Если государство оказывается вовлеченным в военный конфликт, то для достижения скорейшей победы при минимальных потерях использование роботов имеет исключительно важное значение, особенно в современных условиях. Например, использование беспилотной авиации позволяет вести наблюдение за расположением и перемещением сил противника.
Израильские военные нашли для беспилотной авиации остроумное применение. Беспилотный самолет был сконструирован так, чтобы представлять собой удобную цель для радаров. После запуска на вражескую территорию он, естественно, обнаруживался радарами, а израильтяне в свою очередь засекали местоположения этих радаров. После их уничтожения реактивные истребители могли беспрепятственно пролететь через эту территорию.
«Умные» бомбы и крылатые ракеты представляют собой другой пример «интеллектуализованных» вооружений. Мне очень нравятся три закона робототехники, придуманные Айзеком Азимовым, которые гласят, что робот никогда не может намеренно причинить вред человеку, но реальность с ее военными роботами именно такова.
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес
Глава 4. Роботы на суше и на море
Глава 4. Роботы на суше и на море Помимо катеров ВУ Бекаури занимался и морскими минами и торпедами. Для этого в 1926 г. в «Остехбюро» был передан ленинградский завод «Торпедо».[8]Летом 1925 г. в Финском заливе с помощью радиоаппаратуры, установленной на тральщике «Микула»,
МИФЫ И РОБОТЫ
МИФЫ И РОБОТЫ Парадоксы языка типа антиномии «Лжец» часто обыгрывают фантасты. Перед роботом ставится скрытая логическая загадка, любое решение которой противоречит жестоким законам поведения роботов. В такой ситуации робот либо погибает, либо застывает в абсолютной
Роботы-пожарные
Роботы-пожарные Во многих домах имеются огнетушители, а как насчет робота-пожарного? Такой робот может обнаружить возгорание в любой части помещения, самостоятельно переместиться туда и загасить огонь.Идея робота-пожарного оказалась настолько популярной, что уже
Роботы в медицине
Роботы в медицине Роботов, используемых в медицине, можно отнести к трем категориям. Роботы первой категории используются в диагностике. Весной 1992 года компания Neuromedical Systems Inc. of Suffern, NY, выпустила на рынок изделие под названием Papnet. Система Papnet представляет собой
Домашние роботы
Домашние роботы В домашнем хозяйстве роботы могут найти множество различных применений. С помощью роботов можно мыть окна и полы, делать мелкий домашний ремонт, чистить обивку мебели, стирать, готовить и выносить кошачьи экскременты. Здесь возникает интересный
Глава 11 Шагающие роботы
Глава 11 Шагающие роботы Шагающие роботы представляют собой класс роботов, имитирующих передвижение животных или насекомых. Как правило, для передвижения роботы используют механические ноги. Передвижение с помощью ног насчитывает миллионы лет истории. По контрасту,
Глава 13 Подводные роботы
Глава 13 Подводные роботы Робототехника подводных устройств развивается по многим направлениям. Большинство подводных роботов создаются для проведения спасательных операций и исследований. В будущем подводные роботы будут помогать осваивать океан для организации
Введение. Роботы – помощники человека
Введение. Роботы – помощники человека Как только не называют нынешнее столетие – «атомный век», «космический век», «век электроники». С не меньшим основанием можно назвать его веком роботов. Ещё совсем недавно эти устройства существовали лишь на страницах научно –
Космические роботы
Космические роботы В 1822 году великий английский поэт Дж. Байрон писал в своей поэме «Дон Жуан»: «Уж скоро мы, природы властелины, и на Луну пошлём свои машины»… Гениальное пророчество Дж. Байрона сбылось уже во второй половине XX века. Мы являемся очевидцами невиданного
Роботы в сельском хозяйстве
Роботы в сельском хозяйстве Трудно представить, как, например, станет какой – то металлический шкаф «ухаживать» за живой коровой. Всё-таки ферма не цех, где роботу достаточно выполнять заданный набор механических движений. Тут будут рядом с ним беспокойные животные со
Роботы – объекты повышенной опасности
Роботы – объекты повышенной опасности Робот – помощник человека, но слепо доверяться ему нельзя (рис. 8). Те промышленные роботы, которые сейчас трудятся на заводах и фабриках, пока ещё недостаточно сообразительны. Представим, что на линии сборки автомобилей случается
Роботы для Мегамира
Роботы для Мегамира Казалось бы, куда уж дальше, но есть совершенно безграничная область для фантазии роботостроителей – мегамир. В наше время, когда человечество планомерно осваивает ближайшую соседку Земли – Луну, фантасты устремились к звёздам. В одной нашей
Роботы – игрушки
Роботы – игрушки На рис. 81 вы видите модель кибернетического краба, созданную юными техниками в пионерском лагере им. Вити Коробкова (Крымская обл.). Краб двигается на свет электрического фонаря или на солнечный свет, перемещаясь с помощью двух электродвигателей с
Человекоподобные роботы
Человекоподобные роботы Модель простейшего человекоподобного робота с программным управлением показана на рис. 84. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлизированной бумагой и окрашен серебристо – голубой
Промышленные роботы сегодня
Промышленные роботы сегодня Уже давно никто не вспоминает роботов, которых более 60 лет назад Карел Чапек сделал главными героями своей книги «Восстание роботов». Собранные из большого количества жести, заклепок, электрических лампочек, с голосом, как из бочки, а быть
Подводные роботы
Подводные роботы Телеуправляемая система «Соларис» (рис. 10), построенная ВМС США, рассчитана на глубину погружения до 600 м. Рис. 10. Система «Соларис».При помощи этой системы производят поиск и подъем затонувших торпед, ракетных двигателей и головок, а также выполняют
Источник: tech.wikireading.ru
Хочу стать инженером и собрать робота. У меня получится?
