Гидролокатор позволяет определять направление движения и расстояние под водой с помощью звуковых волн. Радиолокатор, в основу которого положены те же принципы, использует радиоволны.
Если излучаемые звуковые или радиоволны встречают на своем пути твердый предмет, то они отражаются от него и возвращаются к месту передачи (эхо- V сигнал). Время с момента передачи до приема волны, умноженное на скорость ее распространения, определяет расстояние, пройденное волной. Чаще всего полученное произведение равно удвоенному расстоянию между передатчиком и предметом. Первые радиолокаторы перевозились на тягачах. В некоторых из них лучи фокусировались магнитными линзами.
Во время второй мировой войны английские радиолокационные установки сравнительно небольших размеров входили в систему противовоздушной обороны
Разработка и использование. Первые гидролокаторы, или сонары (от англ, слов Sound Navigation And Ranging), предназначались для обнаружения подводных лодок или предупреждения о встрече кораблей с минными полями, подводными льдинами, затонувшими судами и т.д. Гидролокаторы делятся на «активные» и «пассивные».
Первые, чаще называемые просто гидролокаторами, излучают звуковые волны и улавливают их эхо [1]. С помощью вторых, называемых шумопеленгаторами, удается прослушивать шумы двигателей судов и тем самым определять их местонахождение. Сегодня гидролокаторами оснащены рыболовные суда для поиска косяков рыб и изучения дна океана.
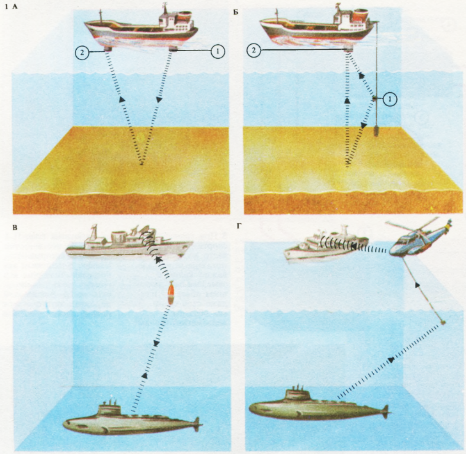
По времени распространения звуковой волны от передающего устройства, находящегося под судном, до дна водоема и обратно до приемного устройства в подводной части судна определяют глубину водоема. Звуковой генератор [1] монтируют в подводной части судна [А]. Отношение сиг- нал/шум (чувствительность микрофона, воспринимающего эхосигнал) [2] можно увеличить, погрузив излучатель звука в воду [Б]; это сокращает расстояние, преодолеваемое звуковой волной.
Для лучшего прослушивания эхосигналов от подводной лодки военные корабли пользуются гидролокаторным буем [В]. При поиске подводных лодок пользуются также гидролокатором, подвешиваемым к вертолету [Г]. Сигналы гидролокатора, принимаемые вертолетом, с помощью коротковолнового передатчика передаются на поисковое судно
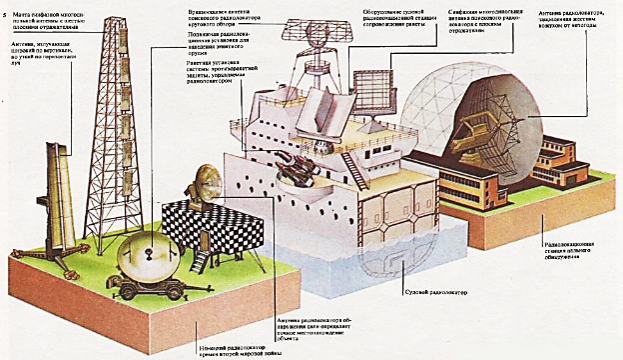
В 1935 г. группа английских ученых во главе с Робертом Уотсоном-Ваттом (1892-1973) приступила к разработке радиолокаторов для военных целей [5], и к началу второй мировой войны Великобритания располагала радиолокационной системой обнаружения самолетов, установленной вдоль восточного, а затем и южного побережья страны. Образовалась система «Обнаружение с помощью радиопоиска», сыгравшая весьма важную роль в противовоздушной обороне Великобритании.
