Делается обзор современного состояния звуковизоров как гидроакустических средств подводного наблюдения. Приводятся примеры воспроизведения акустического изображения различных объектов с помощью изготовленных в Акустическом институте экспериментальных образцов двумерного и трёхмерного звуковизоров. Даются оценки оптимальных рабочих частот в зависимости от требуемой дальности действия. Анализируются тенденции дальнейшего развития звуковизоров.
В ЗАКЛАДКИ
Введение
Согласно энциклопедии по ультразвуку [1] «звуковизор – это устройство для получения изображения предметов при помощи ультразвуковых волн с использованием акустоэлектронного преобразователя, позволяющего акустическое изображение в форме пространственного распределения звукового давления представить в виде оптического изображения на экране приёмной электронно-лучевой трубки – кинескопа». Данное определение звуковизора, сформулированное 30 лет назад, и сегодня правильно отражает его сущность, однако требует уточнений, позволяющих отличить звуковизор от остальных гидроакустических средств.
Сонар — Sonar — Звук в подводной лодке
Прежде всего, современные звуковизоры принципиально отличает высокое пространственное разрешение (не хуже 1° по углу и нескольких сантиметров по дистанции), позволяющее выделить не только отметку в направлении объекта, но и его форму. Следующее отличие касается требования формировать акустическое изображение в режиме реального времени. По этой причине к звуковизорам не следует причислять широко распространённые гидролокаторы бокового обзора и многолучевые эхолоты. Эти устройства хотя и могут быть использованы для построения акустического изображения подводных объектов, но лишь при условии механического перемещения антенны с последующим синтезированием акустического изображения по многим посылкам гидролокационного сигнала. И, конечно, в современных звуковизорах акустическое изображение строится не на экране кинескопа, а на экране монитора компьютера, являющегося неотъемлемой частью звуковизора.
Растущий интерес к звуковизорам обусловлен целым рядом факторов. Во-первых, с расширением масштабов промышленного освоения Мирового океана неизбежно растёт потребность в качественных средствах подводного наблюдения.
В настоящее время такие средства востребованы при выполнении подводно-технических и поисково-спасательных работ, при охране судов, морских платформ и других подводных сооружений, для мониторинга состояния гидротехнических сооружений, прокладки трубопроводов по морскому дну, обеспечения навигационной безопасности плавания и т.д. Во-вторых, только звук может распространяться под водой на значительные дистанции. Дальность действия оптических средств наблюдения в воде, как правило, не превышает нескольких метров, а в мутной воде практически сводится к нулю. Следовательно, гидроакустические средства часто могут оказаться единственно возможным средством подводного наблюдения.
Краткий обзор современных звуковизоров
В настоящее время существует достаточно большое разнообразие звуковизоров, отличающихся способом формирования характеристики направленности (ХН) антенны и размерностью сканируемого пространства. Классификация звуковизоров приведена на рис. 1.
