Структурная схема, поясняющая устройство и работу эхолота, показана на рис. 1. Тактовый генератор G1 управляет взаимодействием узлов прибора и обеспечивает его работу в автоматическом режиме. Генерируемые им короткие (0,1 с) прямоугольные импульсы положительной полярности повторяются каждые 10 с. Своим фронтом эти импульсы устанавливают цифровой счетчик РС1 в нулевое состояние и закрывают приемник А2, делая его нечувствительным к сигналам на время работы передатчика. Спадом тактовый импульс запускает передатчик А1, и излучатель-датчик BQ1 излучает в направлении дна короткий (40 мкс) ультразвуковой зондирующий импульс. Одновременно открывается электронный ключ S1, и колебания образцовой частоты 7500 Гц от генератора G2 поступают на цифровой счетчик РС1.
Pиc.1 По окончании работы передатчика приемник А2 открывается и приобретает нормальную чувствительность. Эхосигнал, отраженный от дна, принимается датчиком BQ1 и после усиления в приемнике закрывает ключ S1. Измерение закончено, и индикаторы счетчика РС1 высвечивают измеренную глубину.
Вскрытие датчика эхолота Lucky FFW718. Основные элементы, принцип работы и другие полезные моменты.
Очередной тактовый импульс вновь переводит счетчик РС1 в нулевое состояние, и процесс повторяется. Принципиальная схема эхолота с пределом измерения глубины до 59,9 м изображена на рис. 2. Его передатчик представляет собой двухтактный генератор на транзисторах VT8, VT9 с настроенным на рабочую частоту трансформатором Т1.
Необходимую для самовозбуждения генератора положительную обратную связь создают цепи R19C9 и R20C11.’ Генератор формирует импульсы длительностью 40 мкс с радиочастотным заполнением. Работой передатчика управляет модулятор, состоящий из одновибратора на транзисторах VT11, VT12, формирующего модулирующий импульс длительностью 40 мкс, и усилителя на транзисторе VT10. Модулятор работает в ждущем режиме, запускающие тактовые импульсы поступают через конденсатор С14.
Pиc.2 Приемник эхолота собран по схеме прямого усиления. Транзисторы VT1, VT2 усиливают принятый излучателем-датчиком BQ1 эхосигнал, транзистор VT3 использован а амплитудном детекторе, транзистор VT4 усиливает продетектированный сигнал. На транзисторах VT5, VT6 собран одновибратор, обеспечивающий постоянство параметров выходных импульсов и порога чувствительности приемника.
От импульса передатчика приемник защищают диодный ограничитель (VD1, VD2) и резистор R1. В приемнике применено принудительное выключение одновибратора приемника с помощью транзистора VT7. На его базу через диод VD3 поступает положительный тактовый импульс и заряжает конденсатор С8.
Открываясь, транзистор VT7 соединяет базу транзистора VT5 одновибратора приемника с положительным проводом питания, предотвращая тем самым возможность его срабатывания от приходящих импульсов. По окончании тактового импульса конденсатор С8 разряжается через резистор R18, транзистор VT7 постепенно закрывается, и одновибратор приемника обретает нормальную чувствительность.
Цифровая часть эхолота собрана на микросхемах DD1-DD4. В ее состав входит ключ на элементе DD1.1, управляемый RS-триггером на элементах DD1.3, DD1.4. Импульс начала счета поступает на триггер от модулятора передатчика через транзистор VT16, окончания — с выхода приемника через транзистор VT15. Генератор импульсов с образцовой частотой повторения (7500 Гц) собран на элементе DD1.2.
Что внутри датчика эхолота Хамминбёрд?
Из резистора R33 и катушки L1 составлена цепь отрицательной обратной связи, выводящей элемент на линейный участок характеристики. Это создает условия для самовозбуждения на частоте, определяемой параметрами контура L1C18. Точно на заданную частоту генератор настраивают подстроечником катушки. Сигнал образцовой частоты через ключ поступает на трехразрядный счетчик DD2-DD4.
В нулевое состояние его устанавливает фронт тактового импульса, поступающего через диод VD4 на входы R микросхем. Тактовый генератор, управляющий работой эхолота, собран на транзисторах разной структуры VT13, VT14. Частота следования импульсов определена постоянной времени цепи R28C15. Катоды индикаторов HG1-HG3 питает генератор на транзисторах VT17, VT18 [2].
Кнопка SB1 («Контроль») служит для проверки работоспособности устройства. При нажатии на нее на ключ VT15 поступает закрывающий импульс и индикаторы эхолота высвечивают случайное число. Через некоторое время тактовый импульс переключает счетчик, и индикаторы должны высветить число 888, что свидетельствует об исправности эхолота.
Эхолот смонтирован в коробке, склеенной из ударопрочного полистирола. Большинство деталей размещено на трех печатных платах из фольгированного стеклотекстолита толщиной 1,5 мм. На одной из них (рис. 3) смонтирован передатчик, на другой (рис. 4) — приемник, на третьей (рис. 5 — цифровая часть эхолота.
Платы закреплены на дюралюминиевой пластине размерами 172Х72 мм, вложенной в крышку коробки. В пластине и крышке просверлены отверстия под выключатель питания Q1 (МТ-1), кнопку SB1 (КМ1-1) и гнездо ВР-74-Ф коаксиального разъема XI, а также вырезано окно для цифровых индикаторов. В эхолоте применены резисторы МЛТ, конденсаторы КЛС, КТК и К53-1.
Транзисторы КТ312В и ГТ402И можно заменить на любые другие транзисторы этих серий, МП42Б — на МП25, КТ315Г-на КТ315В. Микросхемы серии К176 заменимы соответствующими аналогами серии К561, вместо микросхемы К176ИЕЗ (DD4) можно применить К176ИЕ4. Если эхолот будет использован на глубине не более 10 м, счетчик DD4 и индикатор HG3 можно не устанавливать.
Обмотки трансформатора Т1 намотаны проводом ПЭЛШО 0,15 на каркасе диаметром 8 мм с фер-ритовым (600НН) подстроечником диаметром 6 мм. Длина намотки — 20 мм. Обмотка I содержит 80 витков с отводом от середины, обмотка II — 160 витков. Трансформатор Т2 выполнен на ферритовом (3000НМ) кольце типоразмера К16Х10Х4,5. Обмотка I содержит 2Х 180 витков провода ПЭВ-2, 0,12, обмотка 11-16 витков провода ПЭВ-2, 0,39.
Катушка L1 (1500 витков провода ПЭВ-2 0,07) намотана между щечками на каркасе диаметром 6 мм из органического стекла. Диаметр щечек — 15, расстояние между ними — 9 мм. Подстроечник — от броневого магнитопровода СБ-1а из карбонильного железа. Ультразвуковой излучатель-датчик эхолота изготовляют на основе круглой пластины диаметром 40 и толщиной 10 мм из титаната бария.
К ее посеребренным плоскостям сплавом Вуда припаивают тонкие (диаметром 0,2 мм) проводники-выводы. Датчик собирают в алюминиевом стакане от оксидного конденсатора диаметром 45. 50 мм (высоту — 23. 25 мм — уточняют при сборке). В центре дна стакана сверлят отверстие под штуцер, через который будет входить коаксиальный кабель (РК-75-4-16, длина 1. 2,5 м), соединяющий датчик с эхолотом.