Радиолокатор впервые использовали в 20-х гг. для демонстрации наличия и протяженности ионосферы, которая отражает радиоволны. В 30-х гг. в Великобритании, США, СССР и др. странах были созданы радиолокаторы военного назначения, сыгравшие огромную роль во второй мировой войне. Современные радиолокаторы находят широкое применение в метеорологии, навигации, управлении движением самолетов и различных изыскательских работах.
Лучшие игры про подводные лодки на ПК: крутые симуляторы подводных лодок!
Их используют в системах управления самолетами и противоракетной защиты, в приборах автоматического наведения зенитных орудий, для обнаружения самолетов противника, производящих бомбометание в темноте, и на судах для получения информации о появлении вражеских кораблей в условиях плохой видимости. Радиолокаторы входят в состав бортовой аппаратуры наведения ракет противоракетной обороны
Работа по совершенствованию этой системы была продолжена в США, где появился радиолокатор, получивший новое название-радар (от англ, слов- RAdio Detection And Ran ging),- установка для обнаружения и определения расстояний с помощью радио. Аналогичные исследования в первые годы войны проводились и в Германии, однако с меньшим успехом.
Радиолокационная установка состоит из трех блоков: передатчика, излучающего радиосигналы особой формы; приемника, улавливающего и преобразующего любые отраженные волны, и индикатора, на экране которого оператор может немедленно опознать объект.
Дата добавления: 2022-09-05 ; просмотров: 423 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник: poznayka.org
Что такое гидролокатор?
 Развитие коммерческого, личного, а также военно-морского флота обусловило всплеск разработки и реализации различного судового оборудования. Современные суда сложно представить без наличия должного навигационного оборудования, судовой автоматики и прочих аппаратов. Достаточно внушительное обилие всевозможных приборов и их модификаций порой вызывает сложность в четкой дифференциации даже у моряков. В данной статье мы не будем затрагивать все разнообразие судовой электроники, а сконцентрируем свое внимание на таком внушительном пласте устройств как гидролокаторы.
Развитие коммерческого, личного, а также военно-морского флота обусловило всплеск разработки и реализации различного судового оборудования. Современные суда сложно представить без наличия должного навигационного оборудования, судовой автоматики и прочих аппаратов. Достаточно внушительное обилие всевозможных приборов и их модификаций порой вызывает сложность в четкой дифференциации даже у моряков. В данной статье мы не будем затрагивать все разнообразие судовой электроники, а сконцентрируем свое внимание на таком внушительном пласте устройств как гидролокаторы. 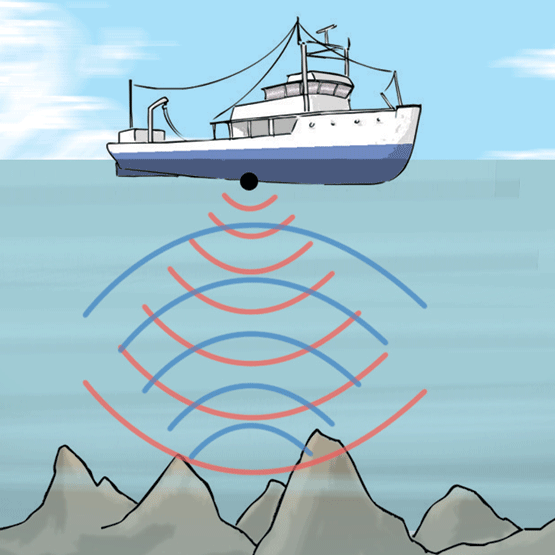 В широком смысле гидролокатор представляет собой устройство акустического обнаружения целей находящихся частично или полностью под водой. Первый гидролокатор был создан в конце первой мировой войны, которая, собственно, и подтолкнула инженеров-разработчиков к поиску различных вариантов навигационных аппаратов, распознающих подводные лодки. Конечно, первый гидролокатор был довольно примитивным устройством, но впоследствии он был существенно доработан, хотя главная цель осталась прежней. Сейчас гидролокатор очень популярен на судах различного масштаба, поскольку его функциональные возможности значительно расширились. К слову, эхолот также является специфическим гидролокатором, задача которого сводится к детальной отрисовке дна, мелких препятствий или косяков рыб. Гидролокатор может быть двух типов в зависимости от используемого принципа работы: активный и пассивный.
