотором Mercury M5 . Часть вторая: Рулевой механизм.
Самая лучшая дистанция на лодку ПВХ своими руками.
lượt xem 23 N Năm trước
Естественно все это сделано своими руками понятно начнем с рулевого рулевая как я говорил это уже москве чешская .
РУЛЕВОЕ УПРАВЛЕНИЕ НА ЛОДКЕ ПВХ СВОИМИ РУКАМИ.
lượt xem 14 N 3 năm trước
Сделай САМ)
Электро-рейка для лодочного мотора
lượt xem 9 N 2 năm trước
Разработка дистанционного управления лодочным мотором с помощью джойстика и электромоторов позволит .
Самодельное дистанционное управление лодочным мотором 2015
lượt xem 16 N 6 năm trước
Из ПВХашки в катер МЕЧТЫ своими руками. Установка дистанционного управления на Лодку пвх и ее тюнинг
Сводный краткий ролик про самодельный комплект дистанционного управления образца 2015 года. По всем вопросам .
Дистанционное управление на лодку ПВХ. Часть1 — консоль рулевого управления из труб «Джокер».
lượt xem 14 N 2 năm trước
Изготовление быстросъемной регулируемой рулевой консоли с креплением на лик-трос из труб «Джокер» своими руками.
Дистанционное управление мотором Вихрь-30 своими руками! Всё готово!
lượt xem 636 5 tháng trước
Дистанция на мотор Вихрь-30, да как и на любой мотор. Все делалось своими руками!
Это по истине .
Самодельное дистанционное управление лодочным мотором sailor 9.9-15 лс.
lượt xem 39 N 7 năm trước
Своими руками сделал самодельное дистанционное управление лодочным мотором из рубашек велосипедных тросиков, .
Самая простая и надёжная машинка газ реверс своими руками.
lượt xem 8 N Năm trước
Тоже чехол он шил на мотор как потихоньку занимаюсь еще интересно чтобы такую ношу сейчас покажу нашел и вот .
Дистанционное управление на лодке
lượt xem 14 N 3 năm trước
Дистанционное управление лодочным мотором своими руками.
lượt xem 5 N 3 năm trước
Самодельное управление лодочным мотором на резиновую лодку из троса стояночного тормоза. Первое испытание.
Дистанционное включение передачи на ПЛМ одним тросом! своими руками.
lượt xem 916 Năm trước
Для рукастых водномоторников. Как самостоятельно сделать дистанционное включение передачи на подвесном лодочном .
Дистанционное управление для лодки ПВХ. Часть 1
lượt xem 33 N 4 năm trước
Оригинальное дистанционное управление лодочного мотора Merkury 5.0.
Из ПВХашки в катер МЕЧТЫ своими руками. Установка дистанционного управления на Лодку пвх и ее тюнинг
lượt xem 1,8 N 6 tháng trước
Всегда мечтал о лодке с рулевым управлением и вот наконец то могу осуществить свою мечту. В данном ролике показан .
Дистанционное управление лодочным мотором! Тесты на воде, настоящий восторг!
lượt xem 28 N 2 năm trước
Самая лучшая дистанция на лодку ПВХ своими руками.
Наконец-то полностью собрано дистанционное управление на лодочный мотор, собрана консоль на лодке и мы готовы к .
Источник: vnclip.net
VIDEOMiN .ORG

04:18
автор: Videomax 3147408 просмотров

Дистанционное управление лодочным электромотором
Minn Kota i-Pilot является одной из самых заметных разработок, сделанных в последнее время. Дистанционное управление лодочным электромотором выполняется водонепроницаемым пластиковым пультом и существенно упрощает жизнь на рыбалке. i-Pilot включен в комплект поставки электромоторов Minn Kota Ulterra, Minn Kota Terrova и Minn Kota PowerDrive V2.
Основные возможности системы i-Pilot
Помимо управления скоростью лодки и ее курсом система обладает еще несколькими замечательными возможностями:
Электронный якорь (Spot-Lock) – удерживает лодку на воде в выбранной точке. Положение лодки автоматически записывается в память, которая может хранить до шести таких мест.