Пластину датчика приклеивают клеем 88-Н к диску из мягкой микропористой резины толщиной 10 мм. При монтаже оплетку кабеля припаивают к штуцеру, центральный проводник — к выводу обкладки датчика, приклеенной к резиновому диску, вывод другой обкладки — к оплетке кабеля. После этого диск с пластиной вдвигают в стакан, пропуская кабель в отверстие штуцера, и закрепляют штуцер гайкой.
Поверхность тита-натовой пластины должна быть углублена в стакан на 2 мм ниже его кромки. Стакан закрепляют строго вертикально и заливают до края эпоксидной смолой. После затвердевания смолы поверхность датчика шлифуют мелкозернистой наждачной бумагой до получения гладкой плоскости. К свободному концу кабеля припаивают ответную часть разъема XI.
Для налаживания эхолота необходимы осциллограф, цифровой частотомер и блок питания напряжением 9 В. Включив питание, проверяют работоспособность счетного устройства: если оно исправно, то индикаторы должны высвечивать число 88,8. При нажатии на кнопку SB1 должно появляться случайное число, которое с приходом очередного тактового импульса должно вновь сменяться числом 88,8.
Далее налаживают передатчик. Для этого к эхолоту подключают датчик, а осциллограф, работающий в режиме ждущей развертки,- к обмотке 11 трансформатора Т1. На экране осциллографа с приходом каждого тактового импульса должен появляться импульс с радиочастотным заполнением.
Подстроечником трансформатора Т1 (если необходимо, подбирают конденсатор С10) добиваются максимальной амплитуды импульса, которая должна быть не менее 70 В. Следующий этап — налаживание генератора импульсов образцовой частоты. Для этого частотомер через резистор сопротивлением 5,1 кОм присоединяют к выводу 4 микросхемы DD1.
На частоту 7500 Гц генератор настраивают подстроечником катушки L1. Если при этом подстроечник занимает положение, далекое от среднего, подбирают конденсатор С18. Приемник (а также модулятор) лучше всего настраивать по эхо-сигналам, как это описано в [I].
Для этого датчик прикрепляют резиновым жгутом к торцевой стенке пластмассовой коробки размерами 300Х100Х100 мм (с целью устранения воздушного зазора между датчиком и стенкой ее смазывают техническим вазелином). Затем коробку заполняют водой, выпаивают из приемника диод VD3 и присоединяют к выходу приемника осциллограф.
Критерием правильной настройки приемника, модулятора передатчика, а также качества ультразвукового датчика является число наблюдаемых на экране эхосигналов, возникающих вследствие многократных отражений ультразвукового импульса от торцевых стенок коробки. Для увеличения видимого числа импульсов подбирают резисторы R2 и R7 в приемнике, конденсатор С13 в модуляторе передатчика и изменяют положение подстроечника трансформатора Т1.
Для регулировки устройства задержки включения приемника впаивают на место диод VD3, заменяют резистор R18 переменным (сопротивлением 10 кОм) и с его помощью добиваются исчезновения двух первых эхосигналов на экране осциллографа. Измерив сопротивление введенной части переменного резистора, его заменяют постоянным такого же сопротивления.
После настройки число эхосигналов на экране осциллографа должно быть не менее 20. Для измерения глубины водоема датчик лучше всего закрепить на поплавке с таким расчетом, чтобы нижняя его часть была погружена в воду на 10. 20 мм. Можно прикрепить датчик к шесту, с помощью которого его погружают в воду кратковременно, на время измерения глубины.
При использовании эхолота в плоскодонной алюминиевой лодке для измерения небольших глубин (до 2 м) датчик можно приклеить к днищу внутри лодки. В заключение следует отметить, что в солнечные дни яркость свечения цифровых индикаторов может оказаться недостаточной. Повысить ее можно заменой батареи «Корунд» («Крона») источником питания с несколько большим напряжением, например, батареи, составленной из восьми аккумуляторов Д-0,25 (никаких изменений схемы и конструкции прибора это не потребует). ЛИТЕРАТУРА
1. Бокитько В., Бокитько Д. Портативный эхолот.- Радио. 1981. № 10, с. 23-25.
2. Виноградов Ю. Преобразователь для питания индикаторов.- Радио, 1984, № 4. с. 55. (Р 10/88)
Источник: cxem.net
Электрические схемы эхолотов (Просматривают: 2)

Предлагаю делится электрическими принципиальными схемами эхолотов.
начну: ищется принципиальная схема двухлучевого трансюдера (датчика) эхолота. Поделитесь, кто богат плз. 🙂
———- Сообщение добавлено в 03:32 ———- Предыдущее сообщение размещено в 03:20 ———-
конкретнее — интересует девайс с 5 проводами, 2 в оплетке — «земле», 2 отдельно. Оно «звонится» должно? Вскрывать запаянный герметичный датчик пока нет понимания — неохото .
GRO-AL
С нами с 22.09.2011 Сообщения 1 880 Репутация 2 885 Возраст 66 Откуда Калининград
Электрические схемы эхолотов
Предлагаю делится электрическими принципиальными схемами эхолотов.
начну: ищется принципиальная схема двухлучевого трансюдера (датчика) эхолота. Поделитесь, кто богат плз. 🙂
———- Сообщение добавлено в 03:32 ———- Предыдущее сообщение размещено в 03:20 ———-
конкретнее — интересует девайс с 5 проводами, 2 в оплетке — «земле», 2 отдельно. Оно «звонится» должно? Вскрывать запаянный герметичный датчик пока нет понимания — неохото .
Предложение делиться хорошее, но было-бы неплохо начать с выкладывания информации, а не с её добычи. И с картами -тоже.
Что за девайс? — секрет? Вот схема близкая по описанию:
den68
С нами с 06.07.2013 Сообщения 10 Репутация 18 Откуда СПб
Электрические схемы эхолотов
Спасибо! нет, не секрет jj-connect 300 Duo
ТРИВИ
С нами с 19.09.2011 Сообщения 4 031 Репутация 2 848 Откуда Самара
Электрические схемы эхолотов
Если здесь и появятся схемы,то скорее не документация,а восстановленные,нарисованные ручками.Выложенное GRO-AL,приятное исключение,спасибо!
GRO-AL
С нами с 22.09.2011 Сообщения 1 880 Репутация 2 885 Возраст 66 Откуда Калининград
Электрические схемы эхолотов
Если здесь и появятся схемы,то скорее не документация,а восстановленные,нарисованные ручками.Выложенное GRO-AL,приятное исключение,спасибо!
Схем и полноценной документации на эхолоты, а тем более антенны
( датчики) в свободной сети действительно мало. Но кое-что
попадается, вот тут кое-что есть:http://faq.airmar.com/index.php?sid=553511action=artikelid=240любительских» эх-тов не владею.
Из любопытства сам бы посмотрел.
GRO-AL
С нами с 22.09.2011 Сообщения 1 880 Репутация 2 885 Возраст 66 Откуда Калининград
Электрические схемы эхолотов
ТРИВИ
С нами с 19.09.2011 Сообщения 4 031 Репутация 2 848 Откуда Самара
Электрические схемы эхолотов
Есть вот такая схема-фрагмент промышленного эхолота отечественного производства.Пробовал собирать входную часть до детектора.Детектор тоже не впечатлил.
Вложения
41.5 КБ · Просмотры: 787
Усилитель и детектор.jpg
ТРИВИ
С нами с 19.09.2011 Сообщения 4 031 Репутация 2 848 Откуда Самара
Электрические схемы эхолотов
Вот,про бат. отсек Практика,иногда спрашивают.
