1 ФГБОУ ВО «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)»
Статья посвящена вопросам подготовки школьников к предметным олимпиадам на примере базового комплекса задач по физике, раздела кинематики равномерного движения. Показано, что научно-образовательные мероприятия характеризуются функцией ориентации на углубленное изучение отдельных предметов, усвоение, расширение, углубление знаний в той или иной предметной области, в смежных областях знаний, адаптацией в сфере профессиональной деятельности и оптимальной самореализации для дальнейшего образования. Приведены примеры задач и их решений с точки зрения различных подходов и методов: относительность движения в кинематике, не ортогональные системы координат в задачах равномерного движения, законы геометрической оптики в задачах равномерного движения. Сделан вывод о том, что организация и проведение олимпиад – это творческий процесс, характеризуемый углубленным изучением отдельных предметов, усвоением и расширением знаний в той или иной предметной области, в смежных областях знаний, адаптацией в сфере профессиональной деятельности и оптимальной самореализации обучающегося для дальнейшего образования.

научно-образовательные мероприятия
кинематика равномерного движения
профориентация
1. Васюков В.И., Дмитриев С.Н., Кузин Е.И. Физика. Три подсказки и любая задача решена. Часть 4. – М.: Учебный центр Ориентир при МГТУ им Баумана, 2002. – 320 с.
2. Задачник по физике / Под общей редакцией О.С. Еркович. – М.: Изд-во Физматгиз, 2014. – 368 с.
3. Зеленцова Н.Ф., Зеленцова Е.В., Зеленцов В.В. Системный подход в решении проблем адаптации студентов младших курсов к учебному процессу в вузе // Наука и образование: научное издание МГТУ им. Н.Э. Баумана. – 2015. – № 11. – С. 671–681.
4. Луценко А.Ю., Кириллов И.В., Струков Ю.А., Хорохоров А.М. Учебное пособие для поступающих в вузы. Физика. 2-е издание. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2013. – 364 с.
5. Орешкина А.К., Цибизова Т.Ю. Развитие преемственности образовательных процессов в системе непрерывного образования. – М.: Изд-во МГОУ, 2010. – 228 с.
6. Цибизова Т.Ю. Концептуальные основания исследовательской деятельности обучающихся в системе непрерывного образования: автореф. дис. … докт. пед. наук / Институт теории и истории педагогики РАО. – М., 2013. – 41 с.
7. Ягодников Д.А., Цибизова Т.Ю. Ранняя профильная ориентация школьников как первая ступень подготовки научных и научно-педагогических кадров инновационной экономики России // Наука и образование: научное издание МГТУ им. Н.Э. Баумана. – 2011. – № 11. – URL http://technomag.edu.ru/doc/228671.html (дата обращения 30.08.2016).
Основы русской инженерной школы закладывались еще в 19 столетии в виде сочетания основательной фундаментальной подготовки и широкого практического обучения. Национальная традиция обеспечения высокого уровня подготовки специалистов сохраняется в технических вузах России и в настоящее время. Более того, сейчас такая традиция становится особо актуальной. Одной из основных проблем управления подготовкой специалистов в вузах становится прогнозируемое снижение количества и качества подготовки выпускников общеобразовательных школ и уже проявляющиеся в связи с этим трудности комплектования контингента учреждений высшего профессионального образования. Наряду с этим возникает проблема адаптации студентов младших курсов к обучению в высшем учебном заведении, преодоления ими, так называемого барьера «школа – вуз» [3].
Прогресс 4 угол наклона транца клин
Государство и общество начинает предъявлять профессиональные требования к молодым людям все в более раннем возрасте. Это значит, что молодой человек, предполагающий добиться определенного социального статуса, должен уже в 14-16 лет определяться в профессиональном выборе. В этих обстоятельствах одной из главных задач высшей школы, заинтересованной в подготовке высококвалифицированных специалистов, становится выявление, обучение, привлечение, поощрение и поддержка научно-ориентированной, склонной к занятиям наукой и к исследовательской работе молодежи [5].
МГТУ им. Н.Э. Баумана в своей деятельности уделяет большое внимание профориентационной работе среди обучающихся средних образовательных учреждений. Для этого в Университете организуется и проводится в целях повышения заинтересованности молодежи в получении инженерного образования комплекс мероприятий, в том числе научно-образовательных [7].
Научно-образовательные мероприятия – олимпиады
Научно-образовательные мероприятия характеризуются функцией ориентации на углубленное изучение отдельных предметов, усвоение, расширение, углубление знаний в той или иной предметной области, в смежных областях знаний, адаптацией в сфере профессиональной деятельности и оптимальной самореализации для дальнейшего образования. К ним относятся интеллектуальные конкурсы, соревнования и состязания, предметные и профильные олимпиады. Данные мероприятия выступают основой воздействия не только на восприятие, память и внимание, а, прежде всего, на творческое, продуктивное мышление обучающихся. Научно-образовательная деятельность обеспечивает оптимальное сочетание самостоятельной поисковой деятельности с усвоением готовых выводов науки, формирует познавательную самостоятельность обучающихся, развитие их логического, рационального, критического и творческого мышления, способствует развитию интеллекта учащегося, его эмоциональной сферы и формированию на этой основе мировоззрения [6].
