Любое физическое явление или процесс в окружающем нас материальном мире представляет собой закономерный ряд изменений, происходящих во времени и пространстве. Механическое движение, то есть изменение положения данного тела (или его частей) относительно других тел, – это простейший вид физического процесса. Механическое движение тел изучается в разделе физики, который называется механикой . Основная задача механики – определить положение тела в любой момент времени .
Одна из основных частей механики, которая называется кинематикой , рассматривает движение тел без выяснения причин этого движения. Кинематика отвечает на вопрос: как движется тело? Другой важной частью механики является динамика , которая рассматривает действе одних тел на другие как причину движения. Динамика отвечает на вопрос: почему тело движется именно так, а не иначе?
Механика – одна из самых древних наук. Определенные познания в этой области были известны задолго до новой эры (Аристотель (IV век до н. э.), Архимед (III в. до н.э.)). Однако, качественная формулировка законов механики началась только в XVII веке н. э., когда Г. Галилей открыл кинематический закон сложения скоростей и установил законы свободного падения тел. Через несколько десятилетий после Галилея великий И. Ньютон (1643–1727) сформулировал основные законы динамики.
Способы описания движения. Траектория. Путь. Перемещение
В механике Ньютона движение тел рассматривается при скоростях, много меньше скорости света в пустоте. Ее называют классической или ньютоновской механикой в отличие от релятивистской механики, созданной в начале XX века главным образом благодаря работам А. Эйнштейна (1879–1956).
В релятивистской механике движение тел рассматривается при скоростях, близких к скорости света. Классическая механика Ньютона является предельным случаем релятивистской при .
Кинематика
1.1. Основные понятия кинематики
Кинематикой называют раздел механики, в котором движение тел рассматривается без выяснения причин, его вызывающих.
Механическим движением тела называют изменение его положения в пространстве относительно других тел с течением времени.
Механическое движение относительно . Движение одного и того же тела относительно разных тел оказывается различным. Для описания движения тела нужно указать, по отношению к какому телу рассматривается движение. Это тело называют телом отсчета .
Система координат, связанная с телом отсчета, и часы для отсчета времени образуют систему отсчета , позволяющую определять положение движущегося тела в любой момент времени.
В Международной системе единиц (СИ) за единицу длины принят метр , а за единицу времени – секунда .
Всякое тело имеет определенные размеры. Различные части тела находятся в разных местах пространства. Однако, во многих задачах механики нет необходимости указывать положения отдельных частей тела. Если размеры тела малы по сравнению с расстояниями до других тел, то данное тело можно считать его материальной точкой . Так можно поступать, например, при изучении движения планет вокруг Солнца.
Траектория, материальная точка
Если все части тела движутся одинаково, то такое движение называется поступательным . Поступательно движутся, например, кабины в аттракционе «Колесо обозрения», автомобиль на прямолинейном участке пути и т. д. При поступательном движении тела его также можно рассматривать как материальную точку.
Тело, размерами которого в данных условиях можно пренебречь, называется материальной точкой .
Понятие материальной точки играет важную роль в механике.
Перемещаясь с течением времени из одной точки в другую, тело (материальная точка) описывает некоторую линию, которую называют траекторией движения тела .
Положение материальной точки в пространстве в любой момент времени ( закон движения ) можно определять либо с помощью зависимости координат от времени , , (координатный способ), либо при помощи зависимости от времени радиус-вектора (векторный способ), проведенного из начала координат до данной точки (рис. 1.1.1).
Определение положения точки с помощью координат , и и радиус-вектора . – радиус-вектор положения точки в начальный момент времени
Перемещением тела называют направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением. Перемещение есть векторная величина.
Пройденный путь равен длине дуги траектории, пройденной телом за некоторое время . Путь – скалярная величина.
Если движение тела рассматривать в течение достаточно короткого промежутка времени, то вектор перемещения окажется направленным по касательной к траектории в данной точке, а его длина будет равна пройденному пути.
В случае достаточно малого промежутка времени пройденный телом путь почти совпадает с модулем вектора перемещения При движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути (рис. 1.1.2).