Можно подумать, что робототехника — занятие для умников и выпускников физтеха, но это не так. На самом деле простых роботов строят даже младшие школьники, поэтому вам это тоже под силу. Вместе с благотворительным фондом Олега Дерипаски «Вольное дело», реализующим программу по робототехнике для школьников, подростков и студентов, мы сделали простой гид для начинающих инженеров (впрочем, взрослым он тоже вполне может пригодиться). Объясняем, как собрать своего первого робота.
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей.
Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.

Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Если у вас нет профильного образования или опытного наставника, который подробно объяснит, что именно и в какой последовательности устанавливать (и как пользоваться паяльником!), готовьтесь к долгой и кропотливой работе: придется перерыть интернет вдоль и поперек и испортить множество деталей.
Я в ужасе и собираюсь передумать. Нельзя попроще?
Можно. Специально для тех, кто никогда не держал в руках паяльник, но очень хочет попробовать себя в робототехнике, существуют специальные наборы-конструкторы, позволяющие сделать всё то же самое, но быстрее. Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Составы наборов могут быть очень разными, но в каждом есть готовая печатная плата с уже установленным микроконтроллером и всеми дополнительными деталями, которые нужны для решения простых типовых задач. Обычно плату можно напрямую подключить к компьютеру через USB. А дальше среда разработки от производителя поможет сразу же сделать первые шаги в программировании роботов. Например, заставить мигать лампочку на плате.
Теперь всё зависит от вас. Можно, используя готовую плату, реализовать собственный несложный проект: например, сделать машинку, которая движется и останавливается по команде, или гирлянду для новогодней елки. Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
Участники программы «Робототехника», которую поддерживает фонд Олега Дерипаски «Вольное дело», уже через несколько лет обучения могут создавать куда более сложные проекты и придумывают инженерные решения для самых разных задач. Например, разрабатывают системы для автоматической сортировки мусора. Если вам кажется, что всё это очень сложно, вы правы, но научиться этому может каждый.
У меня в школе была двойка по физике, и вообще я гуманитарий. Мне нужно что-то выучить, прежде чем приступать?
Штурмовать учебники необязательно. Конечно, школьная физика пригодилась бы, но если вы ее забыли, не переживайте — вспомните по ходу дела. Для начала просто погуглите, что такое ток, сопротивление, закон Ома, конденсатор, транзистор — пара десятков статей дадут вам базовые представления о радиотехнике, и этого хватит на первое время. Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
А программировать надо уметь?
Если умеете, создание первого робота окажется, возможно, даже слишком легким делом. Если не умеете — отличный повод научиться. Дело в том, что программирование робота — штука очень наглядная: вот вы написали код и сразу же загорелась лампочка.
Вам нужно, чтобы ваш робот разворачивался, когда до стены осталось меньше 5 см, значит, в программе надо прописать такое условие, всё логично. Именно поэтому детей часто начинают учить программированию на примере робототехники: здесь вместо скучных абстракций сразу получается осязаемый результат в реальном мире. На этом принципе строится обучение по программе «Робототехника». Все участники сразу же могут применить полученные знания на практике.
Перед первой попыткой написать программу для робота достаточно разобраться, что такое цикл и условный оператор . Для тех, кому и это кажется слишком сложным, производители конструкторов часто предусматривают визуальные редакторы: там код вообще не нужно писать, всё настраивается перетаскиванием блоков мышкой. Конечно, никакого сложного функционала так не напрограммируешь, но это уже начало. Позже, если захотите заниматься робототехникой углубленно, полезно будет освоить язык С, который чаще всего используется в этой сфере.