Много раз меня спрашивали и спрашивают можно ли научить решать задачи. Однозначно – можно, поскольку все мы, по большому счету, устроены одинаково и во всех нас заложено это умение. Надо только захотеть его развить в себе. Осознавая спорность моего утверждения и сложность поставленной задачи, поступим следующим образом.
Я буду показывать вам разные задачи, и рассказывать о возможных методах решений, а вы, исходя из своего опыта и отталкиваясь от моих предложений, выберите свое решение. Надеюсь, вам будет из чего выбрать, поскольку методов много, а примеров их применения еще больше. Некоторые из них на первый взгляд покажутся парадоксальными [1].
Не удивляйтесь этому, поскольку одна из задач, которая неизбежно встанет перед вами – снять с вас накопленные за годы вашей жизни «зашоренность» восприятия физики. Потрясающая интересная сама по себе задача. И освоение законов кинематики как одного из начальных разделов физики – один из лучших способов ее решения.
Примеры задач и методов решений
Начнем с равномерного и прямолинейного движения.
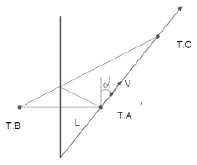
Задача 1. Предположим, что пловцу поставлена задача переплыть реку с минимальным сносом относительно точки старта. Скорость реки – U, скорость пловца в стоячей воде – V (рис. 1). Предположим, что скорость реки по модулю больше скорости пловца, т.е. снос пловца всегда будет, как бы он не плыл.
В реке пловец будет иметь скорость относительно берега VПЛ, которая определяется как сумма собственной скорости пловца и скорости реки: VПЛ = V + U. Вектор U нам известен, а у вектора V нам известен только модуль. Направление мы не знаем, его и надо найти.
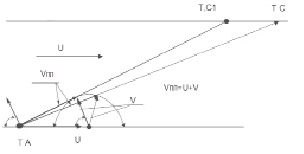
Представим скорость пловца в реке иначе, поменяв местами вектора U и V (от перемены мест слагаемых сумма не изменяется): VПЛ = U + V. Кажется, что ничего не изменилось. Но на самом деле мы практически решили задачу. На рис. 1 точка А – точка старта.
Отложим вектор U и к его концу добавим вектор V, возможные направления которого лежат внутри области ограниченной полуокружностью с радиусом V. Если пловец плывет под некоторым углом к берегу, то сумма скоростей определена вектором АВ, а снос будет определятся координатой точки С. Уменьшить снос можно лишь изменив угол направления движения пловца так, чтобы вектор VПЛ стал касательным к полуокружности с радиусом равным V. Отсюда сразу решение: cos α = V/U. Точка С1 определяет координату минимального сноса ( всегда по модулю ≤ 1 и это было заложено в условие задачи V < U).
Относительность движения в кинематике
Метод, использующий относительность движения, достаточно распространен при решении задач. Суть его в следующем: при выборе системы отсчета вы связываете систему координат с каким-то телом, выбор которого произволен, но чаще всего выбирают неподвижное тело.
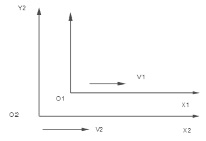
Если выбранное тело движется, то его можно сделать неподвижным, сообщив другим телам, рассматриваемым в данной задаче, относительную скорость V21 = V1 – V2 (см. рис. 2). На рис. 2 показаны два тела О1 и О2, которые двигаются относительно земли со скоростями V1 и V2, т.е. земля является той системой отсчета, относительно которой заданы параметры движения.
Но можно выбрать за базовую систему отсчета систему, связанную с телом О2, которая двигается со скоростью V2. Теперь мы можем ее мысленно остановить, но при этом другим телам необходимо придать относительную скорость V21 – скорость первого тела относительно мысленно покоящегося второго тела: V21 = V1 – V2, или, если складывать скорости: V21 = V1 + (–V2). Не забудем и про землю. Теперь относительно выбранной системы отсчета она должна иметь скорость V23 = О – V2 = – V2.
Рассмотрим эффективность этого метода на примерах.
Задача 2. Тело движется со скоростью U и упруго ударяется со стенкой, которая в свою очередь движется навстречу со скоростью V (рис. 3). Определить скорость тела после удара. Масса стенки значительно больше массы тела.
Решение. Так как мы имеем дело с векторами, обратимся к рис. 3. Скорости заданы в системе отсчета, связанные с землей. Возьмем новую систему отсчета, связанную со стенкой, т.е. остановим стенку. Тогда телу необходимо сообщить относительную скорость VСТ = VT – VC = U – (–V) = U + V.