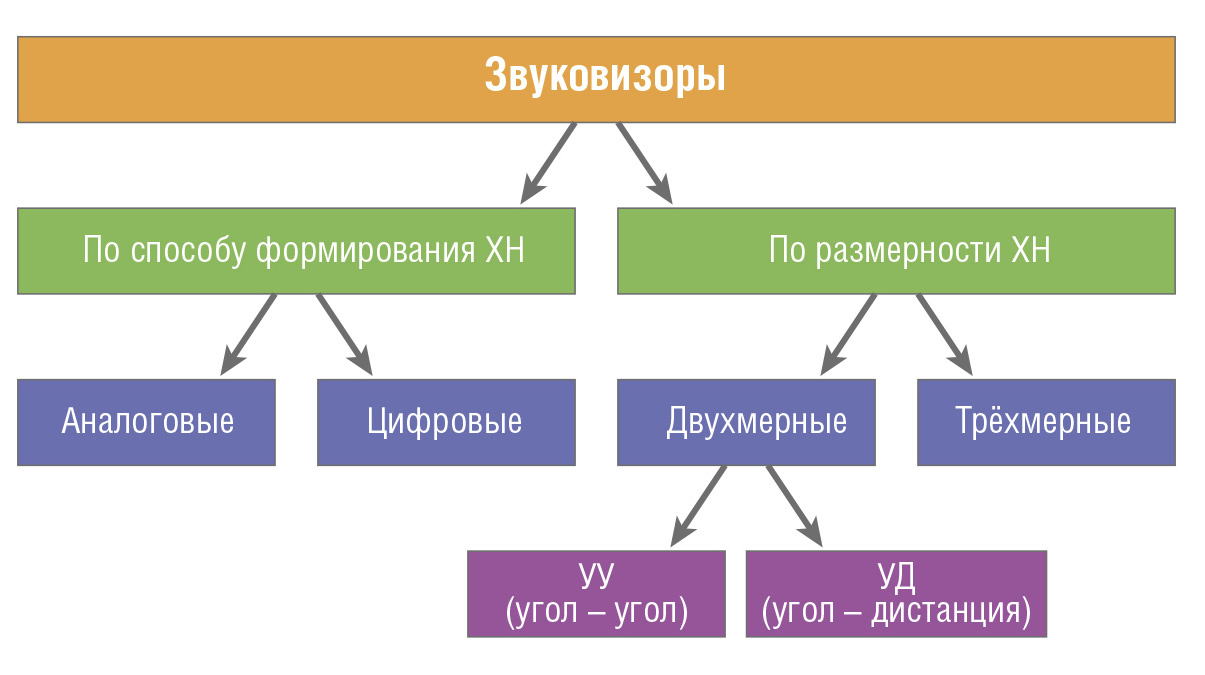
По способу формирования ХН различают аналоговые и цифровые звуковизоры, а по размерности сканируемого пространства – двумерные (2D) и трёхмерные (3D). В аналоговых звуковизорах формирование ХН осуществляется с помощью акустической линзы, в цифровых – путём взвешенного суммирования сигналов с отдельных элементов приёмной антенны. В 3D-звуковизоре обзор пространства осуществляется по всем трём координатам. В 2D-звуковизоре пространственное разрешение обеспечивается либо только по двум угловым координатам (УУ-звуковизор), либо по одному углу и дистанции (УД-звуковизор).
В течение длительного времени развитие звуковизоров шло по линии совершенствования аналоговых двумерных устройств, использующих для формирования лучей акустическую линзу [2]. В таких звуковизорах ультразвуковой прожектор облучает («подсвечивает») наблюдаемый подводный объект. Отражённые ультразвуковые волны с помощью акустической линзы фокусируются на матрицу пьезоэлементов, сопряжённую с передней поверхностью специальной электронно-лучевой трубки. Электронный луч считывает с матрицы электрический потенциал, который, в свою очередь, детектируется, оцифровывается и отображается на мониторе персонального компьютера в виде пространственного распределения яркости (цвета). В этом классе наиболее совершенным, возможно, является звуковизор, созданный совместно Акустическим институтом и научно-производственным объединением «АКМА». Он обладает следующими характеристиками:
- рабочая частота 1 МГц;
- ширина сектора обзора 30°×30°;
- угловое разрешение 0,9°×0,9°;
- предельная дальность действия 30 м;
- вес в воздухе 15 кгс;
- размеры 42×42×55 см.
К недостаткам такого звуковизора следует отнести значительные габариты, обусловленные акустической линзой и электронно-лучевой трубкой. Кроме того, этот звуковизор имеет ограниченное угловое разрешение (порядка 30 точек в каждом направлении) и вовсе не имеет разрешения по дистанции. Следовательно, он не позволяет определять дистанцию до объекта и реконструировать его форму.
Существенное улучшение качества освещения подводной обстановки может быть достигнуто при использовании современных цифровых технологий для формирования пространственной избирательности. Преимущества использования цифровой технологии связаны прежде всего с её методологической гибкостью, которая при высоком быстродействии современных сигнальных процессоров позволяет повысить угловое разрешение, помехоустойчивость и дальность действия за счёт увеличения числа элементов приёмной антенны и использования длинных широкополосных сигналов.