В широком смысле гидролокатор представляет собой устройство акустического обнаружения целей находящихся частично или полностью под водой. Первый гидролокатор был создан в конце первой мировой войны, которая, собственно, и подтолкнула инженеров-разработчиков к поиску различных вариантов навигационных аппаратов, распознающих подводные лодки. Конечно, первый гидролокатор был довольно примитивным устройством, но впоследствии он был существенно доработан, хотя главная цель осталась прежней. Сейчас гидролокатор очень популярен на судах различного масштаба, поскольку его функциональные возможности значительно расширились. К слову, эхолот также является специфическим гидролокатором, задача которого сводится к детальной отрисовке дна, мелких препятствий или косяков рыб. Гидролокатор может быть двух типов в зависимости от используемого принципа работы: активный и пассивный. 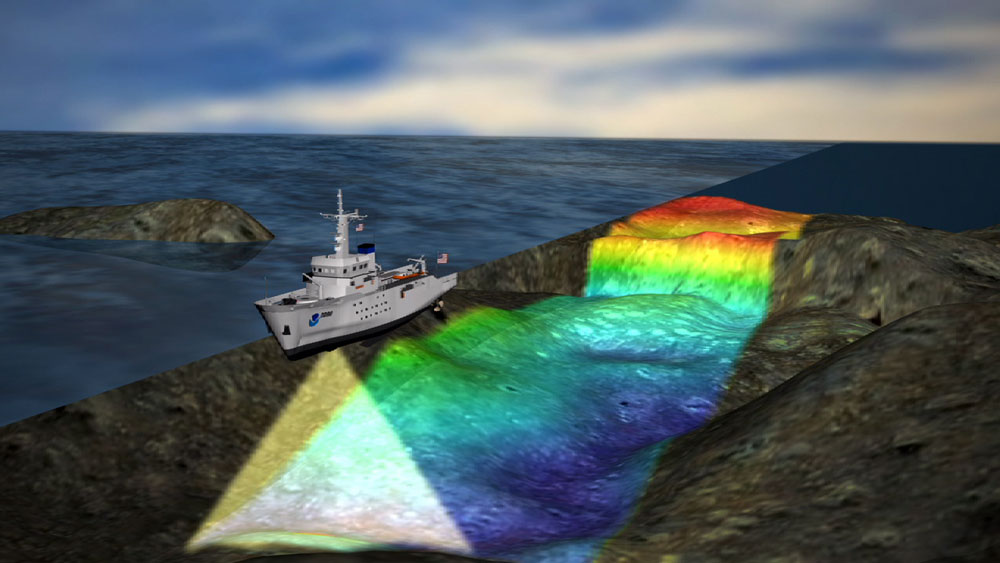
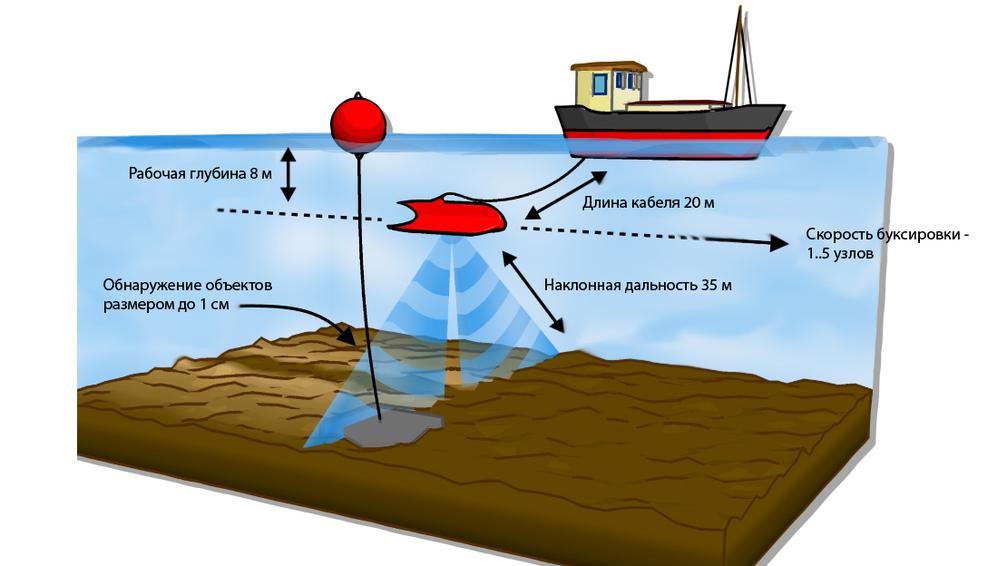 Гидролокатор бокового обзора. Этот прибор чаще всего применяется для тщательного исследования морского дна. Именно поэтому функционально он представляет собой специальный аппарат обтекаемой формы с 2-мя датчиками на каждой из сторон, который буксируется на расстоянии до 50 метров от дна. Каждый датчик покрывает угол обзора примерно в 45º, что в общей сложности дает представление о рельефе дна на значительном расстоянии (около 100 м). ГБО чаще всего используют для вычисления наиболее подходящих мест для прокладки трубопроводов и прочее. Эхолот (Furuno CH-250). Это наиболее популярный в наши дни вид гидролокатора, поскольку он отлично подходит для применения на средних и небольших судах. Задачи у эхолота, как правило, всего две:
Гидролокатор бокового обзора. Этот прибор чаще всего применяется для тщательного исследования морского дна. Именно поэтому функционально он представляет собой специальный аппарат обтекаемой формы с 2-мя датчиками на каждой из сторон, который буксируется на расстоянии до 50 метров от дна. Каждый датчик покрывает угол обзора примерно в 45º, что в общей сложности дает представление о рельефе дна на значительном расстоянии (около 100 м). ГБО чаще всего используют для вычисления наиболее подходящих мест для прокладки трубопроводов и прочее. Эхолот (Furuno CH-250). Это наиболее популярный в наши дни вид гидролокатора, поскольку он отлично подходит для применения на средних и небольших судах. Задачи у эхолота, как правило, всего две:
- составление подробной карты рельефа водоема и промер глубин;
- поиск косяков рыб в толще воды.
Э также имеют множество разновидностей, о которых мы не раз писали в статьях и обзорах.

Профилограф. Он представляет собой узкоспециализированный гидролокатор, который занимается поиском труднораспознаваемых подводных объектов. Данный гидролокатор найдет старый полуразрушенный трубопровод, илистые подводные объекты, а также полезные ископаемые. Чаще всего подобное исследование морского дна применяется с целью экологического мониторинга.
Гидроакустическая система позиционирования. Здесь можно провести аналогию с GPS только в воде. Подобный гидролокатор в состоянии отслеживать движущиеся цели и передавать информацию (траектория, скорость) о них. Эта система помогает ориентироваться водолазам при проведении подводных обследований.