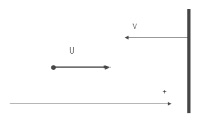
После упругого удара о неподвижную стенку тело будет иметь такую же по модулю, но в обратном направлении скорость относительно стены – (U + V) = VТ – VC = VТ – (VC).
В этом выражении в правой части скорость относительно земли. Неизвестная величина VТ = –(U + 2V).
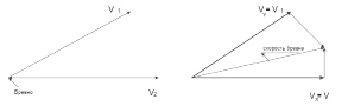
Задача 3. Человек двигаясь по полю со скоростью Vч заметил автобус, который движется по шоссе со скоростью Vа. Координаты человека и автобуса определены. Найти возможные направления движения человека, чтобы выйти к шоссе раньше автобуса.
Решение. Сделаем рис. 4.
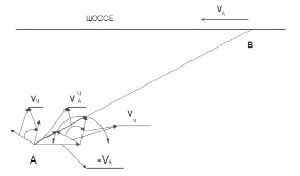
Давайте упростим задачу – остановим автобус. Тогда скорость Vач = Vч – VА должна быть направлена вдоль линии АВ. Перепишем последнее равенство как сумму Vач = – VА + VЧ. Эта скорость имеет направление АВ. Из точки А откладываем вектор (– VА) и суммируем его со скоростью человека, направление которого неизвестно, но их сумма имеет направление АВ. Из рис.
4 видно, что возможные направления движения человека определены углом α. Движение человека внутри этого угла обеспечит решение поставленной задачи.
Можно продолжить примеры использования метода относительного движения, но ничего нового они не добавят к вышеизложенному.
В последнее время на олимпиадах разного уровня, появляются задачи, использующие в своем решении методы исследования функций на экстремум, с этапом дифференцирования [4]. Если функции простые, то взятие производной не вызывает затруднений, но бывают и другие случаи. Я предложу вам способ решения подобных задач без дифференцирования [1].
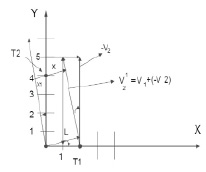
Задача 4. Точки 1 и 2 двигаются равномерно по осям X и Y. В момент времени Т = 0 координата точки 1 – X0 = 2 м, а координата точки 2 – Y0 = 4 м. Первая точка движется со скоростью V1 = 1 м/с, а вторая со скоростью V2 = 5 м/с. Найти наименьшее расстояние между точками.
Решение. Сделаем рис. 5.
Попробуем остановить точку 2. Точка 1 относительно теперь уже покоящейся точки 2 будет иметь скорость V21, направление которой указано на рис. 5. Минимальное расстояние между ними равно величине X. Из очевидных построений имеем ctg α = 5, а искомое X = L – X1 = 2cos α – 4sin α = 1,2 м.
Не ортогональные системы координат в задачах равномерного движения
Метод восстановления скорости по ее проекциям довольно нагляден и прост. Если система координат выбрана ортогональной, то значение скорости по ее проекциям определяется просто (см. рис. 6).
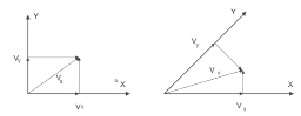
А если система координат не ортогональная? Процедура восстановления скорости V0 остается прежней. А теперь как это использовать при решении.
Задача 5. Два трактора тащат бревно. В некоторый момент времени скорости тракторов равны V1 и V2, как показано на рис. 7. Определить скорость бревна.
Решение. Большинство, кому предлагается эта задача, пытались сложить скорости по правилу параллелограмма. Легко показать, что это ошибочный путь решения. У тела в любой момент времени может быть только одна скорость (если оно движется). В данном случае у тела скорости V1 и V2 являются проекциями реальной скорости V0 на оси X и Y. Применяя вышеописанный метод, легко восстановить скорость бревна по ее проекциям.
Следующая задача аналогична только что рассмотренным, но вызывает затруднение.
Задача 6. Лодку вытягивают из воды через блок, установленный на высоком берегу. Скорость веревки Vв. Определить скорость лодки в момент, когда угол между канатом и лодкой равен ? (см. рис. 8).
Решение. Точка А принадлежит как канату, так и лодке. Лодка очевидно перемещается по оси X со скоростью Vл, а значит и точка А вдоль оси X имеет ту же скорость. Вдоль оси Y эта скорость имеет проекцию Vв, так как точка А принадлежит также и канату. Тогда Vл = Vв / cos α; именно разделить, а не умножить.
Скорость лодки по мере приближения к берегу будет увеличиваться. Опять косоугольная система координат. Но в этом случае, одна из проекций Vx совпадает с искомой величиной Vл.