Вложения
33.7 КБ · Просмотры: 1 149
Датчик Практика .jpg
hedik1970
С нами с 11.12.2012 Сообщения 11 Репутация 6 Возраст 52 Откуда Лысково, Нижегородской
Электрические схемы эхолотов
Архив с фотографиями платы эхолота Humminbird Matrix 27 (аналогичная 500 серии Humminbird Fishfinder). Пригодится если у кого выгорели элементы. Ссылка прямая не вставляется поэтому попробую через пробел набить
http://d e p o s i t f i l e s.com/files/rgblq8eyv
snk-j
С нами с 12.03.2010 Сообщения 395 Репутация 497 Откуда Воткинск,Удмуртия
Электрические схемы эхолотов
Архив с фотографиями платы эхолота Humminbird Matrix 27 (аналогичная 500 серии Humminbird Fishfinder). Пригодится если у кого выгорели элементы. Ссылка прямая не вставляется поэтому попробую через пробел набить
http://d e p o s i t f i l e s.com/files/rgblq8eyv
Все вставляется, http://dfiles.ru/files/rgblq8eyv
Вставляйте правильно.
Вот теже яйцы, только без капчи и ожидания и скорость по более.
hedik1970
С нами с 11.12.2012 Сообщения 11 Репутация 6 Возраст 52 Откуда Лысково, Нижегородской
Электрические схемы эхолотов
Раз Вы такой умный, то что же раньше не кинули ссылку, может кому нибудь бы уже помогли.
Сам искал недавно для Пираньи 15 и 10 схему или маркировку выгоревших в уголь транзисторов. Подобные фотки очень бы помогли в то время, но многих жаба душит, хлеб с маслом потеряют.
Схему по питалову пришлось самому разрисовывать. А предыдущая информация попалась на глаза, и я вспомнил и про этот форум, и про эту ветку, и про просьбу выкладывать схемы. Второпях не обратил внимание на кнопку вставить ссылку, и вставил как текст. После ответа ссылка получалась неправильная. Пришлось её раскарячивать.
Кусок своей схемы питания обещаюсь выложить, только боюсь опять кто то носом начнёт тыкать.
Кстати про яйца, посмотрите когда они созданы — вчера! И я не знаю, весьма может быть, что после прочтения моего сообщения.
snk-j
С нами с 12.03.2010 Сообщения 395 Репутация 497 Откуда Воткинск,Удмуртия
Электрические схемы эхолотов
Раз Вы такой умный, то что же раньше не кинули ссылку, может кому нибудь бы уже помогли.
Сам искал недавно для Пираньи 15 и 10 схему или маркировку выгоревших в уголь транзисторов. Подобные фотки очень бы помогли в то время, но многих жаба душит, хлеб с маслом потеряют.
Схему по питалову пришлось самому разрисовывать. А предыдущая информация попалась на глаза, и я вспомнил и про этот форум, и про эту ветку, и про просьбу выкладывать схемы. Второпях не обратил внимание на кнопку вставить ссылку, и вставил как текст. После ответа ссылка получалась неправильная. Пришлось её раскарячивать.
Кусок своей схемы питания обещаюсь выложить, только боюсь опять кто то носом начнёт тыкать.
Кстати про яйца, посмотрите когда они созданы — вчера! И я не знаю, весьма может быть, что после прочтения моего сообщения.
Фотки Ваши, просто выложил на более простом и быстром ресурсе, и без рекламы, тыкать носом я и не собирался, просто указал. что нужно правильно вставлять.Тем самым обратил Ваше внимание на на эту возможность.Т.к. сам иногда мучаюсь на форумах с вставкой видео и всяких сторонних «ресурсов»
Источник: www.rusfishing.ru
Руководство по датчикам эхолота Airmar. Часть 1
Хороший эхолот зависит от эффективного преобразователя, передающего и принимающего сигналы. Преобразователь является сердцем системы эхолота. Это устройство, которое изменяет электрические импульсы в звуковые волны или акустическую энергию и обратно. Другими словами, это устройство посылает звуковые волны, а затем принимает эхо-сигналы, и эхолот интерпретирует или «обнаруживает», что находится ниже поверхности воды.

Как работает датчик?
Самый простой способ понять, как функционирует преобразователь, это представить его как прибор с динамиком и микрофоном. Преобразователь получает последовательность высоковольтных электрических импульсов от эхолота. Затем, как стереодинамики у вас дома, датчик преобразует импульсы в звук. Звук проходит через воду, как волны давления.
Когда волна достигает таких объектов, как водоросли, камни, скалы, рыба или дно, волна отражается. Волна возвращается эхом — так же, как ваш голос будет отражаться эхом от стены каньона. Когда отраженная звуковая волна возвращается, датчик действует, как микрофон.
Он принимает звуковую волну в течение времени между каждым импульсом передачи и преобразует его обратно в электрическую энергию. Преобразователь тратит около 1% своего времени для передачи и 99% своего времени спокойно слушая эхо-сигналы. Помните, однако, что эти периоды времени измеряются в микросекундах, поэтому время между импульсами очень короткое. Эхолот вычисляет разницу во времени между передающим импульсом и обратным эхом, а затем отображает эту информацию на экране, в понятном пользователю виде.

Что входит в Создание датчика?
Основным компонентом датчика глубины является пьезокерамический элемент. Это та часть, которая преобразует электрические импульсы в звуковые волны, а когда эхо возвращается, пьезокерамический элемент преобразует звуковые волны обратно в электрическую энергию. Пьезокерамические элементы наиболее часто выполнены в форме диска, но они также могут быть в форме стержня или кольца. Преобразователь может содержать один элемент или ряд элементов соединенных вместе (массив). Преобразователь состоит из шести отдельных компонентов:

Как датчик узнает глубину?
Эхолот измеряет время между передачей звука и приемом его эха. Звук проходит по воде со скоростью около 1463 м/с (4,800 футов/с), чуть менее мили в секунду. Для того, чтобы вычислить расстояние до объекта, эхолот умножает время, прошедшее между передачей звука и принятым эхом на скорость звука в воде. Система эхолота интерпретирует результат и отображает глубину воды для пользователя.

Откуда датчик знает, как выглядит дно?
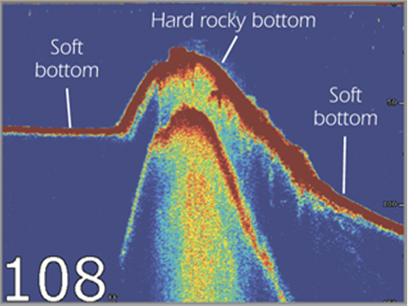
Поскольку лодка движется по воде, отголоски некоторых звуковых волн возвращаются быстрее, чем другие. Мы знаем, что все звуковые волны движутся с одинаковой скоростью. Когда звуковая волна в одной секции звукового поля возвращается быстрее, чем другая, это означает, что волна отскочила от чего-то находящегося ближе к датчику. Эти возвращающиеся звуковые волны показывают все выпуклости и впадины на подводной поверхности — структуру дна. Эхолоты способны определить мягкое или жесткое дно, и даже различить заросли водорослей и камни, потому что звуковые волны отражаются от этих поверхностей по-разному.
Как датчик определяет рыбу?