Меня случайно не убьет током?
Нет. Если, конечно, вы не собираетесь начать сразу с постройки огромных промышленных роботов. Пока речь идет о небольших игрушках, сила тока и напряжение настолько малы, что даже если вас и ударит, то вы ничего не почувствуете. Самое страшное, что можно сотворить, конструируя маленького робота, — небольшой взрыв на столе. Но это случится, только если вы перепутаете «плюс» с «минусом» во время работы с электролитическим конденсатором.
Самая вероятная неприятность — некоторое количество испорченных деталей, которые вы попытаетесь подсоединить не так и не туда. Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Мой робот сможет защитить меня от врагов? Ну или хотя бы тапочки принести?
Самый первый — вряд ли. Точнее, нет ничего невозможного, но для начала лучше поставить перед собой цель попроще. Например, на базе того же Arduino можно собрать самых разных движущихся роботов: они могут ездить просто вперед-назад, по сложной заданной траектории или по нарисованной линии. Робот, который самостоятельно объезжает препятствия или как-то еще меняет свое поведение при приближении к разным объектам, тоже посильная задача. Еще первый робот вполне сможет включать и выключать что-нибудь, ориентируясь на уровень освещенности, совершать какие-то действия в определенный момент, заданный таймером, или по нажатию кнопки.
Ну а в будущем, если продолжите заниматься робототехникой, сможете сделать и робота-помощника, и робота-охранника, который умеет стрелять. Еще можно собрать робот-пылесос собственной модели. В России и в мире постоянно проводятся соревнования по робототехнике, на которых роботы-участники сражаются, играют в футбол, участвуют в гонках и просто демонстрируют свои выдающиеся способности. Например, на «РобоФесте», который ежегодно организует фонд «Вольное дело», можно увидеть сотни разных роботов.
Умение собирать роботов как-то пригодится мне в жизни?
Да, еще как. Вы неизбежно научитесь программировать. Причем будете в состоянии не просто писать код, который что-то как-то делает, но и понимать всю цепочку, по которой набранные вами на клавиатуре символы преобразуются в действия целого механизма. Уметь программировать в наше время почти так же полезно, как знать английский язык: пригодится, даже если вы маркетолог или продавец мороженого.
Знание робототехники при желании позволит вам здорово усовершенствовать быт и даже сделать свое жилище «умным», не покупая дорогих готовых решений. Световой будильник? Запросто. Лампы с датчиками движения? Да легко.
Чайник, который начинает кипятиться, получив СМС, и передает кондиционеру сигнал охлаждать, а пылесосу пылесосить? Не так легко, но вполне реализуемо.
Где можно узнать больше о роботах?
Можно пройти один из многочисленных, в том числе совершенно бесплатных онлайн-курсов. Можно выбрать курс, посвященный Arduino, — как, например, этот от МФТИ, или начать с Lego. А можно не привязываться к конкретной платформе и учиться робототехнике в целом — например, на этом курсе от Бауманки. Ну а если вы знаете английский, буквально вся Coursera с программами по робототехнике от ведущих мировых университетов к вашим услугам.
А если мне понравится и я захочу сделать это своей профессией? Куда податься?
Самое очевидное решение — в программисты. Причем не обязательно туда, где работают непосредственно с «железом»: навыки, полученные во время занятий робототехникой, пригодятся в любой сфере — от промышленного до веб-программирования.
Если возникнет желание связать свою дальнейшую судьбу именно с роботами, придется получить соответствующее высшее образование. Специальность «Робототехника и мехатроника» уже появилась во многих технических вузах — в Москве это МГТУ имени Баумана, МИФИ, МЭИ, МИРЭА. Подойдет и факультет радиотехники: большинство нынешних специалистов по робототехнике получали именно такое образование.
Источник: knife.media
Как сделать робота?
Сделать робота очень просто Давайте разберемся, что же потребуется чтобы создать робота в домашних условиях, для того чтобы понять основы робототехники.
Наверняка, насмотревшись фильмов про роботов, тебе не раз хотелось построить своего боевого товарища, но ты не знал с чего начать. Конечно, у тебя не получится построить двуногого терминатора, но мы и не стремимся к этому. Собрать простого робота может любой, кто умеет правильно держать паяльник в руках и для этого не нужно глубоких знаний, хотя они и не помешают.
Любительское роботостроение мало чем отличается от схемотехники, только гораздо интереснее, потому что тут так же затронуты такие области, как механика и программирование. Все компоненты легкодоступны и стоят не так уж и дорого. Так что прогресс не стоит на месте, и мы будем его использовать в свою пользу.