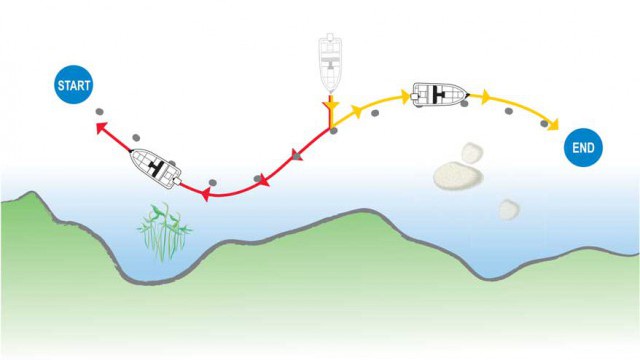
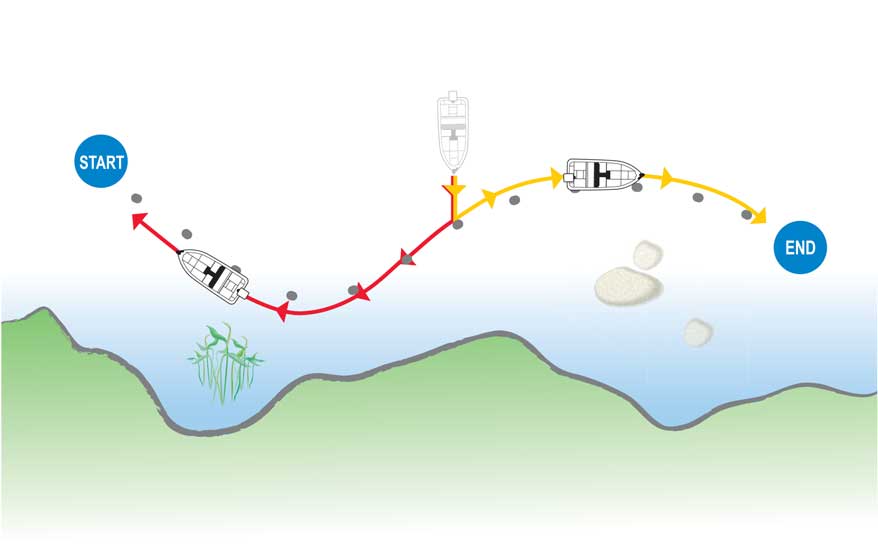
Запись маршрута (Record a Track) – запоминает не одну точку, а весь путь длиной до шести миль. Память так же рассчитана на хранение шести маршрутов. Их повторное прохождение будет полностью автоматическим.
Круиз контроль (Cruise Control) – устанавливает и поддерживает скорость лодки с точностью до одной десятой мили в час.

Автопилот (Advanced Auto Pilot) – ведет лодку по намеченному курсу. Использует GPS для сохранения точного направления движения, устанавливая поправки на ветер, волны, боковой дрейф и течение.
Пульт управления i-Pilot
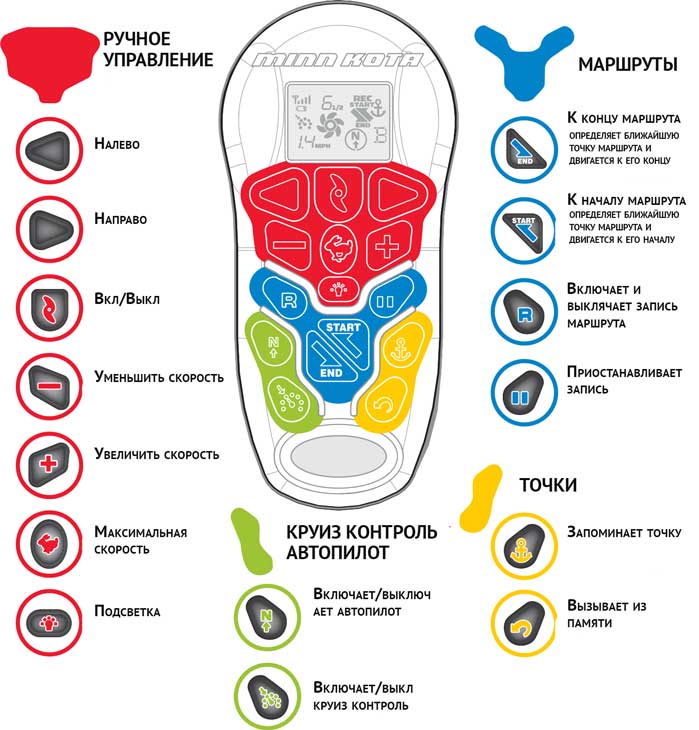
Управление
Пульт условно может быть разделен на четыре зоны: ручное управление, маршруты, точки лова, автопилот/круиз контроль. Кнопки в зоне ручного управления не требуют наличия GPS сигнала и позволяют управлять скоростью, направлением движения и включением/выключением мотора. Для работы остальных функций необходим хотя бы минимальный GPS сигнал.