Применение законов геометрической оптики в задачах равномерного движения
Довольно часто в задачах на равномерное движение используются законы, которые на первый взгляд, не имеют отношения к кинематике равномерного движения [1, 2]. Попробуем более внимательно с этим разобраться. Например, дано условие: ребенок бежит вдоль длинной стенки со скоростью Vр и бросает мяч в стенку со скоростью Vм так, что при последующем движении вдоль стены он ловит отскочивший абсолютно упруго от стенки мяч. Расстояние до стенки L (см. рис. 9).


Точка В – точка встречи ребенка и мяча. При решении обращаю внимание на слова «абсолютно упруго». Это значит, что угол падения мяча равен углу отражения. Используя этот факт, мяч можно бросить (конечно условно) из точки С, являющейся изображением точки А. Стена в этом случае будет играть роль плоского зеркала. А что это дает?
Мы получили прямоугольный треугольник со сторонами СА = 2L, СВ = VмT, АВ = VрT, которые связаны между собой теоремой Пифагора: (Vм T)2 = 4L2 + (VрT)2. Откуда без труда находится неизвестное время T. Зная время, можно выразить любой угол .
Рассмотренный метод поможет нам в решение другой довольно сложной олимпиадной задаче.
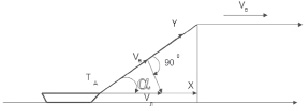
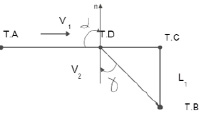
Задача 7. Автомобиль удаляется со скоростью V от длинной стены, двигаясь под углом –α к ней. В момент, когда расстояние до стены равно L, водитель подает короткий звуковой сигнал. Какое расстояние пройдет автомобиль до момента, когда водитель услышит эхо. Скорость звука – С.
Решение. Сделаем рис. 10. Используя метод плоского зеркала, пошлем сигнал из точки В. И далее применим теорему косинусов: C2T2 = V2T2 + 4L2 – 2cos(90 + α) 2L VT, откуда не без труда, но находим Т. Ну а искомое расстояние получим простым произведением V на T.
Законы отражения не единственные из законов геометрической оптики, используемые в разделе кинематика равномерного движения. Законы преломления света также находят свое применение. Например, принцип Ферма: если свет переходит из одной среды в другую, то он распространяется из точки А в точку В за минимальное время. Второй закон преломления позволяет найти соотношение между углами sin α/sin α = V1/V2. Попробуем это применить к следующей задаче.
Задача 8. Автомобиль, двигаясь из точки А, должен попасть в точку В, находящуюся от шоссе в поле на расстоянии L за минимальное время. В какой точке D, находящейся на шоссе, он должен свернуть на поле (см. рис. 11)? Дано AС = L, скорости: V1 и V2, и расстояние ВС.
Решение. Классическое решение подразумевает исследование функции времени на экстремум, т.е. задают значение длины траектории на шоссе и в поле АD = X, DC = L – X. ВС определяют по теореме Пифагора, и далее определяют время движения вдоль этой траектории. Исследуют полученное выражение на экстремум и находят значение X. Это решение имеет право на жизнь при условии умения брать производные. Но, применяя принцип Ферма, эта задача решается намного проще .Если бы свет распространялся из точки А в точку В, то это была бы траектория минимального времени sin 90/sin α = V1/V2, откуда sin α = V2/V1. Дальнейшее определение координаты точки D не вызовет затруднений.
Это далеко не единственная задача, где возможно применение принципа Ферма.
Заключение
Предложенные примеры задач по физике – это далеко не полный спектр возможных решений даже для задач по кинематике равномерного движения. Однако, этот далеко не полный комплекс базовых задач дает представление о том, что проведения олимпиад для школьников – это не заучивание определенных формул и не «натаскивание» на решение однотипных задач, а творческий процесс, характеризуемый функцией ориентации на углубленное изучение отдельных предметов, усвоение, расширение, углубление знаний в той или иной предметной области, в смежных областях знаний, адаптацией в сфере профессиональной деятельности и оптимальной самореализации обучающегося для дальнейшего образования.
Источник: expeducation.ru
Лодку тянут за веревку с крутого берега с постоянной по модулю скоростью д. Найдите зависимость модуля скорости и лодки от угла а
От нашего клиента с логином RczYNyJ на электронную почту пришел вопрос: «Лодку тянут за веревку с крутого берега с постоянной по модулю скоростью д. Найдите зависимость модуля скорости и лодки от угла а» это здание мы отнесли к разделу ЕГЭ (школьный). Так как клиент является зарегистрированным пользователем нашего сайта, то мы бесплатно предоставим ответ.
ЕГЭ (школьный) — довольно сложный раздел, здесь действительно попадаются вопросы, которые даже у специалиста с законченным высшим образованием поставят в тупик при подготовке правильного ответа. Но мы известны тем, что сложности нас не останавливают, а наоборот развивают и расширяют наши знания.