Введение
Итак. Что же такое робот? В большинстве случаев это автоматическое устройство, которое реагирует на какие-либо действия окружающей среды. Роботы могут управляться человеком или выполнять заранее запрограммированные действия. Обычно на роботе располагают разнообразные датчики (расстояния, угла поворота, ускорения), видеокамеры, манипуляторы.
Электронная часть робота состоит из микроконтроллера (МК) – микросхема, в которую заключён процессор, тактовый генератор, различная периферия, оперативная и постоянная память. В мире существует огромное количество разнообразных микроконтроллеров для разных областей применения и на их основе можно собирать мощных роботов.
Для любительских построек широкое применение нашли микроконтроллеры AVR. Они, на сегодняшний день, самые доступные и в интернете можно найти много примеров на основе этих МК. Чтобы работать с микроконтроллерами тебе нужно уметь программировать на ассемблере или на Cи и иметь начальные знания в цифровой и аналоговой электронике. В нашем проекте мы будем использовать Cи. Программирование для МК мало чем отличается от программирования на компьютере, синтаксис языка такой же, большинство функций практически ничем не отличаются, а новые довольно легко освоить и ими удобно пользоваться.
Что нам нужно
Для начала наш робот будет уметь просто объезжать препятствия, то есть повторять нормальное поведение большинства животных в природе. Всё что нам потребуется для постройки такого робота можно будет найти в радиотехнических магазинах. Решим, как наш робот будет передвигаться.
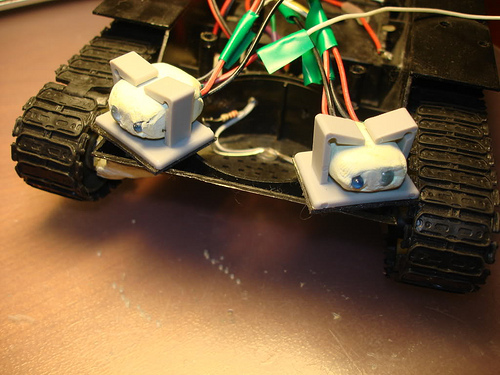
Самым удачным я считаю гусеницы, которые применяются в танках, это наиболее удобное решение, потому что гусеницы имеют большую проходимость, чем колёса машины и ими удобнее управлять (для поворота достаточно вращать гусеницы в разные стороны). Поэтому тебе понадобится любой игрушечный танк, у которого гусеницы вращаются независимо друг от друга, такой можно купить в любом магазине игрушек по разумной цене. От этого танка тебе понадобится только платформа с гусеницами и моторы с редукторами, остальное ты можешь смело открутить и выкинуть. Так же нам потребуется микроконтроллер, мой выбор пал на ATmega16 – у него достаточно портов для подключения датчиков и периферии и вообще он довольно удобный. Ещё тебе потребуется закупить немного радиодеталей, паяльник, мультиметр.
Делаем плату с МК
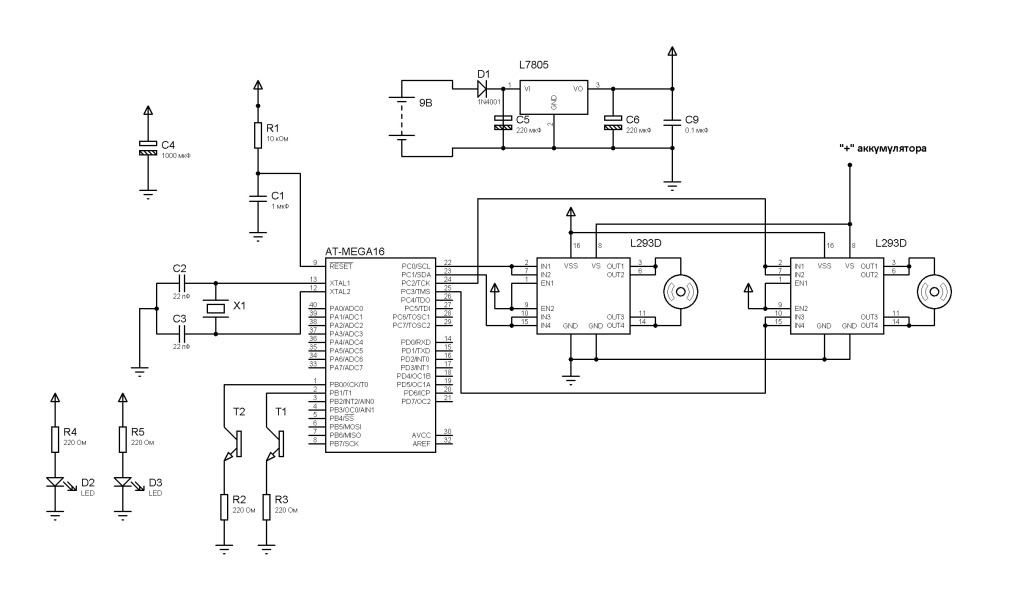
В нашем случае микроконтроллер будет выполнять функции мозга, но начнём мы не с него, а с питания мозга робота. Правильное питание – залог здоровья, поэтому мы начнём с того, как правильно кормить нашего робота, потому что на этом обычно ошибаются начинающие роботостроители. А для того, чтобы наш робот работал нормально нужно использовать стабилизатор напряжения.