Пройденный путь и вектор движении тела. и – начальная и конечная точки пути
Для характеристики движения вводится понятие средней скорости :
В физике наибольший интерес представляет не средняя, а мгновенная скорость , которая определяется как предел, к которому стремится средняя скорость на бесконечно малом промежутке времени :
В математике такой предел называют производной и обозначают или
Мгновенная скорость тела в любой точке криволинейной траектории направлена по касательной к траектории в этой точке. Различие между средней и мгновенной скоростями показано на рис. 1.1.3.
Средняя и мгновенная скорости. , , – перемещения за времена соответственно. При
При движении тела по криволинейной траектории его скорость изменяется по модулю и направлению. Изменение вектора скорости за некоторый малый промежуток времени можно задать с помощью вектора (рис. 1.1.4).
Вектор изменения скорости за малое время можно разложить на две составляющие: направленную вдоль вектора (касательная составляющая), и направленную перпендикулярно вектору (нормальная составляющая).
Изменение вектора скорости по величине и направлению. – изменение вектора скорости за время
Мгновенным ускорением (или просто ускорением ) тела называют предел отношения малого изменения скорости к малому промежутку времени , в течение которого происходило изменение скорости:
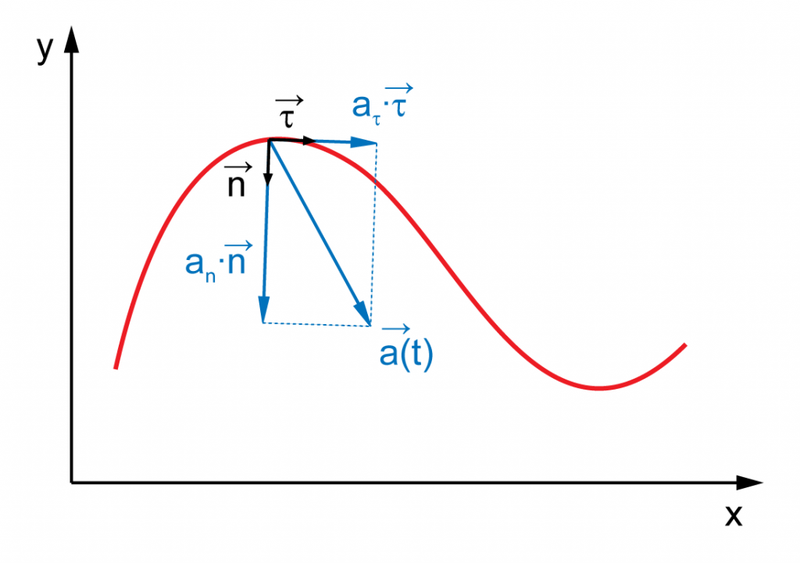
Направление вектора ускорения в случае криволинейного движения не совпадает с направлением вектора скорости Составляющие вектора ускорения называют касательным ( тангенциальным ) и нормальным ускорениями (рис. 1.1.5).
Касательное и нормальное ускорения
Касательное ускорение указывает, насколько быстро изменяется скорость тела по модулю:
Вектор направлен по касательной к траектории.
Нормальное ускорение указывает, насколько быстро скорость тела изменяется по направлению.
Криволинейное движение можно представить как движение по дугам окружностей (рис. 1.1.6).
Движение по дугам окружностей
Нормальное ускорение зависит от модуля скорости и от радиуса окружности, по дуге которой тело движется в данный момент:
Вектор всегда направлен к центру окружности (см. §1.6).
Из рис. 1.1.5 видно, что модуль полного ускорения равен
Таким образом, основными физическими величинами в кинематике материальной точки являются пройденный путь , перемещение , скорость и ускорение . Путь является скалярной величиной. Перемещение , скорость и ускорение величины векторные. Чтобы задать векторную величину, нужно задать ее модуль и указать направление. Векторные величины подчиняются определенным математическим правилам. Вектора можно проектировать на координатные оси, их можно складывать, вычитать и т. д.
Источник: physics.ru
Траектория точна
Движущаяся точка занимает ряд непрерывно сменяющихся промежуточных положений; ее движение образует непрерывную линию — траекторию. При движении точки ее координаты изменяются. Они становятся больше или меньше, могут менять знак на обратный.
Изменение координат точки определяет направление и величину перемещения
При постоянном направлении движения траектория по форме представляет прямую линию (прямолинейное движение 2); при переменном направлении — кривую (криволинейное движение).