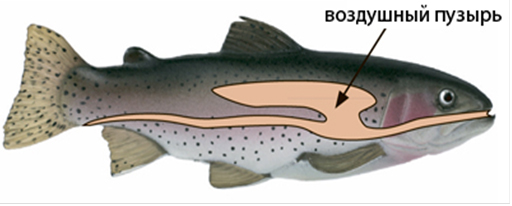
Датчик может обнаружить рыбу, так как он чувствует воздушный пузырь. Почти каждая рыба имеет орган — воздушный пузырь, заполненный газом, что позволяет рыбе легко приспособиться к давлению воды на разных глубинах. Количество газа в воздушном пузыре может быть увеличено или уменьшено, чтобы регулировать плавучесть рыбы.
Поскольку воздушный пузырь содержит газ, он резко отличается плотностью, от плоти рыбы, а также воды, которая окружает ее. Из-за этой разницы в плотности, звуковые волны эхолота отскакивают от рыбы отчетливо. Преобразователь принимает эхо-сигналы и эхолот распознает эти различия. Затем эхолот отображает сигнал в виде рыбы.
Продолжение читайте в следующей статье.
Источник: argodip.com
Эхолот — выбор датчика и установка на катер
Любой водкомоторник, вне зависимости от его опыта и количества часов, проведенных на воде, всегда стремится знать — что и кто находится под его катером.
Лодочник или рыбак желает поймать трофейный экземпляр рыбины, чтобы затем похвастать им на форуме водномоторников.
Как же определить глубину, рельеф дна под катером или наличие и величину представителей подводного мира в месте лова?
Для удовлетворения любопытства водкомоторников, рыбаков и прочих лодочников умные и предприимчивые дяденьки придумали прибор — эхолот (гидролокатор, echolot, fishfinder, sonar).
Принцип работы эхолота
Современные технологии предоставляют любопытным водкомоторникам и рыбакам такую возможность — заглянуть под свою лодку на несколько десятков метров ниже — за цену от 100 уе и выше: для этого нужно приобрести чудо-прибор, имеющий название – эхолот (fishfinder, sonnar).
На рынке широко представлена продукция таких монстров эхолотостроения как Garmin, Raymarine, Lowrance, Humminbird, Navman, Furuno, Interphase и пр..
Принцип работы эхолота прост — в основу его положен принцип эхолокациии — излучатель направляет на дно ультразвуковой импульс, перпендикулярно водной поверхности. Ультазвуковая волна распространяется прямолинейно со скоростью около полутора тысяч метров в секунду и отражается с той же скоростью, от любых препятствий – водной растительности, элементов рельефа дна, затопленных деревьев и прячцщихся обитателей водных глубин. После отражения сигнала измеряется время, которое потребовалось ему на достижение объекта и чтобы вернуться в отраженном виде, затем данные обрабатываются процессором, и выводятся на экран в виде дна и рыб, прячущихся от рыбака.
При выборе эхолота необходимо обратить внимание на ряд важных характеристик:
– быстродействие процессора прибора, то есть скорость, с которой он может обрабатывать поступающую информацию. От данной характеристики напрямую зависит скорость движения лодки, на которой способен качественно функционировать прибор.
Мой старый эхолот Navman fish 440 при скорости ~50км/ч при резком изменении глубины с 12 до 2 метров, слепнул начиная постепенно менять свои показания глубины так: 11 — 10 — 9 . 2, а катер тем временем ведь движется вперед!;
– разрешение экрана прибора по вертикали и горизонтали;
– в зависимости от используемых датчиков эхолокации различают эхолоты с одним, двумя, тремя, четырьмя и шестью (3D) лучами. В зависимости от количества этих лучей можно получить то или иное качество изображения. Двухлучевой прибор лишь указывает на нахождение рыбы под лодкой, не давая информации о ее конкретном положении, трехлучевой при изображении символа дополнительно указывает, где она находится (L-слева от лодки, R – справа).
Эхолот, c четурехлучевым датчиком, может с успехом применяться при тролинге, так как дает четкое представление о структуре и рельефе дна на достаточном расстоянии от лодки. Наибольшее представление о пространстве под лодкой дает шестилучевик, выводящий на экран изображение в формате 3D.
Датчики эхолотов
Главный враг правильной работы эхолота — это турбулентность, возникающая при движении катера. Обычно излучатель эхолота крепится на транце лодки и пузырьки воздуха, движущиеся вдоль поверхности днища, очень сильно рассеивают и поглощают ультразвук, в результате чего эхолот «теряет» дно и «слепнет». У разных моделей это выражается по-разному: цифры глубины мигают, пропадают, эхолот показывает несуществующие глубины и т. д. В любом случае это неприятно, а виновата в этом неправильная установка датчика.
При выборе эхолота никто не смотрит на то, что за датчик (трансдьюсер), идет в комплекте, в таком случае можно получить большой дорогой красивый экран, не показывающий точной и достоверной информации эхолокации.
Большинство производителей эхолотов не выпускает качественных датчиков, и свою продукцию комплектуют датчиками эконом-класса. Крупный производитель трансдьюсеров всех типов и уровней — американская фирма Airmar.
Неоднократно встречалась информация, что Raymarine и Furuno не выпускают трансдьюсеров, а используют датчики Airmar. Lowrance, Garmin, Humminbird — комплектуют эхолоты своими датчиками, а в своих каталогах предлагают ассортимент датчиков Airmar с разъемами для своих приборов.
Как правило — дешевые эхолоты комплектуют трансдьюсерами собственного производства, имеющих крепление на транец лодки, а высокоточные, дорогие эхолоты либо не комплектуют ими вовсе, предлагая их выбрать отдельно, либо продают уже в комплекте с датчиками Airmar.
Частота излучения — заметно влияет на деталировку изображения, более крупный трансдьюсер имеет больше зеркало пьезоэлемента и как следствие — лучшую чувствительность при приеме слабых эхосигналов.
Толстый кабель с хорошим винтовым штекером и с толстыми контактами — характеризуется малым удельным сопротивлением и при передаче эхосигналов лучше защищает их от затухания и помех.
Устройство датчика эхолота
Основным компонентом датчика является преобразователь ― пьезокерамический элемент. Он может быть один (в простом датчике), или их может быть несколько (до 30 штук и более) ― в сложных, многолучевых узконаправленных датчиках.
Пьезокерамический элемент преобразует электрические импульсы в излучаемые звуковые волны, и когда эхо от них возвращается, отразившись от препятствия (морского дна или рыбы), он опять преобразует звуковые волны в электрический сигнал.
Другим параметром датчика является максимальная выходная мощность ― она должна соответствовать мощности эхолота.
Есть правило: чем ниже частота и выше мощность, чем уже луч, тем успешнее он проходит на глубину и обеспечивает более точные измерения именно на больших глубинах. С увеличением количества лучей повышается точность и деталировка изображения. Если при небольшой мощности параметр частоты выше, а луч более узкий, то сигнал распространяется на меньшую глубину; при этом меньше охват пятна дна, а деталировка донных объектов больше.
На классических эхолотах работают «универсальные» датчики с одной частотой 200 кГц или двумя (200 и 50 кГц) с возможностью их одновременной или переменной работы.
Высокая частота 200–455 кГц и узкий луч 9–11° позволяют определить рельеф грунта и наличие рыбы под лодкой. Лучи с частотой в 83–50 кГц и шириной 60 и более градусов лучше расходятся «в ширину» и предназначены в основном для поиска рыбы в стороне от лодки.