При формировании трёхмерной избирательности появляется возможность воспроизводить не только акустическую освещённость поверхности объекта, но и его форму. Однако современный уровень развития сигнальных процессоров ещё не позволяет формировать достаточное число узконаправленных лучей при использовании полностью заполненной двумерной антенны.
Так, приёмная антенна 3D-звуковизора EchoScope 1600 норвежской фирмы OmniTech состоит из 40×40 элементов. Соответственно, реальное разрешение по каждому углу не превышает 40 лучей. Правда, цифровые методы формирования лучей позволяют при изменении рабочей частоты распределять эти 40 лучей в разныe по ширине сектора обзора. Предусмотрены 3 рабочие частоты: 150, 300 и 600 кГц.
Этим частотам соответствуют сектора углов обзора 90°×90°, 50°×50° и 25°×25° и значения разрешающей способности по углу 2,5°, 1,3° и 0,6°. Предельная дальность действия этой камеры равна 100 м. Скорость обновления изображения составляет 5–10 кадров в секунду. Основным недостатком данного звуковизора следует признать невысокое качество изображения из-за ограниченной разрешающей способности по углам. Можно предположить, что повышение разрешающей способности за счёт увеличения числа элементов сдерживается резким усложнением задач оцифровки сигналов с приёмных элементов антенны и формирования двумерной ХН. Весьма значительны габариты (60×40×20 см) и вес (55 кгс) приёмно-излучающего модуля, а также стоимость этого изделия.
Задача оцифровки входных сигналов и формирования большого числа лучей существенно упрощается при использовании прореженных антенн. Однако при неплотном заполнении поверхности антенны существенно возрастают боковые лепестки ХН антенны.
Так, при расположении элементов антенны вдоль окружности уровень первого бокового лепестка характеристики направленности, описываемой функцией Бесселя нулевого порядка, составляет 40% [3]. Размещение на плоскости 128 приёмных элементов вдоль 16 закручивающихся спиралей позволяет ограничить уровень боковых лепестков величиной 20% при ширине ХН порядка 1° в обоих направлениях [4]. Однако из-за того что такой уровень бокового поля сохраняется во всём полупространстве, суммарный уровень сигнала, проникающего через боковое поле, существенно превышает уровень полезного сигнала, поступающего через основной лепесток ХН антенны, что не позволяет использовать такую антенну для качественного воспроизведения акустического изображения звукорассеивающего объекта. Поэтому гидролокаторы с прореженной антенной практически могут использоваться лишь для обнаружения и определения координат одиночных объектов.
Компромиссное соотношение между качеством акустического изображения и числом элементов антенны достигается при использовании крестообразной антенны (креста Миллса), одна из линеек которой является приёмной, а другая – излучающей. Результирующая ХН такой приёмно-излучающей антенны в точности совпадает с ХН полностью заполненной плоской приёмной антенны, то есть при использовании такой антенны качество изображения будет соответствовать качеству изображения, получаемого при использовании двумерной, полностью заполненной антенны. Однако благодаря неизмеримо меньшему числу элементов задача оцифровки входных сигналов и формирования ХН существенно упрощается. Следовательно, волновые размеры антенны и соответственно её угловое разрешение можно существенно увеличить, а стоимость уменьшить.
Именно такой принцип был использован при создании 3D-звуковизора в Акустическом институте [5]. Его основные характеристики: рабочая частота 200 кГц; ширина сектора обзора 90°×90°; угловое разрешение 1,1°×1,1°; дальность действия 200 м; разрешение по дистанции 5 см; габариты 50×40×30 см; вес в воздухе 20 кгс.
В качестве недостатка следует отметить его достаточно значительные весогабаритные характеристики. Кроме того, последовательный характер облучения приводит к значительному возрастанию времени формирования кадра из-за достаточно длительного времени приёма эхо-сигнала с каждого облучаемого направления. Также весьма высоки требования и к вычислительным ресурсам из-за необходимости формирования большого числа пространственных каналов – не менее 64×64 только в угловых направлениях. Это неизбежно приводит к возрастанию потребляемой мощности, весогабаритных характеристик и стоимости звуковизора в целом.