Вы спрашивали Лодку тянут за веревку с крутого берега с постоянной по модулю скоростью д. Найдите зависимость модуля скорости и лодки от угла а? — отвечаем:

ответ к заданию по физике
Источник: xn—-7sbapcyiojdlglffl.xn--p1ai
Как выйти в режим глиссирования: подбор мощности мотора, расчёт скорости, рекомендации
Многие владельцы лодок любят пройтись по воде с ветерком, рассекая волны. А каждый рыбак рано или поздно сталкивается с вопросом, как набрать большую скорость и экономить при этом топливо. На самом деле есть отличное решение для обоих случаев – это режим глиссирования, который активно используется уже давно. Такой режим является доступным для владельцев лодок из ПВХ, катеров, и любых других материалов, на которых установлены достаточно мощные моторы. В этой статье мы подробно расскажем, что такое глиссирование, поговорим о том, как выйти в режим на лодке и рассмотрим возможные проблемы.

Что такое глиссирование
Глиссирование – это такой вариант передвижения плавательного средства по поверхности воды, при котором судно как бы скользит по её поверхности, не раздвигая воду, как при передвижении на небольшой скорости, а удерживаясь на поверхности за счет скоростного напора воды и создаваемой им подъемной силы. Одна из особенностей такого режима передвижения – затраты усилий на выход на глиссирование гораздо больше, чем усилие, нужное для поддержания такого состояния.
Основные условия, необходимые для возникновения глиссирования, это двигатель достаточной мощности и плоское днище плавательного средства. Существенный недостаток такой конструкции – низкая мореходность, особенно при значительном волнении. Частично это исправляется приданием днищу определённой формы, или, как говорят специалисты, килеватости.
Условия глиссирования лодки
Чаще всего судно выходит на глисс, если оно надувное и выполнено из ПВХ.
Такое плавсредство благодаря легкому весу способно скользить даже с маломощным подвесным двигателем от 9,9 лошадиных сил.
Однако мощные моторы с силой тяги от 50 лошадей способны вывести на глиссирование даже каркасную, алюминиевую или стеклопластиковую лодку.
Другое дело, что комфорт и безопасность передвижения на высокой скорости может значительно снизиться.
Впрочем, глиссировка – это довольно азартное занятие на воде, которое зависит от следующих условий:
- Габаритов судна;
- Массы загрузки кокпита;
- Мощности подвесного лодочного двигателя;
- Конструкции плавсредства;
- Глубины водоема;
- Мастерства шкипера.
Глиссирование лодок ПВХ
Поливинилхлоридные надувные лодки, как и любое другое плавательное средство, могут передвигаться по водной поверхности в трёх режимах:
- Водоизмещающий. Скорость передвижения в этом режиме сравнительно небольшая – до 15 км/ч, лодка поднимает высокую волну и кильватерную струю. Именно в этом режиме перемещаются лодки со слабыми моторами. Вследствие большой смачиваемой поверхности и, как результат, относительно большого трения, этот режим является наименее экономичным.
- Переходный. Еще не глиссирование, но водоизмещение лодки уже уменьшается, происходит достаточно сильное приподнимание носовой части плавательного средства. В зависимости от веса лодки переход на этот режим происходит на скорости от 16 до 18 км/ч.
- Глиссирующий. В среднем переход на этот режим передвижения происходит на скорости больше 20 км/ч. Смачиваемая водой поверхность днища лодки достигает на этом режиме минимума, наблюдается снижение нужной на поддержание режима мощности – глиссирующий режим наиболее экономичен. Лодка перестает поднимать высокую волну.
Главная особенность ПВХ лодок заключается в пригодности подавляющего большинства моделей для глиссирующего режима – они легкие, могут оснащаться мощными навесными моторами, а также в большинстве своем имеют плоское дно.
Скорость
Максимально возможную скорость глиссирования для каждого конкретного плавательного средства можно вывести из формулы числа Фруда: Fr= V/√(g*L), под V подразумевается скорость передвижения плавательного средства, g – всем известное ускорение свободного падения, а L- длинна корпуса лодки вдоль ватерлинии.
Как правило, значение числа Фруда для небольших плавательных средств, имеющих возможность перемещаться в глиссирующем режиме, превышает единицу, для водоизмещающих судов оно чаще всего составляет 0,2-0,3.
Минимальная скорость
В зависимости от веса, нагрузки в конкретный момент установленного двигателя и гребного винта, расположения груза, конструкционных особенностей днища конкретного плавательного средства и даже от плотности воды минимальная скорость, необходимая для перехода в глиссирующий режим может несколько меняться.
Лодка не выходит на глиссирование
Причины недоступности для плавательного средства глиссирующего режима могут быть следующими:
- Слишком низкая мощность двигателя. Примерная минимальная необходимая мощность вычисляется из расчета, что на 25 кг веса лодки должна приходиться 1 лошадиная сила мощности мотора.