Конструкция
Материалом служит ударопрочный пластик. Пульт водонепроницаем и не тонет. Снабжен большим жидкокристаллическим экраном и обладает тремя видами памяти для записи маршрутов движения и отдельных мест лова.
Дальность действия
Дальность работы пульта зависит от способа его использования и сильно уменьшается при установке или работе вблизи конструкций, выполненных из стали или алюминия.
Питание
Система сконструирована таким образом, что если контроллер находится в зоне действия и подключен к источнику напряжения, пульт автоматически отключается спустя тридцать минут после последнего нажатия клавиши.
Контроллер

Контроллер содержит очень чувствительный цифровой компас, который получает сигналы как от GPS спутников, так и с пульта управления. Для нормальной работы контроллеру необходимо иметь над собой открытое пространство и находится в зоне видимости пульта управления. Вся электроника внутри контроллера полностью герметична.
Точность работы GPS
Точность, с которой i-Pilot управляет вашей лодкой зависит от большого количества факторов. Для того, чтобы было понятно принципиальное поведение системы, некоторые из них приведены в таблице.
| Фактор | Оказываемое действие |
| Отношение тяги электромотора и веса лодки | Слишком большая тяга на маленьких лодках может заставлять i-Pilot постоянно корректировать положение. Недостаточная тяга на больших лодках будет причиной медленной реакции на новую команду |
| Ветер | Слишком сильный ветер или течение могут уменьшить точность позиционирования лодки |
| Сила сигнала GPS | Чем сильнее сигнал, тем выше точность |
| Уровень заряда аккумулятора электромотора | Полностью заряженный аккумулятор позволяет достичь большей точности |
Как работает система Minn Kota i-Pilot

i-Pilot использует сигнал со спутника GPS и данные цифрового компаса для того, чтобы определить координаты лодки и положение головки электромотора. После этого он расставляет воображаемые точки от вашего текущего места по направлению к цели маршрута, запоминает их координаты и использует для автоматического движения в выбранном направлении.
Маршруты в свою очередь состоят из множества точек, которые i-Pilot запоминает во время записи движения лодки. Расстояние между этим точками зависит от силы сигнала GPS и от скор
ости лодки. Чем сильнее сигнал, тем меньшее расстояние будет между точками и точнее можно будет воспроизвести путь потом.
i-Pilot может записать шесть индивидуальных точек и шесть маршрутов. Запись производится в разные виды памяти, поэтому ситуация, когда места лова будут перезаписаны маршрутами движения невозможна.
Нажатие любой клавиши на управляющей педали отключает Spot Lock
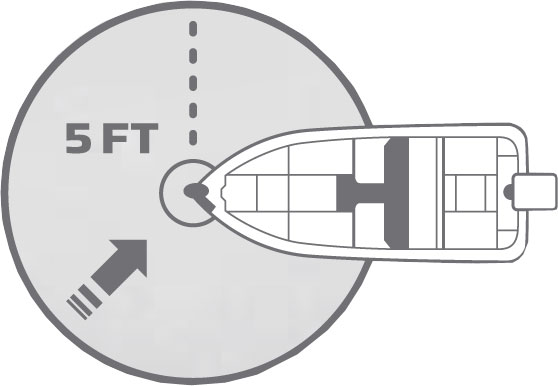
Как работает Spot Lock
После того как вы нажали клавишу Spot Lock i-Pilot использует ваши текущие координаты, для расчета смещения лодки. Эти координаты автоматически запоминаются и хранятся устройством. Вокруг выбранной точки рисуется воображаемая окружность, пересечение которой будет служить сигналом для корректировки положения. Если лодка находится внутри окружности — мотор выключен, винт не вращается. Если граница пересекается — отдается команда электромотору, и лодка возвращается в первоначальную позицию.