Весогабаритные характеристики звуковизора принципиально могут быть снижены при увеличении рабочей частоты за счёт уменьшения размеров антенны. Второй образец 3D-звуковизора, изготовленный в Акустическом институте, при рабочей частоте 1 МГц имеет на порядок меньший вес. Неизбежное снижение с увеличением рабочей частоты дальности действия компенсируется уменьшением времени формирования кадра благодаря уменьшению времени распространения звука до границ просматриваемой области.
Весогабаритные характеристики и стоимость звуковизора существенно снижаются также при обзоре пространства лишь по двум координатам: по одному углу и по дистанции (УД-звуковизор). Ширина сектора обзора составляет при этом обычно 30°…45° при ширине отдельного луча 0,3°…1° в направлении сканируемого угла. Ширина луча по ортогональному углу составляет порядка 15°…20°.
Такой звуковизор при наклонном облучении идеально подходит для поиска и распознавания объектов, находящихся на дне или на любой протяженной поверхности, в том числе и на поверхности воды при облучении из подводного положения. Благодаря облучению под малым углом осуществляется обзор достаточно большого участка поверхности, ограниченного лишь дальностью действия прибора, которая в свою очередь ограничена затуханием сигнала в воде. При нахождении объекта на рассеивающей поверхности или вблизи неё его изображение сопровождается изображением тени, форма которой и удаление от изображения объекта предоставляют дополнительную информацию для распознавания и определения координат объекта.
К несомненным достоинствам УД-звуковизора следует также отнести принципиально более высокую скорость формирования кадров, поскольку для этого достаточно всего одной посылки зондирующего сигнала. Благодаря перечисленным достоинствам УД-звуковизоры нашли весьма широкое применение за рубежом. Наибольшее распространение получили звуковизоры фирмы Blue View Technologies и акустическая камера DIDSON производства Sound Metrics Corp. Экспериментальный образец цифрового 2D-звуковизора был изготовлен и в Акустическом институте (АКИН).
Основные характеристики современных звуковизоров сведены в табл. 1.
Источник: www.cta.ru
Акустик с подлодки, 6 букв — сканворды и кроссворды
Ответ на вопрос в сканворде (кроссворде) «Акустик с подлодки», 6 букв (первая — с, последняя — ч):
(СЛУХАЧ) 1 0
Другие определения (вопросы) к слову «слухач» (11)
- Радист (разговорное)
- Человек с тонким слухом (разг.)
- Спец по радиосвязи (разг.)
- Радист (разг.)
- Чем ловит телевидение лопухоидов Гробыня из фэнтези «Таня Гроттер и магический контрабас»
- Подслушивающее устройство
- Русский акустик
- Чуткий музыкант (разг.)
- Русский «акустик»
- Специалист, принимающий на слух сигналы по радио
- Человек с тонким музыкальным слухом
- воен. (военный термин) тот, кто способен принимать на слух передаваемые по радио сигналы ◆ Он не решался радировать о своем несчастье, десятки слухачей услышали бы его просьбу, которую нельзя было даже зашифровать, и, разумеется, разнесли бы по всему фронту. Г. Н. Владимов, «Генерал и его армия», 1994 г.
- разг. (разговорное) тот, кто обладает тонким слухом ◆ Слепые слухачи за десятки километров могли отличить «хейнкель» от «юнкерса». А. В. Иличевский, «Перс», 2009 г.
- разг. (разговорное) тот, кто способен воспроизводить мелодию на слух ◆ Я уже научился играть с листа и стал полноценным музыкантом, а не каким-то там любителем, слухачом . А. А. Азольский, «Диверсант», 2002 г. // «Новый Мир»
Значение слова
СЛУХА’Ч, а́, мужской род
(нов. спец.). 1. Служащий радиосвязи, принимающий передаваемые по радио сигналы. 2. только мн.
Подвешиваемые к ушам приборы для слушания, наушники (см. наушник во 2 знач.).