- Материал изготовления лодки. Плавательные средства из поливинилхлорида требуют от мотора несколько большей мощности, чем, к примеру, цельнопластиковые.
- Неправильный угол наклона двигателя. Оптимальный вариант для большинства лодок и моторов находится в диапазоне 5-15 градусов, меньшее или большее значение угла наклона будет препятствовать переходу лодки на глиссирующий режим передвижения. В целях безопасности регулировка угла наклона выполняется только при выключенном двигателе.
- Неправильно установленный транец. Если гребной винт оказался так высоко, что захватывает лопастями воздух, то ни о каком глиссировании думать не приходится. Если же винт оказывается слишком глубоко, то кроме всего прочего, такая ситуация при достаточной мощности мотора приведёт к переворачиванию лодки.
- Неправильно распределённый груз. Слишком перегруженная корма или один из бортов может стать непреодолимым препятствием при попытке выхода на глиссер.
- Изначально неподходящая для глиссирования форма корпуса лодки.
РИБ
Этот вариант судна более приближен к корпусному, чем надувная ПВХ. Ведь в лодке РИБ жёсткое дно, что позволяет при меньшей мощности мотора выводить её на глиссирование. Хотя все те же составляющие, как и у ПВХ будут актуальны и для РИБ.
Существует формула для расчета выхода на глиссер, она довольно сложная, так как помимо мощности двигателя, веса лодки, надо учитывать встречный ветер, коэффициент трения, возвышение или погружение лодки. Самый примитивный расчет, это соотношение мощности мотора к общему весу, находящемуся на судне, примерно 25 кг веса на 1 л.с.
Народная примета: Если у вас плохое настроение перед рыбалкой, то не ждите хорошего результата!
Как улучшить
Существует несколько способов, позволяющих улучшить выход плавательного средства на глиссирующий режим передвижения:
- Распределение нагрузки лодки. Если основной вес перевозимого груза приходится на нос плавательного средства, то переход на глиссирующий режим будет осуществляться быстрее.
- Максимально снизить вес лодки.
- Немного нестандартная установка антикавитационной плиты. По инструкции эта плита должна быть установлена параллельно днищу, на расстоянии 30-50 см. Если установить ее немного ближе, то это может немного увеличить скорость, и, как следствие, ускорить выход на глиссер.
- Гребной винт. Несоответствие гребного винта мотору и лодке может приводить не только к ускоренному износу двигателя, но и к проблемам при передвижении.

Можно попробовать поискать гребной винт с большим дисковым отношением, например, четырехлопастной.
В случае если причиной плохого, неполного или долгого выхода лодки на глиссирующий режим является гребной винт, можно предложить следующие варианты:
- Если у разогнанной до максимума лодки показатели тахометра ниже, чем рекомендованные в инструкции к мотору, то следует подобрать винт с меньшим шагом, это не только продлит срок службы двигателя, но и несколько улучшит динамические характеристики.
- Заменить лёгкий пластиковый или алюминиевый гребной винт на стальной, желательно с хорошей полировкой. Правда, у винтов из стали и нержавейки есть существенный недостаток – если лопасть такого винта ударяется о что-нибудь, то есть риск повреждения редуктора.
- Если позволяет мощность подвесного мотора, то возможна установка гребного винта большего диаметра, но следует помнить, что при эксплуатации слишком большого винта многократно возрастает вероятность повреждения редуктора.
Как выйти на глиссирование на лодке ПВХ
Выйти в режим глиссирования на ПВХ лодке достаточно легко. Однако следует придерживаться некоторых правил.
Очень важно равномерно распределить груз на лодке. Если центр масс будет на корме, то мотор будет зарываться под лодку. Его мощности в таком случае не будет хватать. А если резко дать полный газ на достаточно мощном моторе, то лодка может даже перевернуться.
Так как ПЛМ – один из самых тяжёлых элементов лодки, и центр масс по умолчанию смещён к корме, то рекомендуется все грузы переместить ближе к носу. При этом стоит учитывать и массу собственного тела, ведь вы тоже будете находиться на корме. Вы можете отсесть чуть дальше от мотора, а чтобы дотягиваться до него – использовать удлинитель румпеля.
Противоположный случай – когда развесовка слишком сильно смещена к носу. Нос должен немного подняться над водой. В противном случае центр масс будет тянуть нос ко дну, именно это не позволит оторваться от воды и уменьшить трение.
Когда вы равномерно распределите массу, отойдите от берега на безопасное расстояние. Важно выбрать прямой курс. И помните о том, что сильные волны и порывы ветра могут усложнить задачу. Если ничего не мешает, необходимо постепенно перейти на «Полный газ». Нос ПВХ лодки должен оторваться от воды, затем можно плавно сбавить газ.