Я предпочитаю микросхему L7805 – она предназначена, чтобы на выходе выдавать стабильное напряжение 5В, которое и нужно нашему микроконтроллеру. Но из-за того, что падение напряжения на этой микросхеме составляет порядка 2,5В к нему нужно подавать минимум 7,5В. Вместе с этим стабилизатором используются электролитические конденсаторы, чтобы сгладить пульсации напряжения и в цепь обязательно включают диод, для защиты от переполюсовки.
Теперь мы можем заняться нашим микроконтроллером. Корпус у МК — DIP (так удобнее паять) и имеет сорок выводов. На борту имеется АЦП, ШИМ, USART и много другого, что мы пока использовать не будем. Рассмотрим несколько важных узлов. Вывод RESET (9-ая нога МК) подтянут резистором R1 к «плюсу» источника питания – это нужно делать обязательно!
Иначе твой МК может непреднамеренно сбрасываться или, проще говоря – глючить. Так же желательной мерой, но не обязательной является подключение RESET’а через керамический конденсатор C1 к «земле». На схеме ты так же можешь увидеть электролит на 1000 мкФ, он спасает от провалов напряжения при работе двигателей, что тоже благоприятно скажется на работе микроконтроллера. Кварцевый резонатор X1 и конденсаторы C2, C3 нужно располагать как можно ближе к выводам XTAL1 и XTAL2.
О том, как прошивать МК, я рассказывать не буду, так как об этом можно прочитать в интернете. Писать программу мы будем на Cи, в качестве среды программирования я выбрал CodeVisionAVR. Это довольно удобная среда и полезна новичкам, потому что имеет встроенный мастер создания кода.
Управление двигателями
Не менее важным компонентом в нашем роботе является драйвер двигателей, который облегчает нам задачу в управлении им. Никогда и ни в коем случае нельзя подключать двигатели напрямую к МК! Вообще мощными нагрузками нельзя управлять с микроконтроллера напрямую, иначе он сгорит. Пользуйтесь ключевыми транзисторами. Для нашего случая есть специальная микросхема – L293D.
В подобных несложных проектах всегда старайтесь использовать именно эту микросхему с индексом «D», так как она имеет встроенные диоды для защиты от перегрузок. Этой микросхемой очень легко управлять и её просто достать в радиотехнических магазинах. Она выпускается в двух корпусах DIP и SOIC. Мы будем использовать в корпусе DIP из-за удобства монтажа на плате.
L293D имеет раздельное питание двигателей и логики. Поэтому саму микросхему мы будем питать от стабилизатора (вход VSS), а двигатели напрямую от аккумуляторов (вход VS). L293D выдерживает нагрузку 600 мА на каждый канал, а этих каналов у неё два, то есть к одной микросхеме можно подключить два двигателя.
Но, чтобы перестраховаться, мы объединим каналы, и тогда потребуется по одной микре на каждый двигатель. Отсюда следует, что L293D сможет выдержать 1.2 А. Чтобы этого добиться нужно объединить ноги микры, как показано на схеме.
Микросхема работает следующим образом: когда на IN1 и IN2 подаётся логический «0», а на IN3 и IN4 логическая единица, то двигатель вращается в одну сторону, а если инвертировать сигналы – подать логический ноль, тогда двигатель начнёт вращаться в другую сторону. Выводы EN1 и EN2 отвечают за включение каждого канала. Их мы соединяем и подключаем к «плюсу» питания от стабилизатора. Так как микросхема греется во время работы, а установка радиаторов проблематична на этот тип корпуса, то отвод тепла обеспечивается ногами GND — их лучше распаивать на широкой контактной площадке. Вот и всё, что на первое время тебе нужно знать о драйверах двигателей.
Датчики препятствий
Чтобы наш робот мог ориентироваться и не врезался во всё, мы установим на него два инфракрасных датчика. Самый простейший датчик состоит из ик-диода, который излучает в инфракрасном спектре и фототранзистор, который будет принимать сигнал с ик-диода. Принцип такой: когда перед датчиком нет преграды, то ик-лучи не попадают на фототранзистор и он не открывается.