Что искали другие
- Кто «выводит пафос за границы смешного»
- Часть артиллерийского снаряда
- Невозмутимо спокойный тип
- Изображение моления
- Футбольный клуб Голландии
Случайное
- Младшее дитя в семье
- Религия носителей дредов
- Сущность паутины
- Встречается в играх, в банках и в смартфонах
- Процесс избавления от порчи
- Поиск занял 0.008 сек. Вспомните, как часто вы ищете ответы? Добавьте sinonim.org в закладки, чтобы быстро искать их, а также синонимы, антонимы, ассоциации и предложения.
Источник: sinonim.org
Будущее подводного военно-морского флота
В новом, XXI веке ожидается качественный скачок в совершенствовании подводных лодок. На смену сегодняшним должны прийти многоцелевые подводные лодки, оснащенные высокоэффективным бортовым разведывательным оборудованием, обитаемыми и необитаемыми подводными и беспилотными летательными аппаратами. Прежде всего, подводные лодки будут совершенствовать свою скрытность, скорость и качество подводного хода и количество оружия на борту.
Над чем сегодня в первую очередь думают конструкторы создавая инновационные разработки подводных лодок? В первую очередь это малошумность ходовой части. В современных условиях только малошумные подводные лодки могут скрытно перемещаться и только их гидроакустические средства позволяют обнаружить противника на больших расстояниях и тем самым своевременно использовать оружие или уклониться от противника.
Основными источниками шумов на подводных лодках являются гребные винты, механизмы, работающие внутри корабля, и шумы, создающиеся водяным потоком, обтекающим корпус, — гидравлические шумы.
Как заглушить шум гребных винтов?
Выяснено, что увеличение размеров гребных винтов и увеличение количества лопастей снижает их шум. Медленно вращающийся винт большого диаметра с малой скоростью на кончиках лопастей создает меньшую завихренность потока воды, т. е. меньшую турбулентность (от латинского «turbulentus» — «бурный», «беспорядочный»), а это снижает уровень шума. Турбулентное течение жидкости всегда создает шум.
Вы, может быть, слышали, как шумит поток горной реки. Вода бурлит, срывается с лежащих на дне валунов. Вы еще далеко от реки, а шум слышен за сотни метров. Напротив, медленный поток бесшумен, незаметен, его называют ламинарным течением (от латинского «lamina» — «пластинка», «полоска»). При таком течении жидкость перемещается (течет) слоями без перемешивания.
Подойдя к многоводной реке на равнине, вы не услышите шума. Вода течет, а шума нет.
Существование ламинарного течения, послойного течения без перемешивания слоев, возможно только до определенного значения скорости. Стоит чуть-чуть перешагнуть порог, как ламинарное течение становится турбулентным. Попробуйте убедиться в этом сами. Откройте водопроводный кран чуть-чуть, чтобы вода лилась тоненькой ленивой струйкой, а затем откройте его полностью, и вы услышите шум, таящийся в быстро бегущей воде. Это ваш домашний водопад.
Есть еще один способ снижения шума гребных винтов. Можно насадить два гребных винта на одну ось, но заставить их вращаться в разные стороны. Уменьшение шумов при этом происходит потому, что воде, закрученной первым винтом и раскрученной вторым, не сообщается вращательное движение. Прямое течение воды — ламинарное течение, не производит демаскирующего шума.
В более далеком будущем предполагается полный отказ от гребных винтов и переход на единые двигательные установки, работающие по принципу гидрореактивных двигателей, например, с паровой струей или за счет непосредственного использования ядерной энергии для ускорения протекающей через двигатель воды.
Как заглушить шумы, создаваемые корпусом подводной лодки
Уровень шумов, создаваемых подводной лодкой, в значительной степени зависит от формы и гладкости ее корпуса. Корпусу стремятся придать более обтекаемый вид с убирающимися внутрь выступающими частями. Неровности корпуса, даже такие, как сварные швы и шероховатость окраски, на большой скорости хода вызывают турбулентность обтекания. Но здесь уже достигнут предел усовершенствований. Поэтому нелишне поучиться этому у дельфинов.
Расчетами установлено, что дельфины развивают скорость, в 8—10 раз превышающую их мускульные возможности (мощность), если сопротивление их движению принимать равным обычно принятому в кораблестроении. Этому способствует структура их кожного покрова, который делает кожу дельфина способной превращать турбулентный (вихревой) поток воды, соприкасающийся с дельфином, в ламинарный (слоистый). Ламинарное обтекание резко уменьшает энергетические затраты на преодоление сопротивления, что одновременно снижает шум.