Длину траектории (расстояние вдоль нее) характеризует путь точки. При прямолинейном движении для определенного участка траектории (прямой линии) измеряют его длину.
При криволинейном движении вектор перемещения — хорда участка криволинейной траектории—не совпадает с траекторией. Малое перемещение, при котором можно с необходимой степенью точности заменить малый участок траектории ее хордой, условимся называть элементарным перемещением (ds).
При криволинейном движении путь точки равен арифметической сумме модулей ее элементарных перемещений; перемещение же точки равно геометрической сумме ее элементарных перемещений.
Форму криволинейного движения характеризует кривизна траектории (k). Это величина, обратная радиусу кривизны траектории (R), т. е. радиусу такой элементарной дуги окружности, которой допустимо заменять соответствующий элементарный участок траектории: k=1/R
Следовательно, чем больше радиус такой дуги, тем меньше кривизна траектории.
Для траектории любой формы определяют такжеееориентацию в пространстве: для прямой траектории — по координатам точек начального и конечного положений, для кривой — по координатам этих двух точек траектории и третьей точки, не лежащей с ними на одной прямой.
При поступательном движении тела у всех его точек траектории одинаковые. По траектории одной точки (например, ОЦТ) можно изучить движение тела. При вращательном движении тела у каждой его точки свой след в пространстве, хотя у точек с одинаковым радиусом траектории по форме одинаковы. Здесь движение всего тела (только когда оно простое вращательное) также можно изучить, определив по траектории одной точки угол поворота тела.
При движении же биомеханической системы надо определить траектории точек ее звеньев, а также траекторию ее ОЦТ.
Траектории точек каждого звена относительно оси сустава можно приближенно считать дугами окружностей. Однако относительно осей соседних суставов или системы прямоугольных координат, связанной, например, с Землей, траектории точек имеют сложные и разнообразные формы. Лишь иногда движения точек плоские. Почти всегда пространственные (трехмерные) траектории кривые. Они, как правило, исключительно сложны для составления уравнений, описывающих закон движения3.
Таким образом, все пространственные характеристики — координаты, перемещения и траектории — в совокупности определяют начало и окончание движения и его форму в пространстве.
Источник: studopedia.ru
Основы механики для чайников. Часть 1: Кинематика

В прошлой статье мы немножко разобрались с тем, что такое механика и зачем она нужна. Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Присоединяйтесь к нам в телеграм и получайте ежедневную рассылку с полезной информацией по актуальным студенческим вопросам.
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют. Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно.
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется. Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие.
Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Перемещение и путь
Тело переместилось из точки А в точку Б. При этом перемещение тела – отрезок, соединяющий данные точки напрямую – векторная величина. Путь, пройденный телом – длина его траектории. Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.
В системе СИ перемещение и длина пути измеряются в метрах.
Перемещение равно разнице радиус-векторов в начальный и конечный моменты времени. Другими словами, это приращение радиус вектора.
Скорость и ускорение
Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
А теперь представим, что промежуток времени уменьшается, уменьшается, и становится совсем коротким, стремится к нулю. В таком случае о средней скорости говорить на приходится, скорость становится мгновенной. Те, кто помнит основы математического анализа, тут же поймут, что в дальнейшем нам не обойтись без производной.
Мгновенная скорость – векторная физическая величина, равная производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду
Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение.
Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное.
Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторы нормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка.
Здесь R – радиус окружности, по которой движется тело.
Закон равноускоренного движения
Рассмотрим далее закон равноускоренного движения, то есть движения с постоянным ускорением. Будем рассматривать простейший случай, когда тело движется вдоль оси x.
Здесь — x нулевое- начальная координата. v нулевое — начальная скорость. Продифференцируем по времени, и получим скорость
Производная по скорости от времени даст значение ускорения a, которое является константой.
Пример решения задачи
Теперь, когда мы рассмотрели физические основы кинематики, пора закрепить знания на практике и решить какую-нибудь задачу. Причем, чем быстрее, тем лучше.
Кстати! Для всех наших читателей сейчас действует скидка 10% на любой вид работы.
Решим такую задачу: точка движется по окружности радиусом 4 метра. Закон ее движения выражается уравнением S=A+Bt^2. А=8м, В=-2м/с^2. В какой момент времени нормальное ускорение точки равно 9 м/с^2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.