Как работает круиз контроль
i-Pilot автоматически регулирует скорость вращения винта электромотора для того, чтобы поддерживать постоянную GPS скорость
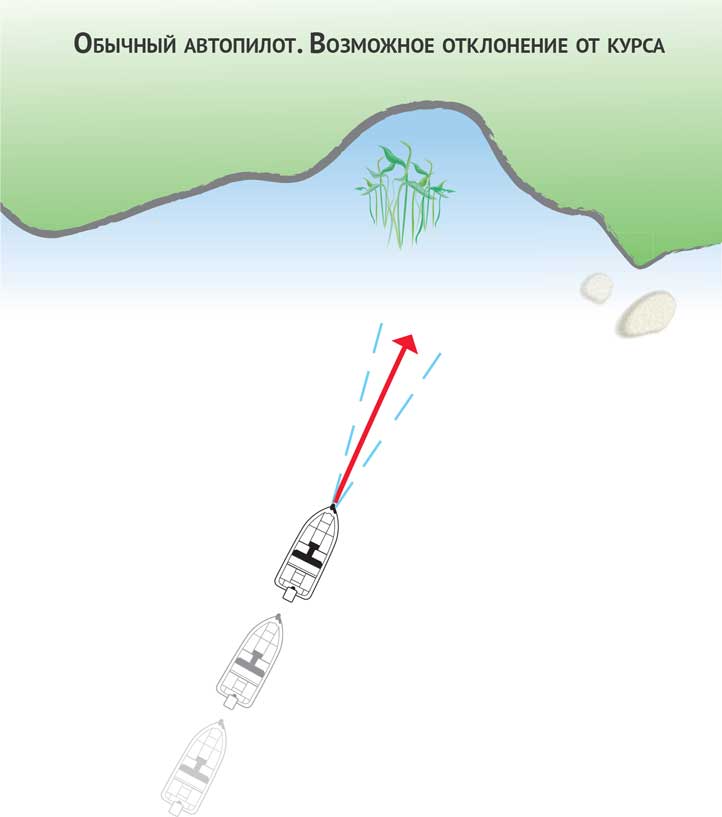
Как работает автопилот
Существует два вида автопилота. Обычный автопилот использует встроенный компас для поддержания курса. Вы указываете направление, повернув в нужную сторону головку электромотора, автопилот блокирует ее произвольное вращение и ориентируясь по компасу ведет лодку вперед.
Если после этого вы вручную повернули головку, система воспринимает команду к смене курса и принимая в расчет показания компаса, фиксирует электромотор уже в новом направлении.
Этот метод управления не учитывает внешние силы, такие ветер или течение из-за которых может возникнуть боковой дрейф.
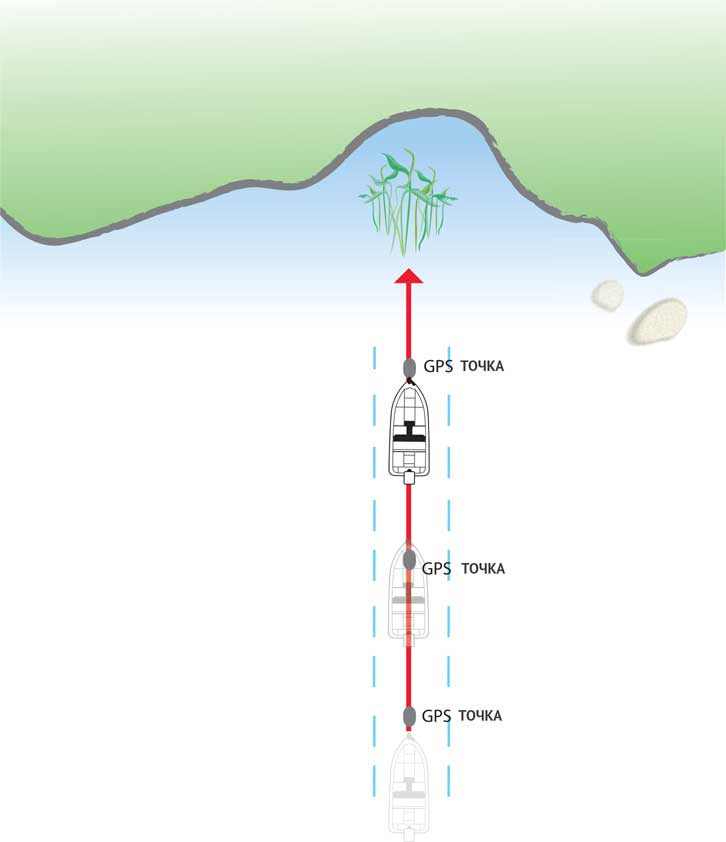
Продвинутый автопилот тоже использует показания компаса, но корректирует их исходя из данных, получаемых со спутников GPS. Знание точных GPS координат позволяет вносить поправки на боковой ветер или течение.