Если перед датчиком препятствие, тогда лучи от него отражаются и попадают на транзистор – он открывается и начинает течь ток. Недостаток таких датчиков в том, что они могут по-разному реагировать на различные поверхности и не защищены от помех — от посторонних сигналов других устройств датчик, случайно, может сработать. От помех может защитить модулирование сигнала, но пока мы этим заморачиватся не будем. Для начала, и этого хватит.
Прошивка робота
Чтобы оживить робота, для него нужно написать прошивку, то есть программу, которая бы снимала показания с датчиков и управляла двигателями. Моя программа наиболее проста, она не содержит сложных конструкций и всем будет понятна. Следующие две строки подключают заголовочные файлы для нашего микроконтроллера и команды для формирования задержек:
Следующие строки условные, потому что значения PORTC зависят от того, как ты подключил драйвер двигателей к своему микроконтроллеру:
PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0; Значение 0xFF означает, что на выходе будет лог. «1», а 0x00 – лог. «0». Следующей конструкцией мы проверяем, есть ли перед роботом препятствие и с какой оно стороны: if (!(PINB
Как сделать боевого робота
/***************************************************** Прошивка для робота Тип МК : ATmega16 Тактовая частота : 16,000000 MHz Если у тебя частота кварца другая, то это нужно указать в настройках среды: Project -> Configure -> Закладка «C Compiler» *****************************************************/ #include #include void main(void) < //Настраиваем порты на вход //Через эти порты мы получаем сигналы от датчиков DDRB=0x00; //Включаем подтягивающие резисторы PORTB=0xFF; //Настраиваем порты на выход //Через эти порты мы управляем двигателями DDRC=0xFF; //Главный цикл программы. Здесь мы считываем значения с датчиков //и управляем двигателями while (1) < //Едем вперёд PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0; if (!(PINB if (!(PINB >; >
О моём роботе
В данный момент мой робот практически завершён.

На нём установлена беспроводная камера, датчик расстояния (и камера и этот датчик установлены на поворотной башне), датчик препятствия, энкодер, приёмник сигналов с пульта и интерфейс RS-232 для соединения с компьютером. Работает в двух режимах: автономном и ручном (принимает сигналы управления с пульта ДУ), камера также может включаться/выключаться дистанционно или самим роботом для экономии заряда батарей. Пишу прошивку для охраны квартиры (передача изображения на компьютер, обнаружение движений, объезд помещения).
Также о разработке собственного робота можно узнать на сайте myROBOT.ru.
- Теория и практика / Робототехника
- 2014-10-29
- 52 814
Источник: neuronus.com
Как собрать робота самостоятельно в домашних условиях: от простого к сложному
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Самостоятельно собранный робот, реагирующий на источник света, может стать прототипом робота-плантатора НЕХА, который будет «гоняться» за солнечным светом, столь необходимым для домашних растений.
Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Конфигурация «светолюбивого» робота может быть любой и зависеть от наличия необходимых материалов, предпочтений и фантазии создателя.
Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Создание робота, способного различать препятствия, — первый серьезный шаг к профессии будущего.
Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Источник: robotportal.ru
Как правильно:Создать огромного боевого робота
Сейчас, когда проблема обороноспособности Отечества от Ктулху (по другой версии — от Путина, подробнее смотри ООО «Ктулху» (ООО «Путин»)) стоит так остро, как угол между параллельными прямыми, чрезвычайно важен вопрос быстрого производства огромных боевых роботов. Новейшие разработки Путинсбургского Института Носкитологии и Огромных-боевых-Ктулхов (сокр.
ПИНОК) в содействии с Путинбургским Университетом Ктулхологии (сокр. ПУК) позволяют каждому, кто имеет достаточную сноровку (шнуровку) и чей моск (носк) ещё никто (кое-кто) не схавал, собрать огромного боевого робота в домашних условиях, что жизненно необходимо для партизанского движения в случае тотальной подводной войны (см. Гитлер). Ниже приведено подробное руководство по созданию огромных боевых роботов любой конструкции.
Итак, RTFM, Ктулху в помощь!
- 1 Оборудование рабочего места
- 2 Пятки — надежда и опора
- 3 Нога — всему голова
- 4 Корпус — хранилище души и сердца
- 5 Руки — орудие буржуазии
- 6 Голова — ничему не ноги
- 6.1 Шея — это пять
- 6.2 Челюсть — не инструмент зохава
- 6.3 Черепушка — шлем некроманта
- 6.4 Глаза — зеркало души
Оборудование рабочего места
Выйди в чисто поле.
Крикни что есть мочи.
Чё орёшь, придурок?
Шило в попе что ли?