Стоит помнить о том, что мотор должен быть подобран так, чтобы его мощности хватало. Сбрасывать газ в первое время стоит медленно, чтобы вы для себя могли понять, какой мощности будет достаточно для режима глиссирования.
Есть и несколько рекомендаций, которые помогут выйти в режим глиссирования без проблем:
- Если вы пытаетесь все сделать в первый раз, не стоит давать полные обороты мотора сразу. Лучше провести несколько экспериментов, чтобы вы смогли прочувствовать лодку.
- Гребной винт не должен быть слишком глубоко – это будет создавать дополнительное трение, а если он будет на поверхности, вы не сможете набрать скорость.
- Расположение груза. Всегда обращайте внимание на то, где находится груз. Старайтесь создать равномерную развесовку.
- После входа в глиссирование не стоит резко дергать руль. Это приведет к потере равновесия, да и в режим придется выходить снова. Управлять рекомендуем учиться постепенно, методом проб и ошибок.
- Первые разы пытайтесь снизить вес лодки к минимуму. Это поможет вам понять суть, да и войти в глиссер будет проще.
Расчёт мощности мотора для выхода на глиссер
Можно выделить достаточно простую формулу, которая позволит подобрать мотор для выхода на глиссер. На каждые 100 кг веса (учитывая лодку и мотор) необходимо 5 лошадиных сил. Делаем расчет для примера: два пассажира со снаряжением весят 180 кг, для выхода в глиссер понадобится мотор мощностью 10 л.с.

Что такое глиссирование
Не отвечая за точность определения, скажу, что скольжение лодки по воде скачками, то отрываясь, то ударяясь об воду в заданном направлении, это и есть глиссирование. Напор воды удерживает судно на поверхности.
Более уверенно выходят на глиссер катера и лодки с жестким корпусом. Именно для них были проведены все расчеты и исследования.
Но и надувные ПВХ-шки хорошо скачут по воде при соблюдении баланса между характеристиками седока, лодки, мотора. Хотя научной базы для определения поведения этих транспортных средств в режиме глиссирования нет.
Надувные лодки ПВХ и судна с жёстким корпусом ведут себя по-разному выходя в режим глиссирования. Различают три способа движения лодки с мотором:

- Водоизмещение. Если скорость не более 10 км/час, то это точно не глиссер, даже если у вас корма опущена вниз. Просто при неверном распределении нагрузки лодка будет задней частью опускаться в воду, а нос будет задран. Такого положения можно избежать, правильно распределив нагрузку и отрегулировать установку мотора на транце.
- Переходный режим. В этом режиме начинается проседание кормы, скорость судна около 16 км в час.
- Глиссирование. Начинается со скоростью 18-20 км/ час и достигает наилучшего уровня при скорости с 25 — 28 км/час (в зависимости от всех параметров). Лодка, начинает свой полёт над водой, периодически от неё отталкиваясь. При этом она меняет угол наклона над водой, принимает почти горизонтальное положение. Только треть корпуса не соприкасается с водой, она скользит.
Минимальная скорость
Число Фруда ещё и избыточно. Проще запомнить, что небольшие и средние лодки ПВХ или катера могут войти в режим глиссирования на скорости 18-20 км/ч. Эта скорость может быть и выше или чуть ниже, однако здесь все зависит от технических особенностей каждой модели. Также на минимальную скорость влияет:
- Вес груза.
- Где расположен груз (центр массы).
- Конструктивные особенности днища.
- Угол наклона мотора, глубина погружения винта, наличие антикавитационной пластины.
- На скорость влияет плотность воды и течение.
Соответственно, если мы говорим про небольшие и легкие плавательные средства, то им выйти в такой режим гораздо проще. А вот те, кто из-за массы или размера создают значительное сопротивление, войти в глиссирование могут с трудом.

Условия выхода на глиссер
Расчет выхода в режим глиссирования ведётся из соотношения веса лодки (вместе с пассажирами) и мощности мотора, определяемой в лошадиных силах. Но это лишь приблизительные отправные величины. В реальной жизни большое влияние оказывает форма плавательного средства: жёсткость пола, объём баллонов, конфигурация киля, правильность распределения груза по кокпиту.
Для надувных лодок ПВХ большое значение для глиссирования имеет длина, чем больше длина, тем легче выход. Более длинные надувные ПВХ лодки при одинаковой мощности мотора развивают большую скорость, а высокая скорость очень важный параметр.
Мощность мотора
Главным условием выхода в глиссирующий режим, это возможность мотора вывести вашу лодку на скорость 25 км/час. Если этого сделать невозможно, то нельзя сказать, что лодка двигается в этом режиме, а лишь в переходном. Вы сами почувствуете переход на глиссер, когда без прибавления газа, начнут прибавляться сами обороты.