На современных эхолотах присутствует цифровая обработка сигнала, подстройка параметров его работы по мощности, чувствительности, количеству импульсов ― с таким набором функций вы будете уверены, что на глубине 53 метра плывут именно 10 небольших рыбок, а рельеф дна и плотность грунта точно такие, как показывает картинка на дисплее, а не «приглажены» и «подровнены» несложной программой, как на эхолотах эконом-класса.
Источник: www.vodkomotornik.ru
Модуль подводного ультразвукового дальномера. Часть третья

Самыми значимыми изменениями в проекте, по сравнению с предыдущими версиями сонара (один и два), являются упрощение аналоговой части и эволюция процесса сборки модулей в сторону большей технологичности. Испытаны разные комбинации адгезивов и компаундов для герметизации платы и излучателя внутри корпуса.
Ну и то, что теперь это коммерческий продукт, доведённый до стадии производства.
Производство
Знатно намучившись с очень неудобным Временны́м Регулятором Усиления, не решавшим проблему узкого динамического диапазона, принято решение использовать интегральный логарифмический усилитель. Господи (если ты есть), спасибо тебе и парням из Analog Devices за это чудо! Треть всего функционала сонара, без преувеличения, — это он. Обратная связь? Клиппинг? Самовозбуждение?
Не, не слышал. Наш ответ — AD8310!
Предыдущий вариант тоже рабочий, но с минусами. Во-первых, два каскада активных очень узкополосных фильтров сложно настраивать. Во-вторых, схема регулировки усиления — ею нужно управлять. В-третьих, каскад амплитудного детектирования нелинеен ближе к границам своего динамического диапазона.
У последних двух пунктов характеристики, отчасти, зависят от температуры и разброса параметров ключевых компонентов. Так мы пришли к логарифмическому усилителю. Новый аналоговый тракт обладаем существенным преимуществом — это измерительный прибор с логарифмической шкалой. Это позволяет делать захват всего доступного динамического диапазона (95 дБ) обычным 12 битным АЦП с высокой верностью, а регулировка усиления может быть произведена в пост-обработке на стороне ПО.
Что касается изменений в технологии изготовления. Основное – это решение проблем адгезии.
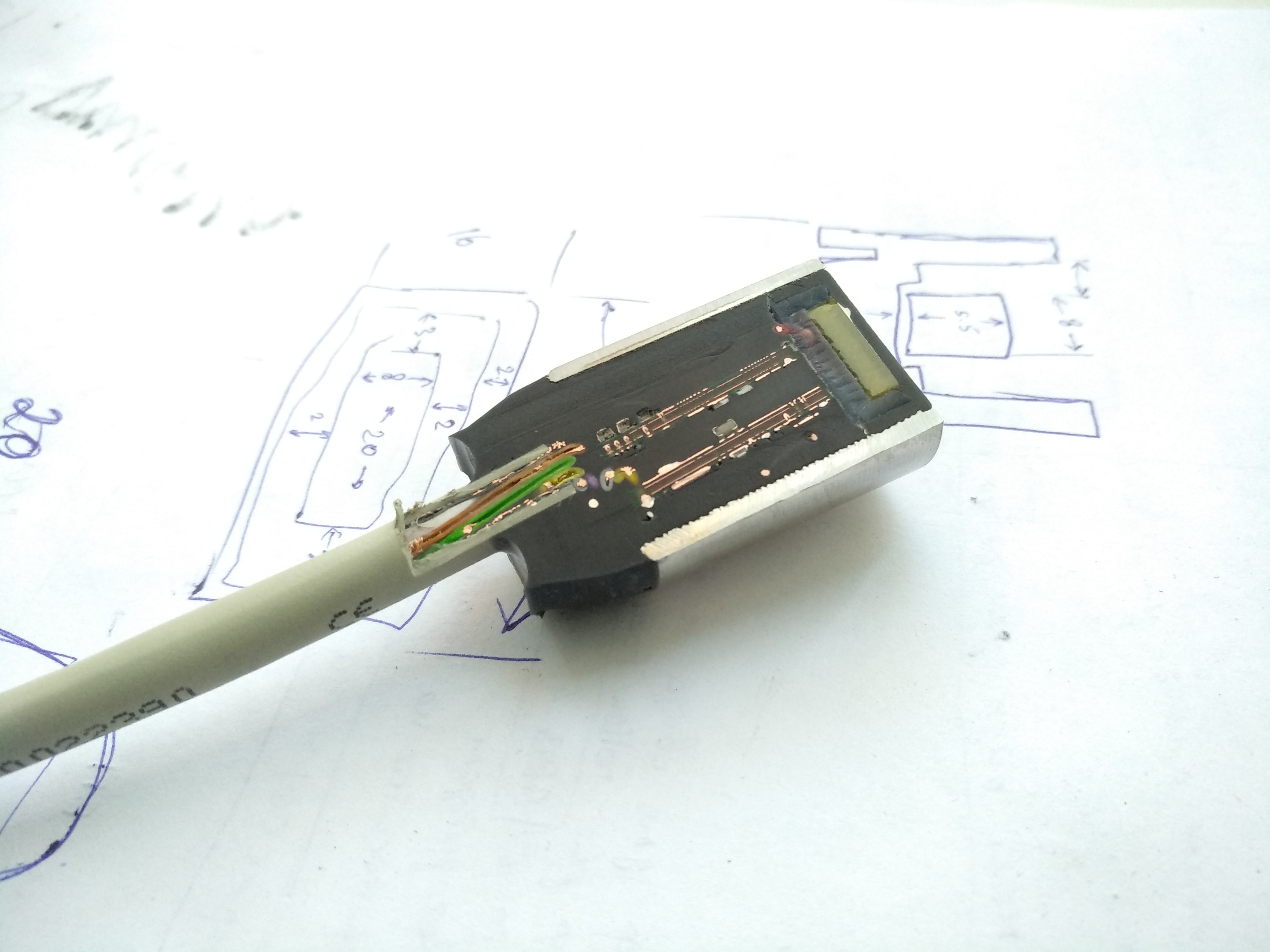
Вопрос адгезии материалов между собой очень важен, поскольку именно этим свойством, в основном, обеспечивается защита от протечек. Внутренности модуля заливаются компаундом и самое слабое место – это примыкание оболочки кабеля к заливочному компаунду, на который возложена главная обязанность по противостоянию давлению и герметизации схемы.
Этот компаунд обязан иметь высокую прочность и хорошую адгезию к компонентам. Дело в том, что внутри кабеля присутствует воздух, который сжимается под давлением, заставляя внешнюю оболочку отрываться от окружающего его компаунда. Решений этой проблемы несколько. Главным действием в нашем случае было использование кабеля в полиуретановой оболочке Helukabel DataPUR-C.
У него наилучшая адгезия к выбранному компаунду из множества протестированных нами кабелей. Та часть кабеля, которая заходит в корпус и заливается компаундом, дополнительно обрабатывается плазмой для ещё большего сцепления с компаундом.
Модуль в разрезе:
Раз уж упомянули экспорт.
Получив опыт экспорта небольших партий за рубеж, до сих пор не понятен смысл постоянного применения Экспортного Контроля к нашей продукции.
Суть в том, что для некоторых категорий товаров используется разрешительный порядок экспортных операций. Это могут быть товары, применение которых возможно не только в гражданской, но и в военной сфере. Например, защищённая ЭВМ. Или болометрическая матрица. Или сонар, как в нашем случае.
Чтобы получить разрешение на экспорт, в первую очередь, товар не должен обладать выдающимися характеристиками. Касательно сонаров – это, например, свойства направленности.