Такая система точно удерживает лодку на прямой. Когда продвинутый автопилот включен, он генерирует набор точек в направлении головки электромотора, проводит по ним линию и затем просто перемещает между этими точками лодку. Если вы указываете новое направление, устройство создает новый набор GPS точек.
Ручная регулировка скорости отключает круиз контроль
Когда и какой автопилот использовать? Оба вида имеют свои преимущества. Выбирать следует в зависимости от способа лова и необходимого поведения приманки.
Продвинутый автопилот в большинстве случаев будет лучше удерживать лодку на прямой линии. Однако если вы двигаетесь при очень сильном ветре или течении, электромотору может не хватить тяги для плавного управления. В таких условиях правильнее будет использовать обычный автопилот и тем самым дать лодке возможность немного отклониться от курса.
Оба автопилота служат мощным инструментом для задания точного поведения приманки. Наилучший способ понять их работу — попробовать обе системы в действии на воде и затем принимать решение исходя из конкретных условий лова.
Как работает запись маршрута
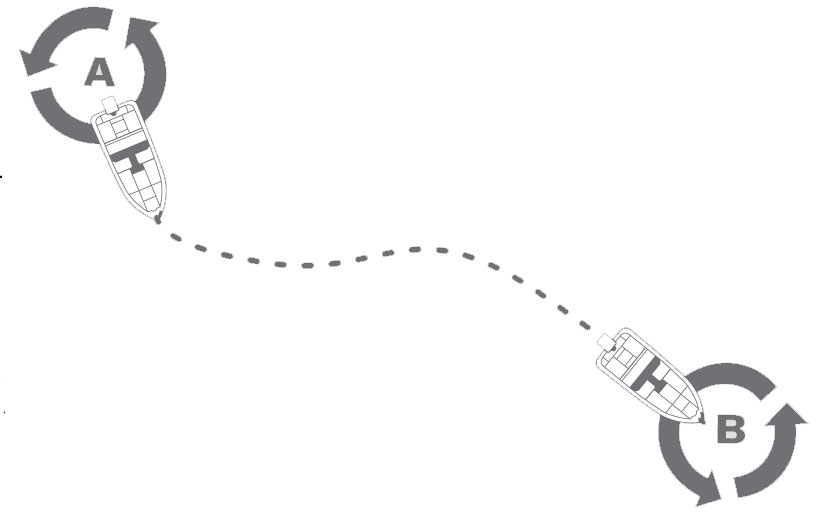
Как уже упоминалось, i-Pilot представляет себе маршрут движения лодки в качестве набора точек. Первая записанная точка считается началом маршрута, последняя его окончанием.
Предположим вы хотите еще раз пройти по уже записанному ранее пути. Как это сделать? Нажимаете на клавишу Track to Start или Track to End. Система определяет местонахождение лодки, находит ближайшую к вам точку выбранного маршрута и направляет судно к ней. После того как это место достигнуто, лодка двигается к следующей точке, затем к следующей пока не дойдет до начала или конца пути.
Во время движения i-Pilot автоматически держит лодку на курсе, у вас остается возможность управлять скоростью. Ее можно регулировать вручную или установить с помощью круиз контроля. При этом скорость должна быть достаточно высока для того, чтобы лодка оставалась на курсе несмотря на ветер или течение.