~ пилот огромного боевого робота на утреннем дежурстве во время лёгкого завтрака под лучами восходящего солнца про звуки, которые доносятся из стогов на сеновале неподалёку, многократно отражаясь от пластин брони
Для работы нам понадобятся следующие вещи:
- Много места
- Много рабочего места
- Много рабочего места, пригодного не только для собираемого робота, но и для его сборки
- Голова на плечах
- Мозг
- Плечи с большим запасом прочности (на случай распухания головы по причине фрустрации и неудачного тест-запуска робота)
- Золотые или откуда-надо-растущие руки
- Гвоздики, винтики, шурупики, болтики, гаечки, саморезики, гречневая каша, дюбелёчки, крючочки, колечки, тампончики, зажимчики Коххера, трубочки, клюшечки, тросточки, тростиночки, тросточки-тростиночки, уголки, шестерёнки, шестерни, пятёрёнки, пятерни, килограммы, простофили, мегаметры и промили, проволока и жевачка, карандаш и рубль сдачи, калькулятор, фхтангенциркуль, кувалда, коллайдер, батарейка и кондуктор, конденсатор, склад рубашек и носкитский царь впридачу.
- Благословение Ктулху.
- Это руководство.
Итак, когда вы достали все необходимые компоненты (уж не знаю, где вы возьмёте фхтангенциркуль, царя носкитов и благословение Ктулху, но мне на это пофигу — прим. ред.), необходимо разложить их на полу (или развесить на верёвочке). Рабочее место готово, можно приступать непосредственно к строительству.
Пятки — надежда и опора
Ты как всегда прав, Пятачок!
Общепризнанно, что робот должен быть человекообразным. Нечеловекообразный робот — не тру. Человек стоит на ногах, а ноги стоят на пятках. Поэтому любой робот (особенно огромный боевой человекообразный) должен иметь в своей конструкции как минимум две пятки.
Пятки делаются из какого-либо прочного материала в виде большого уголка. На его концах надо составить крепления для собственно ноги и для ступни.
Не забывайте, что пятка используется не только как точка опоры, но и как ударный инструмент. В настоящее время наиболее популярными являются следующие модели пяток для боевых роботов:
- MS_OBR_Pyatka.Chuck, назваванная так в честь Чака Норриса. Не вдаваясь во внутреннее строение (потому как самому собирать не надо — можно купить на радиорынке), скажем, что это поистине адское устройство моделирует удар ногой с разворота.
- MS_OBR_Pyatka.Ya_popka_durak. Почему так названа — неизвестно, однако известно, что моделирует удар деревянной ногой с разворота самого капитана Флинта.
Нога — всему голова
Схема сгибательного механизма ноги огромного боевого робота
Ноги… крылья… главное — хвост!
~ классика про ноги
Пятки — это, конечно, хорошо, но если они будут просто стоять на земле, толку от них будет немного. Поэтому роботу нужны ноги для перемещения пяток.
Чтобы понять, как устроены ноги, согните свою. А теперь в другую сторону. Не получается? Теперь принцип должен быть понятен. Если согнулась — тем более.
Наиболее широко используются следующие типы ног для огромных боевых роботов:
- Нога прямоходящая — не складывается, на ногу не похожа, нафиг не нужна, но производитель слёзно умолял добавить в список.
- Нога складная — нормальная нога, добавлена для того, чтобы превратить предыдущий пункт в список.
- Многосуставная нога (тентакль) — тоже нормальная нога, добавлена для того, чтобы отработать благословение Ктулху.
Корпус — хранилище души и сердца

Ипподром закрытого типа для огромного боевого робота
Пока они разговаривали, послышался грохот, от которого пришёл в содрогание огромный корпус шаттла, — это боевые роботы тринария Джоанны отшлюзовались…
~ Яндекс про корпус огромного боевого робота
Корпус — основная часть огромного боевого робота, которым он ловит пролетающие мимо ракеты. Внутри корпуса находится большое количество сферических ипподромов, оснащённых несколькими (от 1 до 5) сферическими конями, каждый из которых помещён в колбочку из которой высосан воздух (или йад), то есть в вакуум, для обеспечения поворота корпуса вокруг своей оси. Роботы старых моделей могли поворачивать корпус только по часовой стрелке, но впоследствие была успешна решена задача синхронизации разнонаправленных ипподромов, что позволило роботам вращать им произвольно. Добавление управляющего модуля Жокей-6 производства фабрики «Инфракрасный Октябрь» устранило проблему произвольности вращения.

Ипподром открытого типа для огромного боевого робота
Чтобы сделать корпус огромного боевого робота своими руками, возьмите огромную боевую консервную банку (хорошо подходит банка из под сгущённого вакуума) и дополнительно растяните её в несколько сот раз. Не беспокойтесь о толщине стенок — броня будет установлена отдельно. После этого понатыкайте вовнутрь ипподромов (спросите у Ипполита, как), запустите в них сферических коней согласно выбранной модели, поставьте USB-синхронизатор и подключите к ногам. Теперь робот уже может вращать корпусом, но он ни за что не будет этого делать, пока вы не подключите ему моск.