Характеристики нашего продукта, по сравнению с приведёнными в списке ограничений (угловое разрешение 12° против 0,5°), это как поделка первоклассника по сравнению с выпускной работой отличника аспирантуры. Но неудобство создаёт то, что, для отправки сонара новым покупателям (даже физ. лицам) за пределы нашей страны, процедуру Экспортного контроля необходимо проходить каждый раз, несмотря на то, что экспертами уже ранее было подтверждено неприменимость ограничений на вывоз в отношении нашего товара.
Стоимость этой процедуры составляет от 10 тысяч рублей, что ставит крест на привычной интернет-торговле с остальным миром.
Справедливости ради, стоит отметить, что проверяется не только свойства товара, но и причастность покупателя к запрещённым организациям.
Это не только особенность российских таможенных правил, многие страны имеют договорённости по экспортному контролю товаров двойного назначения.
Из нержавеющей стали выполнен корпус сонара, выполняющий также роль экрана для внутренней схемы. Иметь прямого гальванического контакта с элементами схемы он не должен, поэтому соединён с «землёй» через керамический конденсатор, приваренный к корпусу с помощью точечной сварки.
Все отправляемые модули проходят тестирование давлением. Несмотря на заявленную рабочую глубину 100 метров, проверочное давление – 35 Атмосфер (эквивалент почти 350 метров). Как говорится, лучше перебдеть…
Сама установка проверки давлением до предела проста. Источник давления – опрессовщик систем отопления с манометром. Барокамера – отрезок качественной полипропиленовой трубы, с одной стороны которой – штуцер, соединяющий шланг опрессовщика, а с другой – крышка с отверстием и уплотнителем для кабеля испытываемого модуля.
Один из ключевых параметров – диаграмма направленности. В качестве измерительного стенда использовалась конструкция следующего вида:
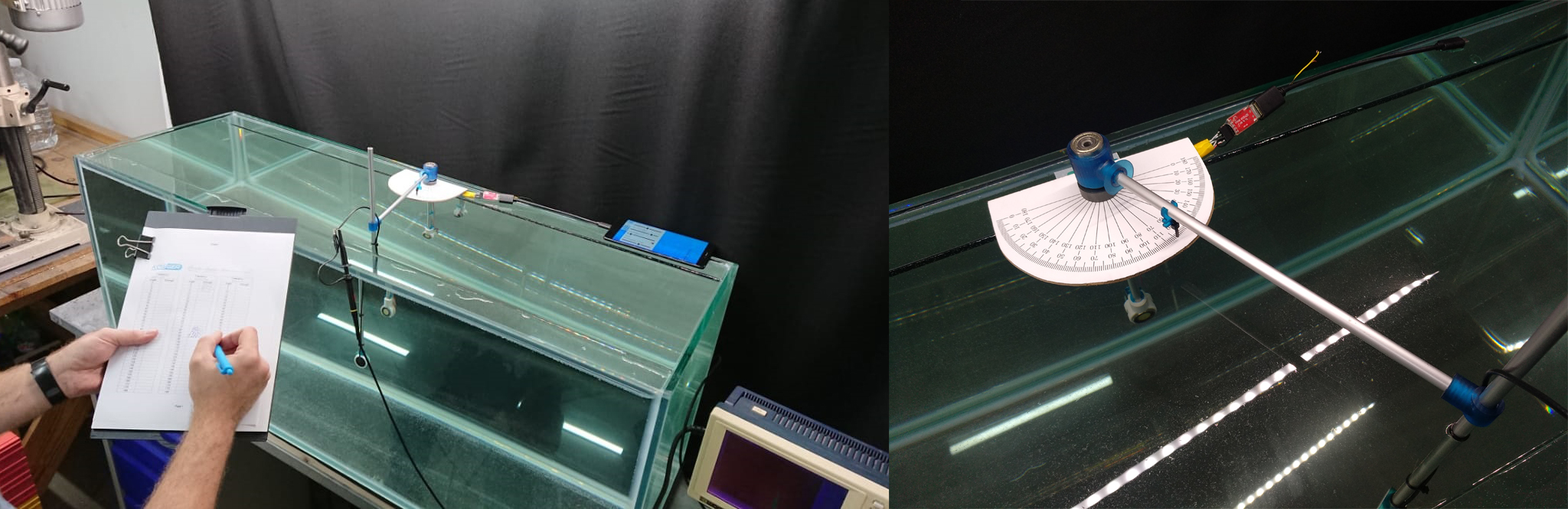
Сонар закреплён в аквариуме стационарно. Подвижная принимаемая антенна расположена на одном уровне с излучателем сонара и имеет возможность поворачиваться в пределах 180° в плоскости перпендикулярной плоскости излучателя. Таким образом мы имеем возможность измерить амплитуду принимаемого акустического сигнала в зависимости от направления приёмника относительно излучателя сонара. Один из выводов сонара был настроен на выход синхроимпульса для осциллографа, чтоб можно было однозначно отличить прямой сигнал сонара от отражённых. Измерения показали угол 12° до уровня половины от максимальной амплитуды принимаемого акустического сигнала.
График на основании полученных данных:

Опыт использования
Наивно полагая, что, бесплатно отправив образцы сонаров тестерам, мы можем получить качественную обратную связь, мы потеряли время и не получили значимых результатов тестирования. Есть ощущение, что у тестеров было бы больше мотивации разобраться с устройством, заплати они хоть 50% стоимости.
Всё-таки, качественная обратная связь – это когда ты сам становишься пользователем своего продукта.
Здесь мы плавно переходим к одному из возможных применений нашего сонара.
До подводных роботов нам пока далеко, но лодку – автопилот для батиметрии мы собрали самостоятельно.
В качестве контроллера автопилота был выбран PixHawk (ПО — ArduPilot).
Лодка движется по предварительно сформированному маршруту. Данные сонара о расстоянии до дна записываются автопилотом на карту памяти вместе с данными с GPS приёмника. Совмещая эти данные возможно составить карту дна водоёма.