Задайте вопрос,
и получите консультацию по лодочным электромоторам, аккумуляторам или зарядным устройствам для катера или яхты
Источник: fisherninja.ru
Руководство по дистанционному управлению лодочным мотором
После установки дистанционного управления повышается маневренность, увеличивается обзорность и комфорт от управления моторной лодки. Под управлением понимают удаленное переключение трансмиссии, регулировку оборотов двигателя и возможность изменения направления движения при помощи рулевого механизма.

Виды дистанционного управления лодочным мотором
Для регулирования оборотов двигателя и направления вращения винта устанавливается газореверсная машинка, его еще называют пультом дистанционного управления. Простейшая машинка имеет два рычага, один из которых отвечает за подачу топливовоздушной смеси через дроссель, а второй за переключения передач на редукторе двигателя.
Для управления самой лодкой, направлением ее движения служит система, состоящая из руля и редуктора, соединенного с двигателем тросом или гидравликой.









Устройство дистанционного управления лодкой
- Механическая рулевая система имеет преимущество перед гидравлической в простоте конструкции и относительно низкой цене, но уступает в точности управления моторами. Она состоит из механического рулевого редуктора, троса, рычага и рулевого колеса. Чем мощнее двигатель, тем сложнее его управление, для каждой группы двигателей нужен подходящий редуктор, но при мощности более 150 л.с. рекомендуется устанавливать гидравлическую систему.
- Не ко всем лодочным моторам можно подключить систему дистанционного управления. Из доступных по цене двигателей Yamaha в категории до 30 л.с. представлены три модели.
- Рулевое управление мотора 25 BWC можно уставить как румпельное, так и позже подключить дистанционное, а вот для управления подачей топлива и переключением передач потребуется газореверсная машинка. Его мощность составляет 25 л.с. и цена у официальных дилеров 176 300 рублей, модели с мощностью в 30 л.с. также обладающие возможность подключения дистанционного управления, стоят ненамного дороже.
- Из двухтактных моторов Suzuki стоит обратить внимание на модель DT 30 RL, ориентировочная цена в 142 000 р. В комплект поставки мотора входят газореверсная машинка, переходники тросов и рулевая тяга. Аналогичный по мощности и с возможность подключения ДУ, но уже четырехтактный двигатель будет стоить на 100 тысяч дороже.
- Двухтактные двигателя Tohatsu M 30 HE PL с возможность подключения дистанционного управления стоит чуть дороже, 166 000 рублей, как видно цены на японские моторы примерно на одном уровне, потому стоит обращать внимание на такие факторы, как надежность модели, отзывы других владельцев и экономичность.
- Отечественный мотор, с возможность установкой дистанционного управления, Вихрь 30 Э сравним по мощности с японскими, но значительно выигрывает в цене – всего 53 000 рублей. У него отличная от зарубежных система рулевого управления. Для поворота используются два троса, вместо одного, вследствие чего монтаж несколько усложняется. Сейчас многие российские производители комплектуют свои лодки системой дистанционного рулевого управления, что весьма удобно.





Правила выбора гребного винта
Именно правильно подобранный гребной винт способен создать необходимую частоту вращения коленчатого вала лодочного мотора, но при условии, что дроссельная заслонка открыта полностью и судно максимально загружено. Помимо всего прочего, действительная частота вращения вала мотора зависит от размера гребного винта и технического состояния конкретного судна.
Если лодочный мотор, как и любой другой двигатель, будет эксплуатироваться при завышенных оборотах коленчатого вала, то это в скором времени приведет к негативным последствиям, которые могут сказаться на техническом состоянии мотора, а затем повлечет за собой серьезные неисправности.
Использование правильно выбранного гребного винта действительно может обеспечить не только высокую динамику, но и скорость движения, экономный расход топлива, ну и конечно же, плавность хода по водной поверхности.
Именно качественный и оптимально подобранный гребной винт значительно продлевает эксплуатационный срок службы подвесного мотора.
Идеальным можно считать тот гребной винт, который позволяет двигателю развить рекомендуемое количество оборотов при 80% загруженности водного судна. В случае достижения максимальных оборотов при полной загруженности плавсредства есть вероятность превысить рекомендуемые обороты при неполной загрузке лодки.