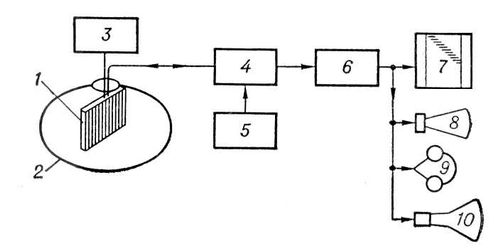
Гидролокатор состоит из нескольких основных элементов. Примерная схема выглядит следующим образом: во-первых, сама акустическая система (1), затем защищающий ее обтекатель (2), устройство для поворота АС (3), коммутатор (4), генератор импульсов (5), усилитель сигнала (6), записывающее устройство (7), а далее идет блок индикаторных устройств, с помощью которых происходит оповещение: рупор (8), телефоны (9) и отметчики (10).
В данной статье гидролокатор был рассмотрен относительно условно, поскольку существует огромное число его разновидностей. Однако, на основе базовой информации можно получить общее представление о строении и предназначении такого устройства, как гидролокатор.
Источник: seacomm.ru
ГИДРОЛОКАТОРЫ
Если гидроакустические шумопеленгаторные станции — одно из основных средств обеспечения боевых действий подводных лодок в подводном положении, то у надводных кораблей они являются вспомогательным.
Https://kazan.chika24.ru/ Элитные проститутки не дорого https://kazan.chika24.ru/. kazan.chika24.ru
Как уже говорилось, шумопеленгаторы работают в пассивном режиме без излучения сигналов. А как обнаружить объект, который не издает никаких шумов и звуков? Эту задачу может выполнить гидролокационная станция, работающая по принципу излучения и приема отраженных от цели звуковых или ультразвуковых (акустических) волн. Измерение времени с момента посылки до возвращения отраженного эхо-сигнала позволяет определить расстояние до цели с учетом того, что общее время нужно разделить пополам, так как сигнал проходит двойное расстояние — до цели и обратно.
Гидролокатор позволяет определить с большой точностью и направление на цель, так как акустические волны излучаются направленно в виде узкого луча.
Гидролокационная станция по устройству значительно сложнее шумопеленгаторной и состоит из следующих элементов (рис. 11): акустическая антенна, подъемно- опускное устройство и поворотное устройство акустической антенны, коммутирующее устройство, генератор, усилитель, пульт управления, рекордер, электронный отметчик, индикаторные приборы (динамик, телефоны).
Акустическая антенна служит для излучения акустических волн и приема отраженных от цели эхо-сигналов. Акустические волны излучаются акустической антенной короткими импульсами. После каждой посылки наступает пауза, во время которой акустическая антенна переключается в режим приема. Таким образом, акустическая антенна обладает обратимым свойством: часть времени она выполняет функции излучателя, а другую, большую часть времени — функции приемника. Есть акустические антенны, у которых передающая и приемная части разделены, т. е. имеются раздельно излучатель — для излучения ультразвуковых волн и приемник — для приема отраженных эхо-сигналов.

Рис. 11. Упрощенная блок-схема гидролокационной станции: 1 — генератор; 2 — автомат посылок; 3 — рекордер; 4 — коммутирующее устройство; 5 — усилитель; 6 — электронный отметчик; 7 — телефоны; 8 — динамик; 9 — акустическая система; 10 — синхронизатор; II — подъемно-опускное и поворотное устройство
Акустические антенны могут быть кругового и направленного действия. Первые применяются для обнаружения подводных объектов, вторые — для определения координат цели (направления, расстояния и глубины погружения). Акустические антенны размещаются в основном у надводных кораблей под днищем, в носовой части, а у подводных лодок — в носовой части, в верхней или нижней части корпуса.
Для уменьшения помех от завихрений во время хода корабля акустическую антенну помещают в обтекатель, толщина стенки которого выбирается такой, чтобы она не препятствовала прохождению акустических волн. При подготовке гидролокатора к работе обтекатель опускается ниже киля, а по окончании работы поднимается вверх в специальный отсек.