В общем виде, схема подключения выглядит следующим образом:

А это — научное исследовательское судно Gretta-2 c установленным оборудованием:
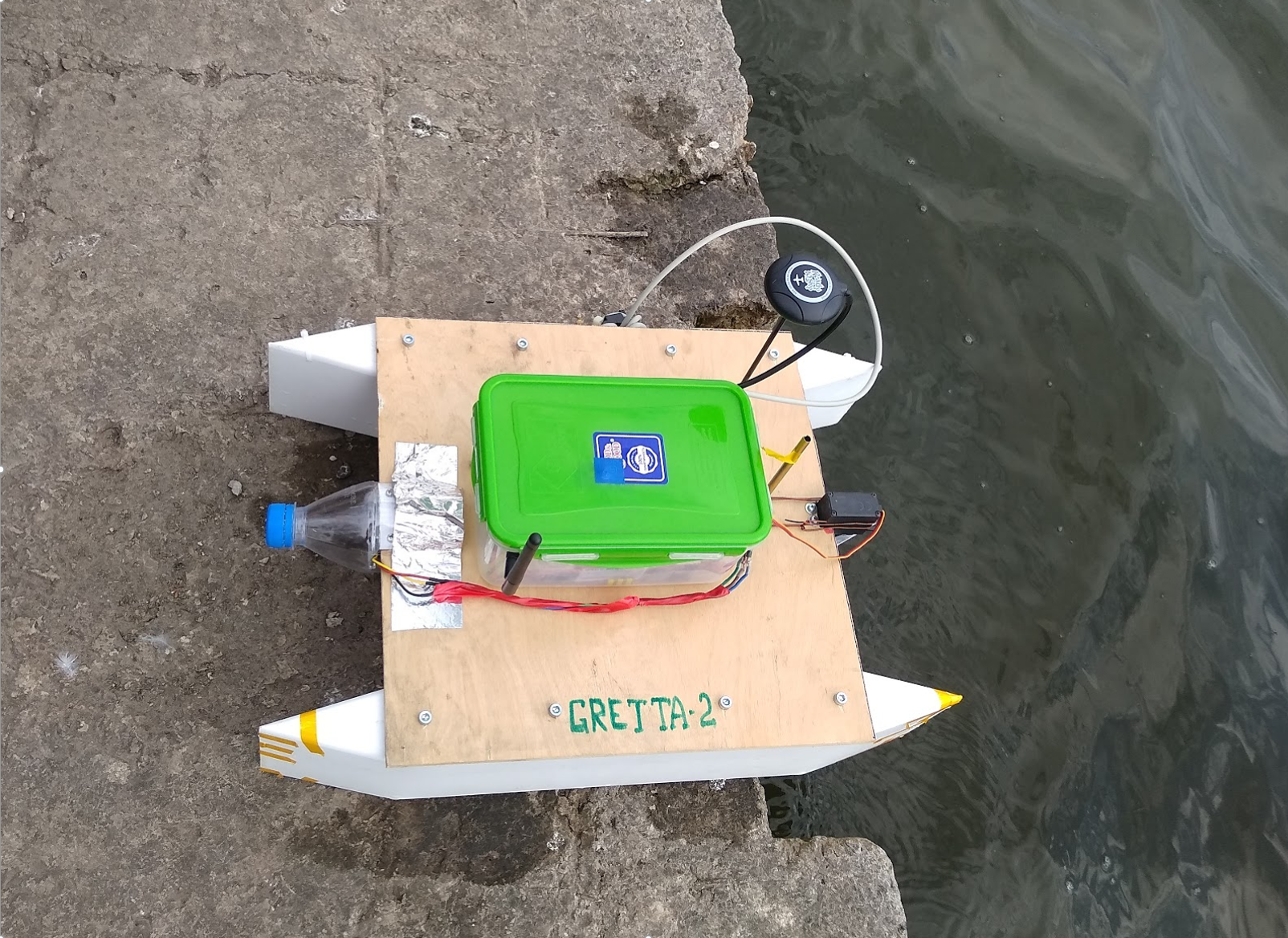
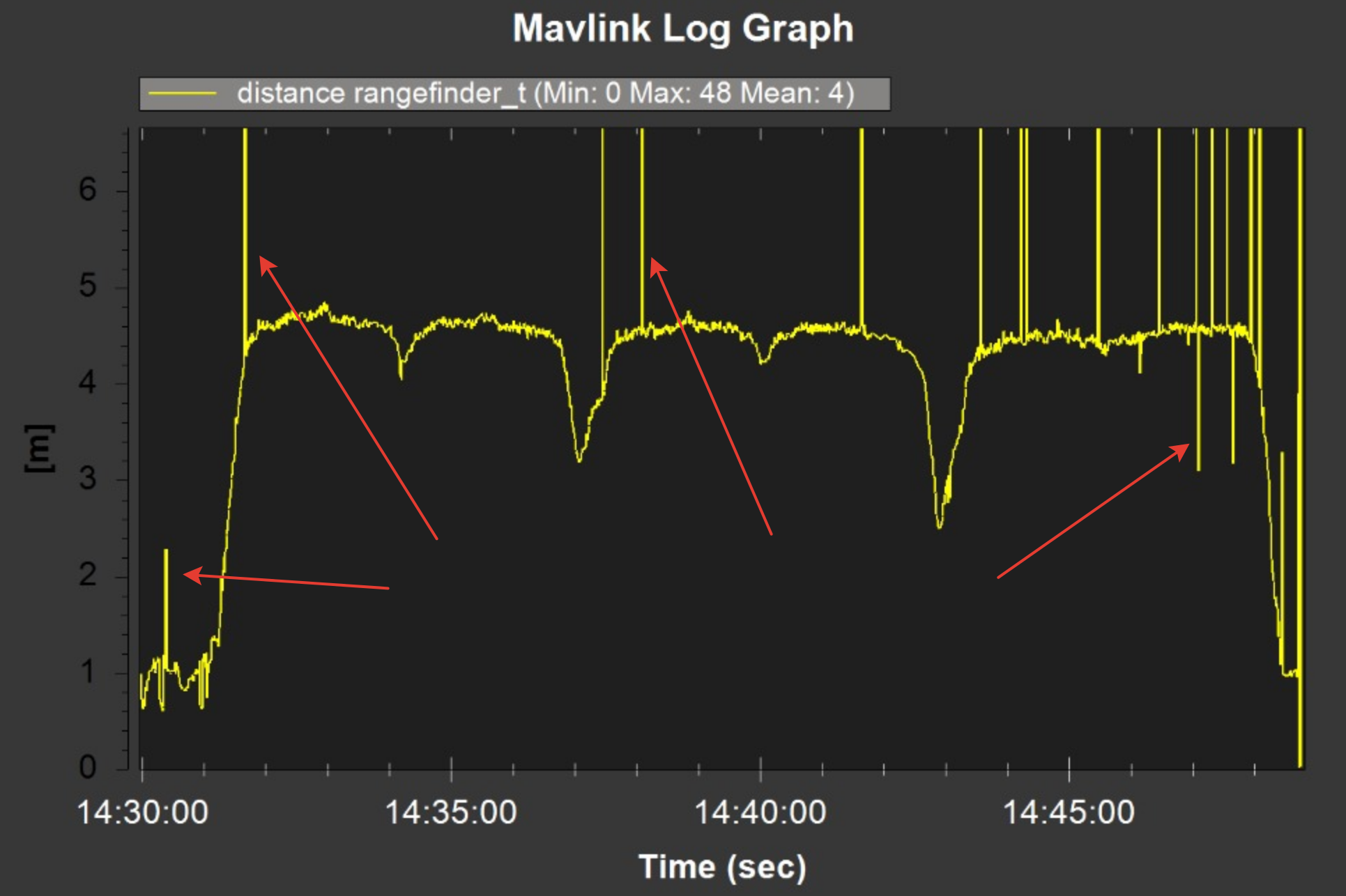
В день тестирования дул сильный ветер, и нашу лоханку прилично колбасило, вследствие чего сонар периодически хватал воздух, что сказывалось на показаниях. На картинке ниже указаны эти аномальные пики на графике измеренной глубины. Так что, желающим повторить подобную конструкцию, следует уделить этому нюансу некоторое внимание.
Испытания в более удачный день позволили получить более точные данные, благодаря которым была построена карта дна небольшой части местного водоёма:

Кстати, в модуле реализовано два типа протокола: бинарный, и текстовый NMEA. Последний поддерживается платформой ArduPilot, поэтому со стыковкой сонара и контроллера автопилота проблем не возникает.
Информацию о том, как предварительно настроить наш сонар для работы в связке с ArduPilot можно посмотреть здесь.