Нужна помощь в решении задач? Профессиональный студенческий сервис готов оказать ее.
Источник: zaochnik.ru
Описание траектории свободной материальной точки
Траектория физической точки — линия в пространстве, описывающая движение тела; представляет собой некоторое множество точек, через которые проходили, проходят или будут проходить материальные точки в процессе перемещения в пространстве в соответствие с выбранной системой отчета.
Примечание 1
Термин «траектория» будет иметь свой физический смысл даже в тех случаях, когда никакого движения по ней не происходит.
Траектория в случае наличия движущегося по ней объекта, изображаемая в заданной ранее системе пространственных координат, ничего не говорит относительно причин движения этого объекта, пока не будет проведен анализ конфигурации поля и воздействующих на него в данной системе координат сил.
Форма определенной траектории напрямую связана с конкретной системой отчета, в которой происходит описание движения.
Можно говорить о наблюдении некой траектории при абсолютной неподвижности предметаобъекта, но в таком случае будет происходить движение самой системы отсчета. Пример
Примером такой системы может быть звездное небо. Данная система инерциальная и неподвижна. Однако при длительном рассмотрении звезды в звездном небе будут двигаться по траектории круга.
Бывают и случаи, когда объект движется, но его траектория в проекции на плоскость наблюдения сама по себе представляется неподвижной точкой. Определение 2
Перемещение точки за некоторый временной промежуток — направленный отрезок прямой, его начало полностью совпадает с начальным положением точки, а ее конец совпадает с конечным положением точки.
Перемещение точечного объекта может определяться только начальной и конечной координатами объекта, оно не зависит от того, каким образом передвигалось тело в течение рассматриваемого временного промежутка. Определение 3
Путь — определенная длина траектории, пройденная объектом; расстояние, которое проходит точечное тело за определенный временной промежуток.
В случае, если объект в процессе своего движения не изменяет своего направления движения, то путь, который пройден данным телом, будет равен модулю перемещения данного тела. Если же тело, наоборот, изменяло свое направление в течение определенного временного промежутка, то путь будет больше модуля перемещения тела, а также модуля изменения координаты данного тела.
Путь — величина всегда неотрицательная. Он может быть равен нулю только тогда, когда тело находилось в покое в течение определенного временного промежутка.
- Если объект совершает движение вдоль прямой, то такое движение называется прямолинейным. Траектория в таком случае является прямым отрезком.
- Если траектория представляет собой кривую линию, то такое движение можно назвать криволинейным.
Чтобы описание положение определенного объекта в пространстве нужно:
- Выбрать тело отсчета, а также начало отсчета на нем.
- Связать с телом отсчета координатную ось, которая проходила бы через начало отсчета в определенном направлении, а также указать единицу длины.
Расстояние от начала отсчета до определенного тела, выраженное в выбранных единицах длины, а также взятое с соответствующим знаком, обычно называют координатой данного тела.
Форма определенной траектории напрямую связана с тем, какую систему отсчета выбирает человек. В различных системах отсчета траектории представлены самыми разными линиями — они могут быть как прямыми, так и кривыми.
При движении точки, обладающей постоянным ускорением, можно представить следующее уравнение: r ¯ ( t ) = r 0 ¯ + v 0 ¯ t + a ¯ t 2 2 ( 1 )
В данном уравнении r ¯ ( t ) является радиусом-вектором определенной точки в определенный момент времени, v 0 ¯ будет определять начальную скорость передвижения точки, a ¯ является показателем ускорения данной точки.
Траектория такого движения будет представлять плоскую кривую, а это значит, что все точки данной кривой расположены на одной плоскости. Положение данной плоскости в пространстве задается векторами ускорения, а также начальной скорости.
Ориентация координатных осей выбирается обычно так, чтобы плоскость движения полностью совпадала с хотя бы одной из координатных плоскостей. В таком случае векторное уравнение (1) возможно свести к двум скалярным уравнениям.