Если же двигатель развивает максимально возможные обороты при неполной загрузке судна, то по мере увеличения загруженности он будет «задыхаться». Как результат, неполная и чрезмерная загрузка судна значительно повышает расход топливной смеси и сокращает то расстояние, которое преодолевается на единицу потребления топлива. Именно отсюда исходит вся важность правильного выбора гребного винта. Следует знать, что для винта характерны следующие измерения:
- Диаметр, определяющий максимальный размер гребного винта по лопастям. В частности, грузовые судна используют винты большего диаметра, позволяющие им чувствовать себя уверенно при полной загруженности.
- Шаг определяет длину винтовой поверхности, которая образуется за счет лопасти винта за один оборот. Данный показатель необходим для обеспечения условий движения судна на высокой скорости и к тому же с экономичным расчетом.
Увеличивая шаг винта на одних и тех же оборотах двигателя, можно значительно повысить скорость лодки. Такие действия не только повышают эффективность работоспособности мотора, но и сокращают удельный расход топлива. Увеличение шага винта к тому же улучшает управляемость судна на скоростных поворотах.
Безусловно, материал, из которого изготовлен гребной винт, также считается значимым моментом. В некоторых ситуациях это важнее, чем показатель мощности двигателя. Для двигателей с мощностью 50-110 л. с. оптимальным вариантом являются нержавеющие винты из алюминия или стали.
Итак, установка мотора на лодку – это действительно ответственный момент, поэтому во избежание непредвиденных ситуаций на воде целесообразнее воспользоваться рекомендациями специалистов.
Установка дистанционного управления лодочным мотором
- Стоит с внимательностью отнестись к выбору места расположения газоревресной машинки, так как после установки для переноса нужно будет либо укорачивать, либо покупать новые троса.
- Самостоятельная установка дистанционного управления на лодку без соответствующей подготовки может стать причиной поломки двигателя, но если вы решились на это, то стоит основательно подготовиться.
- Перед покупкой троса стоит точно рассчитать расстояние от машинки до двигателя, прокладка должна осуществляться в таких местах, чтобы рубашка троса подвергалась механического воздействию и надежна закреплена, допустимый радиус изгиба не более 150 мм.
- Подробная схема подключения должна быть в инструкции к двигателю. Установка системы дистанционного управления на надувную лодку немного сложнее, для этого используют рулевые консоли, которые крепятся к баллонам или устанавливаются прямо на палубу лодки.
- На многих лодках с жесткими корпусами предусмотрены места для монтажа машинки и рулевого механизма, что значительно упрощает монтаж системы ДУ.



Система ДУ газом
Данная схема состоит из контроллера, комплекта из двух тросов газа и реверса и фитингов.

- Контролеры подготовлены для одномоментного управления двумя двигателями или одним. Они могут быть как с одной рукояткой, так и с двумя для контроля газа и реверса. На ряде моделей есть специальная кнопка для выполнения трим-команды (гидроподъем двигателя).
- Трос приходится подбирать отдельно в зависимости от модели мотора, различаясь по диаметру, внутренней оболочке (для снижения силы сопротивления при трении троса) и так далее. Замеры делаются также, как при определении длины рулевого троса.
- Фитинги нужны для смыкания тросов с контроллерами и моторами. К примеру, для некоторых движков годятся тросы с резьбовыми наконечниками, а контроллер при этом допускает сцепку с петлеобразными. Чтобы контакт произошел, необходимы фитинги.
Чаще всего встречается тянущее ДУ, когда движок получает команды посредством гибких тросов. Они более надежные. А для толкающего ДУ применяют жесткие составляющие.
Сегодня нередко можно встретить модели систем ДУ, которые снабжены двумя управляющими комплектами. Один из них управляет катером. Другой организует работу движка в режиме прогрева.
В конечном счете существующие примеры ДУ для управления лодки с мотором размещаются по правому или левому борту. Некоторые могут устанавливаться и там и там. Для натяжения тросов используются специальные винты, которые помогают настроить их нужную длину.