Выход лодки на глиссер
При даже небольшом волнении на средних и крупных водоемах и особенно открытых акваториях, для глиссирования у лодки должно быть днище с переменной килеватостью. В носовой части имеем ярко выраженную V-образную форму днища, которая плавно переходить в почти плоскую поверхность ближе к транцу.
Такая конструкция значительно увеличивает мореходность и снижает ударные нагрузки на корпус во время прохождения волн, т.к. такой нос у лодки рассекает волну. Но и корму нельзя делать полностью плоской иначе это приведет к увеличению рыскания и снижению устойчивости лодки на курсе. Резкие повороты при таком раскладе попросту будут противопоказаны. Но чем большая килеватость на транце, тем менее глиссирующая будет лодка.
Водоизмещающее днище лодки имеет выраженную килеватость на всем своем протяжении. На глиссирование она выйти уже не сможет из-за отсутствия плоскости в кормовой части, которая должна выполнять роль крыла. Такой тип лодок уже раздвигает волны, а не скользит по ним. У водоизмещающего корпуса есть предел максимально скорости, который высчитывается по формуле “Числа Фруда”.

V) Скорость судна в м/с; g) 9,81 м/с в кв. – ускорение силы тяжести; L) Длина корпуса по ватерлинии в м.
Длина корпуса судна напрямую влияет на максимальную скорость при водоизмещающем передвижении. Образование волн “съедает” бОльшую часть энергии. Фактически, при одинаковой скорости движения рыболовная лодка длиной 4 метра создает волну такой же длины, что и океанский круизный корабль, у которого длина может быть больше 200 метров. Чем больше скорость, тем длиннее волна.
При достижении предела скорости судно окажется между двух волн в момент всхода на носовую. Увеличивать дальше скорость смысла уже не будет, т.к. это только приведет к увеличению расхода топлива и дифферента на корму, т.к. высота волны будет большая. Судно длиннее к примеру в 3 раза при такой же скорости будет идти на 3-х волнах и ему еще можно наращивать скорость до тех пор пока вол не станет две, одна на носу, другая на корме, достигнув при этом своего предела скорости. А вот если лодка/судно будет иметь глиссирующую форму корпуса и мотор будет достаточной мощности, то она сможет перейти через гребень волны и выйти на глисс.
Для выхода лодки на режим глиссирования надо 1 л.с. на каждые 25 кг. груза
Что мы имеем на практике исходя их теории. Если лодка имеет ярко выраженную килеватость, то вес на 1 л.с. снижается до 20 кг. Все это конечно примерно, т.к. в большей степени глиссирование зависит от конструкции корпуса лодки, материала лодки, мощности и типа мотора, гребного винта, угла установки мотора и развесовки груза в лодке. Для наглядности скажем, что надувная лодка требует более мощного мотора нежели пластиковая при общих равных условиях. Для улучшения глиссирования на корпуса могут быть установлены продольные реданы, транцевые пластины и т.п. улучшения.
Если суммировать все вышесказанное и добавить сюда нашу практику испытаний глиссирующих пвх лодок то можно сделать следующие выводы в виде таблицы:
| Длина лодки (м.) | Базовая загрузка (кг.) | Мощность мотора для выхода на глиссер (л.с.) | Мощность для каждого доп. пассажира (л.с.) | Пример |
| 3-3,3 | 80 | 5 | 3 | 3-х метровая лодка с двумя людьми на борту должна выйти на глиссирование с лодочным мотором в 8 л.с. |
| 3,4-3,6 | 80 | 8 | 5 | Лодка 3,6 м длинной в тремя людьми на борту должна выйти на глиссирование с мотором не менее 18 л.с. |
| 3,6-4 | 80 | 10 | 5 | Лодка 3,8 м с тремя людьми на борту выйдет на глиссер с мотором 20 л.с. |
Изначально считалось, что в лодке один только водитель весом 80 кг., без дополнительного груза. Каждый дополнительный пассажир также среднего веса в 80 кг.
Если говорить о лодках длиннее 4-х метров, что для надувной уже слишком много, то мотора уже нужен будет не менее 25 л.с.
Небольшой совет. Если вы планируете покупать надувную лодку под использование лодочного электромотора, то рассматривайте лодки с навесным транцем. Вклеенный транец, а точнее плоскость под ним предназначена для глиссирования, а при водоизмещающем режиме использования лодки будет создаваться излишнее разряжение на корме, которое будет препятствовать движению. Корпус с навесным транцем лучшим образом подходит под электромоторы.
Что такое глиссирование: необходимые условия, режимы, как улучшить выход на глиссер?
Выход на глиссер сравнительно новый режим передвижения лодок. Это понятие знакомо людям с детства и сравнимо с запуском камня по воде.

Для такого развлечения обычно выбирали камни с плоскими сторонами. Этот пример подходит для описания процесса глиссирования лодки. Для правильного вхождения на глиссер необходимо знать основные моменты, с которыми можно столкнуться, практикуя такой режим.
Источник: divebay.ru