Уравнение траектории движения
Давайте посмотрим на свободное движение объекта рядом с поверхностью планеты Земля. Начало координат будет находиться в точке выброса тела, а оси координат будут направлены так, как показано на рисунке ниже:
В таком случае уравнение движения данного тела (1) в проекции на координатные оси в декартовой координатной системе будет состоять из двух уравнений:
Для того чтобы получилось уравнение для траектории движения объекта y = y ( x ) , необходимо исключить из нее время движения тела из уравнений (2) и (3). Попробуем выразить из уравнения (2) время и поставить его в уравнение (3), тогда получаем:
t = x v 0 cos α ; y = v 0 x v 0 cos α sin α — g 2 ( x v 0 cos α ) 2 → y = x tan α — g x 2 2 v 0 2 cos 2 α ( 4 )
Уравнение (4) является уравнением для параболы, проходящей через начало координат. Ветви данной параболы будут направлены вниз, потому что коэффициент x 2 меньше нуля.
Вершина данной параболы будет находиться в точке с такими координатами:
Определить координаты вершины траектории возможно при помощи существующих правил исследования функции на экстремум. В таком случае максимум функции y(x) будет определяться, если приравнять к нулю производную d y d x от функции по x.
Положение объектов в системе отсчета возможно определить разными способами. В соответствии с данными способами можно описать и движение объекта или точки.
1. Координатная форма описания движения.
Сначала делаем выбор координатной системы. В данной системе положение точки будет характеризоваться тремя координатами (при условии трехмерного пространства).
Этими координатами могут быть x 1 = x , x 2 = y , x 3 = z в условиях декартовой координатной системы.
Координаты x 1 = ρ , x 2 = ϕ , x 3 = z в условиях цилиндрической системы.
В процессе перемещения точки координаты служат функциями времени. То есть описать движение одной точки — значит, указать данные временные функции:
x 1 = x 1 ( t ) ; ; x 2 = x 2 ( t ) ; ; x 3 = x 3 ( t ) ( 6 ) .
2. Описание движения в форме вектора.
В данных условиях положение объекта будет задаваться радиусом-вектором r ¯ по отношению к такой точке, которую воспринимают как начальную.
В данном случае вводят определенную точку отсчета. В процессе перемещения объекта вектор r ¯ изменяется. Конец данного вектора описывает траекторию. Движение будет задаваться следующим уравнением:
3. Третий способ описания изменения движения точки — описание при помощи параметров траектории.
Путь является скалярной величиной, равной длине траектории.
Если траектория уже задана, то обычно задачу по описанию движения сводят к определению закона движения вдоль нее. При этом выбирают начальную точку траектории. Любую иную точку будут характеризовать расстоянием s по траектории от начальной точки. Так движение будет описываться уравнением:
Представим, что по окружности с радиусом R равномерно движется точка. Закон движения для данной точки по окружности будет описываться в данном методе как:
- s — путь точки по траектории;
- t — время движения;
- A — коэффициент пропорциональности.
Известными величинами будут окружность, а также точка начала движения. Отсчет положительных показателей s будет совпадать с направлениями перемещения точки по данной траектории.
Знание траектории движения объекта часто намного упрощает процесс описания движения объекта.
Траектория тела в разных системах отсчета
Определение 4
Система отсчета — совокупность тела отсчета, связанного с координатной осью, и времени.
Если же координата тела не изменяется в течение некоторого времени в данной системе отсчета, то в таком случае тело покоится, то есть оно неподвижно в данной системе отсчета.
Если же координата объекта в выбранной системе отсчета увеличивается со временем, то такое тело совершает движение в положительном направлении координатной оси. И наоборот, если со временем координата тела в данной системе отсчета уменьшается, то такое тело совершает движение в отрицательном направлении оси координат.
Невозможно сказать, как именно движется тело, если не уточнить, в какой системе отсчета рассматривается данное тело. Другими словами, одно и то же тело в различных системах отсчета может совершать разные движения (в том числе и находиться в состоянии покоя).
Посмотрите на картинку:
Примеры решения задач
Задана физическая точка, движение которой в плоскости описывается системой выражений:
Нужно исключить временной показатель из уравнения данной системы.
Выразим время из первого выражения:
Подставим правую часть во второе выражение системы (вместо показателя времени).
Получим: y = A t ( 1 + B t ) = A t + A B t 2 = A x A + A B ( x A ) 2 = x + B A x 2
Источник: wika.tutoronline.ru