Трос для дистанционного управления лодочным мотором
В системе рулевого управления при подборе троса нужно исходить из модели рулевого редуктора, а он подбирается по мощности навесного мотора.
Для подбора троса управления двигателем следует знать, что к каждому двигателю подходит трос только определенной марки, а его длина рассчитывается исходя из длины лодки.
Следует измерить расстояние от машинки до транца лодки, прибавить к нему половины ширины транца и 90 см. для поворотной петли.
При расчете длины троса рулевого управления замеряется расстояние от центра рулевого редуктора до борта лодки, длину пути вдоль борта плюс половина ширины транца. В конце вычесть 10 см за каждый изгиб в 90 градусов, в результате мы получим требуемую длину троса.
Что касается марок, то в инструкции к мотору указаны требуемая марка троса и его класс, также есть универсальные тросы подходящие к большинству двигателей Yamaha, Suzuki, Tohatsu.
Для моторов от Mercury и Johnson придется приобрести дополнительные адаптеры в случае использования универсальных тросов.
Механическая система ДУ
В ДУ входит рулевая система для контроля поворотов мотора и система управления газом. Рулевые делятся на механические и гидравлические. Стоимость первой системы ниже и легче процесс установки.
Но при этом их нельзя применять на движках большой мощности. Также рулевой трос чутко реагирует на перегибы и не может долго использоваться. В механические устройства входит:
| № | Полезная информация |
| 1 | редуктор |
| 2 | трос |
| 3 | рычаг |
| 4 | колесо |
Далее следует разобраться, какое назначение имеет каждая составляющая системы.
- Рулевые редукторы делят на группы по мощности движка: до 55 «лошадок» и более. Последние годятся даже на моторы до двухсот лошадиных сил. Правда, в таком случае уместнее будет поставить гидравлическую систему.
- Трос подбирается согласно модели редуктора и параметров лодки. Так, до 55 лошадиных сил подойдет трос марки М58, а выше – М66. Чтобы правильно подобрать его, нужно померить длину от центра редуктора до борта катера, потом до транца (место крепления подвесного мотора) и учесть половину ширины транца. Далее все три цифры складываются и получается результат в метрах. Цифру делят на 0,3 и остается длина в футах.
- Рычаги необходимы для того, чтобы приспособить механическую систему практически к любому движку. Также благодаря им становится возможным управление лодочным мотором в системе, состоящей из нескольких двигателей, но с одним рулевым редуктором.
- Колесо представляет собой отверстие с пазом для сцепления с редуктором. С ними проблем не возникает, поскольку все колеса могут сосуществовать с разными редукторами. Нужно лишь выбрать комплектацию, потому что некоторые производители предлагают колеса без втулок.
Если нет возможности установить механику, то вспоминают о гидравлике. Так бывает при сложном пути прокладки ДУ. Гидравлика лучше, если речь идет о мощном двигателе и точка управления им далека от самого мотора. Она легче и допускает установку «автопилота».
Консоль и приборная панель
- Консоль рулевого управления на надувных лодка с жестким дном легко крепится к днищу болтами и представляет собой два кронштейна с панелью для крепления машинки и руля. Для лодок с мягким дном и небольших размеров консоль крепится на баллон носовой части или одного из бортов.
- Также есть модели консолей для крепления на банку, представляет собой полноценную панель с возможность установки приборов и ветрового стекла. Изготавливается из стеклопластика, имеет малый вес и хороший дизайн с возможность установки в нее эхолота и навигатора. Полноценные панели для установок на лодки с жестким полом может представлять собой пульт совмещенный с креслом для экономии места и большего комфорта.
- Стандартный набор приборов на панели – тахометр со счетчиком моточасов, индикатор уровня топлива и спидометр, показывающий скорость движения лодки относительно воды.
Нелишними будут и различные индикаторы:
- температуры головки блока;
- температуры воды за бортом;
- давления воды в системе охлаждения;
- угла наклона двигателя, а также амперметр и вольтметр.
Есть как универсальные приборы, так и специальные, предназначенные для двигателей определенного производителя или конкретной модели. Эти приборы необходимы в случае использования дорогостоящего двигателя средней и большой мощности, они помогают контролировать условия его работы и избежать перегрева или неожиданной разрядки аккумулятора.
Источник: noiws.ru