Руки — орудие буржуазии
Мимо быстро пролетает
чья-та правая рука —
Это наш тебе подарок —
трупик и бензопила.
~ Народное творчество
Нам разум дал
Стальные руки-крюки,
А вместо сердца —
Каменный топор.
~ Роботы про разум.
Чтобы ваш робот был действительно человекообразным, ему не хватает только рук (голова не нужна, вспомните Безбашенного Всадника). Руки делаются точно так же, как и ноги, разве что ещё надо пальцы приделать.
Голова — ничему не ноги

Голова огромного боевого робота
В голове моей опилки — да! да! да!
Головы огромных боевых роботов легко достать на чёрном рынке, вам остаётся только прикрутить их к консервной банкекорпусу. Однако опыт многих поколений показал, что с головой у многих проблемы, поэтому мы решили рассказать о её устройстве поподробнее.
Шея — это пять
Их сбежавший боевой робот изучал нравы людей, больше всего хотел покоя, а защищаясь, надевал своему коллеге-роботу сиденье от унитаза на шею.
~ Яндекс про шею огромного боевого робота
На самом деле, пять шей не надо, хватит и одной. Делается она точно так же, как и Корпус, разве что банку растягивать не надо.
Челюсть — не инструмент зохава
Теоретически старейшина Хокинав подгадал точно, отправив нас к концу ежегодного чемпионата боевых роботов, проводившегося в Волчьей Челюсти.
~ Яндекс про челюсть огромного боевого робота
Челюсть — декоративный компонент, прикрывающий место сцепления шеи и черепушки. Делается из готского ошейника (одного хватает на две челюсти) или из решётки радиатора автомобиля. За челюстью также может быть помещён язык. Внимание: если захваченный язык — немец, то он, скорее всего, будет молчать или требовать пива и сосисок.
Черепушка — шлем некроманта

Внутренность головы огромного боевого робота
Наш любимый мультик — про черепушек-ниндзя.
~ Девочки-волшебницы про черепушки
Черепушка — не пушка. Это череп. Но не череп ушка. В ушах вообще костей нет.
Как вы уже, наверное, догадались, череп тоже делается из консервных банок. Единственной отличие — внутрь не надо пихать ипподромов, потому что шея у нас уже есть. Вместо этого поставьте туда компьютер, кресло и антенну. Не забудьте про коврик для мыши и мегафон!
Глаза — зеркало души
Если так, на глазок, прикидывать… то это примерно 0 , 0613 ∗ π ∗ e 4 2 γ 3 ]><2gamma >>>>
Схема надстройки глаза огромного боевого робота
На самом деле, делать глаза из зеркал неразумно, потому что робот ничего не увидит. Поэтому глаза делаются обычно из стекла или человеческих глаз. Но так как это всё равно не даёт необходимой мощности, к ним приделывают всевозможные надстройки, такие как:
- Объективы фотографических аппаратов
- Веб-камеры
- Телекамеры
- Газовые камеры
- Телескопы
- Спироскопы
- Хироскопы
- Капитана Флинта с подзорной трубой
- Черные дыры
Броня

Старый бронированный робот
Броня крепка и танки наши быстры
~ Марш советских танкистов
Созданный нами робот уже довольно силён, но ещё недостаточно защищён. Чтобы исправить это досадное недоразумение, необходимо навесить на него броню. Для этого найдите какой-нибудь заброшенный самолётный ангар и распилите его на части, после чего прибейте её болтами к корпусу вашего огромного боевого робота.
Это обеспечит защиту корпусу вашего робота, но остальные его части по прежнему в опасности. Чтобы устранить её, покрасьте руки и голову в маскировочный цвета (например, в красный — никто не поймёт, что это за штука такая), а на ноги наденьте носки. В случае попадания в ноги снаряда будут уничтожены поселившиеся там носкиты, хотя в большинстве случаев по такому живому щиту никто не даст стрелять (или возникнет ещё один из гринписовцев, среди которых легко спрятать ремонтников).
Последние штрихи
По окончании тренировки произведите контрольный последний штрих по голове жертвы.
~ Адольф Алоизович. «Изображая жертву»
Теперь, когда ваш робот готов и стоит в чистом поле, вы можете взглянуть на своё творение со стороны. Двигаться оно всё равно не будет, да и где вы видели боевых роботов, собранных из консервных банок?
Можете засеять поле вокруг и использовать робота в качестве пугала.
- Как правильно
- Огромные боевые человекоподобные роботы
Источник: absurdopedia.net