Один из методов ламинаризации рассматривает отсос некоторой части воды из потока, непосредственно прилегающего к корпусу. Возможно, использование отсоса повысит скорость при той же мощности двигателей в 1,5 раза. Исследуются покрытия корпуса, повторяющие особенности кожи дельфина.
Но это все в будущем,^ сегодня, чтобы быть незаметным, приходится снижать скорость хода лодки до 5 узлов (9,2 км/ч). Но этого мало. Есть еще шумы, работающие внутри лодки.
Как заглушить шум механизмов, работающих внутри корабля
В ходе проводившихся гидроакустических испытаний было установлено, что источником наиболее интенсивных шумов являются не средства движения подводной лодки (гребные винты, двигательные установки), а источники, о которых ранее даже не задумывались. Это хлопающие двери переборок, падающие гаечные ключи, спускаемая вода в туалетах, включенные кофеварки и электробритвы и т. д.
Будущие подводные лодки будут ходить под водой на скоростях больше 25 узлов (46,3 км/ч), создавая малые уровни шума, с тем чтобы слышать самой и не быть услышанной.
Это произойдет за счет применения целого ряда новейших технологий и специальных мероприятий. Например, располагать различное оборудование таким образом, чтобы оставлять свободное пространство для рассеивания звуковых волн. Где это не удается, то заключать приборы в своеобразные сурдокамеры (от латинского «surdus» — «глухой» и камера).
В местах крепления механизмов к палубам уже стали устанавливать пневматические амортизаторы, аналогичные самолетным, и контролировать уровни вибраций всего оборудования, уровня собственных шумов — своеобразная система встроенного контроля, применяемая на самолетах. Помимо этого, шумность подводной лодки будет уменьшаться, если ее внешние обводы будут рассеивать гидролокационные сигналы акустических станций противника, как это делается на самолетах-невидимках.
Сейчас уже есть водо-водяной атомный реактор с уменьшенным количеством компонентов, что тоже несколько снижает уровень шума.
В будущем роль гидроакустических средств еще более увеличится. Обрабатывать эту информацию теперь поручается компьютерам.
На новых подводных лодках предполагается размещать необитаемые (беспилотные) подводные аппараты-роботы, которые и под водой и в воздухе над морем смогут вести разведку. Оба эти робота, управляемы по радио, будут запускаться под водой и из-под воды в воздух.
Такие подводные лодки будут и длиннее, и больше, чтобы боезапас был у них вдвое, а то и втрое больше.
Как плавать глубоко
Один из основных элементов скрытности и неуязвимости подводной лодки — глубина погружения. Современные подводные лодки плавают на глубинах: одни — 400 м, другие — 600 м, тогда как средняя глубина Мирового океана — 60 000 метров.
Рост глубины погружения зависит от прочности корпуса. Чем глубже подводная лодка погружается, тем большее давление воды на себе испытывает. Выдержать такое, мощное давление способен либо очень толстый (тяжелый) корпус, либо корпус, имеющий особую обтекаемую форму, либо корпус, сделанный из особо прочных материалов, которые непременно появятся в обозримом будущем.
Для очень больших глубин наиболее подходят конструкции в виде шаров (сферических оболочек), нанизанных на одну ось. Внешне такая конструкция будет выглядеть как стручок гороха. Зато такой корпус выдерживает гораздо большее давление. Он, при одной и той же массе, намного прочнее цилиндра. Можно надеяться также и на появление более прочных сталей, титановых и бериллиевых сплавов.
Изготовление прочных корпусов из стеклопластика возможно уже в настоящее время.
Есть основания надеяться на то, что подводные лодки будут плавать на глубине 2000 м. С увеличением глубины погружения уменьшается вероятность поражения подводных лодок противолодочным оружием. Возрастают их собственные возможности поиска противника за счет известных звуковых подводных каналов, простирающихся на больших глубинах.
Источник: www.seapeace.ru