Чтобы проводить опыты с сонаром, не обязательно иметь сложное внешнее оборудование, или обладать продвинутыми навыками программирования. Достаточно иметь Android-смартфон с предустановленным нашим GUI, любой конвертер USB->UART и кабель OTG. Можно менять такие параметры, как частоту излучения, количество импульсов в пачке, период генерации зондирующих импульсов, и много чего ещё. Результат изменения этих параметров сразу виден на экране.
Если смартфон имеет модуль GPS, то можно вести запись данных сонара и данных с GPS самого смартфона.
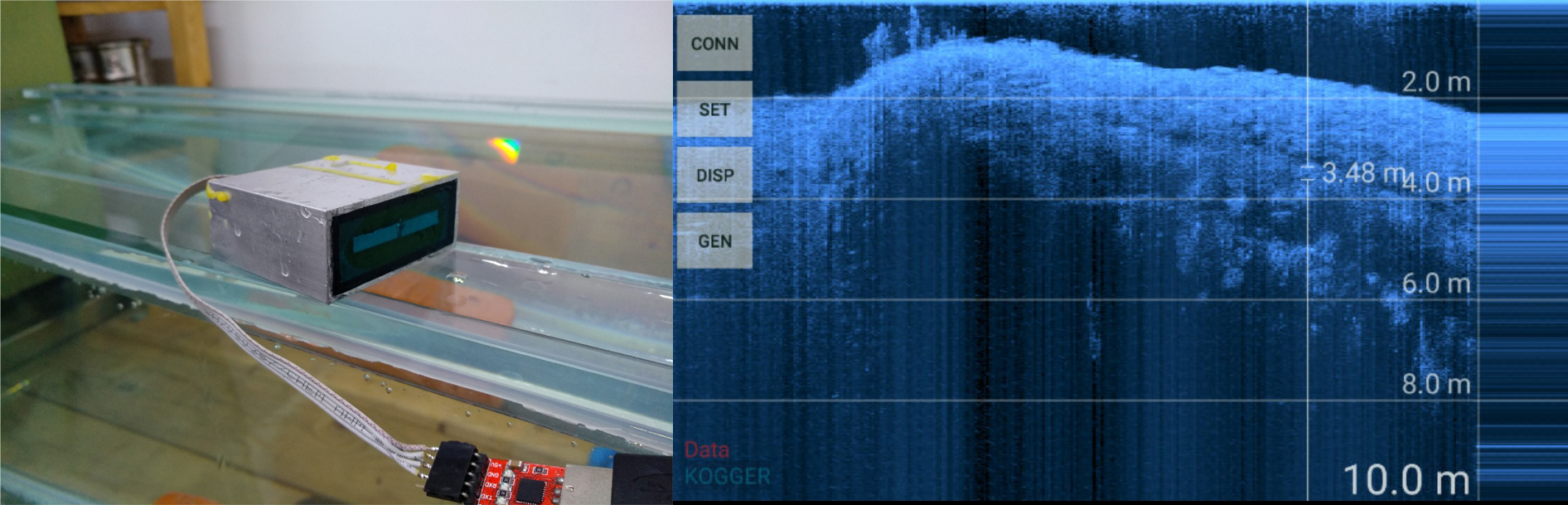
Изменив излучатель с диска на продолговатый параллелепипед, можно из узколучевого сонара получить некое подобие ГБО — гидролокатора бокового обзора. На минималках, конечно.
Хоть небольшая мощность и ультракомпактные размеры не позволят светить на десятки метров, но этого достаточно, чтобы ознакомиться с принципами работы ГБО, поиграться с настройками и мгновенно видеть результат изменения этих настроек.
ГБО на минималках:
Отдельно хотелось бы остановиться на GUI.
Вместе с тем, что он умеет менять параметры работы сонара, писать логи вместе с координатами, отправлять данные на удалённый сервер (фича в разработке), это ещё и опен-сорсный проект, написанный на Java в среде Android Studio. Тем, кто занимается мобильной разработкой и коммуникацией приложения с внешними устройствами, возможно, решения, которые реализованы в нашем приложении, будут полезны.
Ещё бы добавил, что сонар, помимо интерфейса UART, имеет несколько дополнительных дискретны входов/выходов, которые можно использовать, например, для синхронизации массива сонаров и построения подобия локатора с синтетической апертурой. Но это уже совсем другая история…
P.S. Чуть не забыл.
У нас же есть встроенный MEMS IMU.
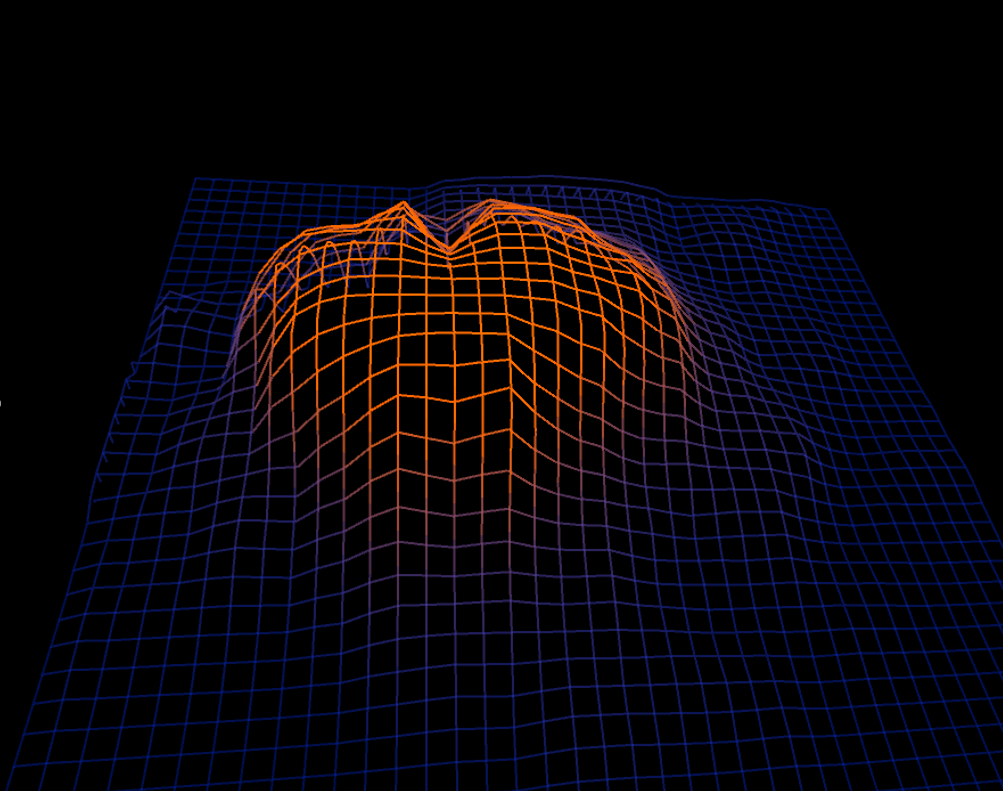
Одновременно с данными об отражениях от объектов, можно получить информацию о направлении, откуда получены эти данные. Такое решение не уникально и существуют готовые сонары сканирующего типа, только ценник начинается от $2k. Если хочется сэкономить, то можно воспользоваться комбинацией бюджетного сонара (как наш) с собственной установкой для поворота.
Вот такие результаты для связки сонара и обычной руки, хаотически двигаемой в направлении исследуемого объекта, можно получить, прибегнув к методам интерполяции (плафон светильника на дне метровой бадьи):
- программирование микроконтроллеров
- разработка электроники
- прототипирование
- схемотехника
- подводная робототехника
Источник: habr.com