Подъемно-опускное устройство предназначено для опускания обтекателя с акустической антенной при включении гидролокатора для поиска подводных целей. Подъемно-опускное устройство состоит из электродвигателя, редуктора, направляющих колонок и пульта управления. Опускать и поднимать обтекатель можно из гидроакустической рубки дистанционно и из гидроакустического отсека посредством электропривода или с помощью аварийно-механического устройства. На последних проектах надводных кораблей иностранных флотов обтекатели акустических антенн имеют бульбообразную форму и располагаются в носовой части. В этом случае в подъемно-опускном устройстве нет необходимости.
Поворотное устройство служит для вращения акустической антенны. Для поиска подводных целей предусмотрено шаговое и круговое вращение. Шаговый поиск применяется, когда известно вероятное направление на цель, т. е. обследуется определенный сектор. Круговой поиск ведется, когда появление цели ожидается с любого направления.
Управление поворотным устройством дистанционное, с пульта управления из гидроакустической рубки. Вращение акустической антенны может производиться вручную или автоматически.
Коммутирующее устройство служит для переключения акустической антенны из режима излучения в режим приема и обратно, т. е. для подключения генератора к антенне в режиме излучения и для подключения антенны к усилителю в режиме приема. Коммутирующее устройство может быть выполнено в виде реле приема-передачи с несколькими группами контактов. Оно действует на электромагнитном принципе работы.
Генератор вырабатывает электрические колебания определенной частоты, которые поступают на акустическую антенну и излучаются в водную среду в виде акустических волн. В первых выпусках использовались машинные генераторы (умформеры), а впоследствии стали применяться ламповые генераторы. Такой генератор имеет несколько каскадов и собран на специальных генераторных лампах большой мощности. Питание анодов, сеток и накалов ламп предусмотрено от специального электрического агрегата.
Усилитель предназначен для усиления и преобразования очень слабых электрических сигналов, поступающих от акустической антенны. Он состоит из нескольких каскадов и собирается на усилительных лампах. Один из каскадов — гетеродин (маломощный генератор), с помощью которого ультразвуковая частота преобразуется в звуковую. С выхода усилителя сигналы поступают на индикаторные приборы.
Рекордер служит для графического воспроизведения отраженных эхо-сигналов, измерения расстояния до цели, определения относительной скорости сближения с целью и выработки данных для атаки подводной лодки. Кроме того, рекордер управляет работой коммутирующего устройства, а следовательно, посылками акустических импульсов.
При включении рекордера подается питание на электромагнитную муфту, которая начинает передвигать каретку слева направо.
В самом начале движения каретка своими контактами замыкает посылочные контакты, через которые и подается питание на реле приема-передачи. Акустическая антенна подключается к генератору. Посылочные контакты замыкаются на незначительное время, в течение которого акустические колебания излучаются в воду.
Каретка продолжает передвигаться с постоянной скоростью, пропорциональной скорости распространения звука в воде. С приходом эхо-сигнала от цели электрический сигнал с акустической антенны через усилитель поступает на перо каретки, через бумагу проходит ток, оставляя на ней темную отметку.
Расстояние от левого края бумаги до отметки соответствует расстоянию до цели в масштабе шкалы, расположенной горизонтально над бумагой. При подходе каретки к правому срезу бумаги замкнутся возвратные контакты, обесточится электромагнитная муфта и каретка возвратится в исходное левое положение. Такие циклы будут повторяться. По характеру записи на бумаге рекордера можно определить, сближается цель или удаляется, а приложив линейку вдоль трассы, установить относительную скорость сближения. Кроме того, по характеру записи можно классифицировать контакт, т. е. отличить настоящую цель от ложной.
Электронный отметчик представляет собой электронно-лучевую трубку с вертикально и горизонтально отклоняющими пластинами, на которые подаются напряжения с выхода двухканального усилителя и генератора пилообразного напряжения.
Вернуться к началу главы .
Источник: zadereyko.info