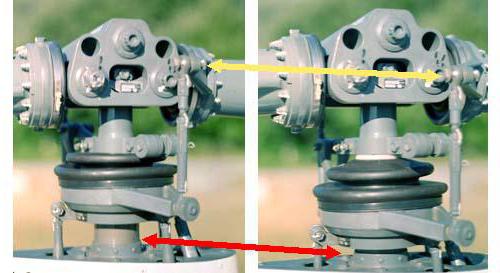
Наклон автомата перекоса производится посредством тяг, присоединенных к невращающемуся кольцу, отстоящих друг от друга на 90º по азимуту. Каждая из этих тяг является конечным звеном проводки продольного или поперечного управления.
Независимость перемещения тяг продольного и поперечного управления обеспечивается их шарнирным креплением в плоскости перпендикулярной к валу (при неотклоненном автомате перекоса), и совмещением с центром качания кардана или шарового шарнира. Чтобы свести к минимуму отклонение тарелки автомата перекоса при изменении общего шага несущего винта, тяги, идущие к качалкам продольного и поперечного управления, выполняют максимально длинными.
На рисунке 81 изображен автомат перекоса на кардане, разработанный российским ученым Юрьевым. Внутреннее неподвижное кольцо 12 автомата перекоса при помощи карданной подвески 3 крепится к кожуху вала. Наружное кольцо 2 автомата перекоса с помощью шарикоподшипников соединено с внутренним неподвижным кольцом и вращается.
Вертолёты — автомат перекоса
Тягами 4 наружное кольцо соединено с лопастями несущего винта и вращается вместе с ними и валом винта. Потянув с помощью ручки управления тягу 7, одновременно подается вверх тяга 10, летчик наклоняет вперед неподвижное, а вместе с ним и подвижное кольца автомата перекоса.
Тяга 4 подается вниз, лопасть 5 поворачивается относительно осевого шарнира 9, угол установки лопасти уменьшается, и подъемная сила также уменьшается. У двух других лопастей угол установки, наоборот, увеличивается. Тяги 4, при наклоне кольца автомата перекоса, подаются вверх. Разница в подъемной силе лопастей наклоняет тягу несущего винта.
Поскольку винт вращается, угол установки лопастей будет меняться периодически по азимуту. Меньший угол будет каждый раз у той лопасти, которая в данный момент находится в направлении полета. Пока, воздействуя на ручку управления, летчик не изменит наклона колец автомата перекоса.
Рисунок 81. Автомат перекоса Юрьева. 1 – основание автомата перекоса, 2 – наружное кольцо, 3 – ось карданной подвески, 4 – тяги, 5 – лопасть, 6 – шлицшарнир, 7 – тяга продольного управления, 8 – тяга управления общим шагом, 9 – осевой шарнир, 10 – тяга поперечного управления шагом, 11 – рычаг лопасти, 12 – внутреннее кольцо, 13 – вал несущего винта.
Неизменяемость взаиморасположения по азимуту втулки и вращающегося кольца автомата перекоса обеспечивается шлиц-шарниром 6. Он является также поводком для вращающегося кольца. Если же летчик воздействует на рычаг общего шага, опускается или поднимается тяга 8, а вслед за ней основание 1 автомата перекоса вместе с внутренним и наружным кольцами. Это вызывает общее изменение угла установки, одинаковое у всех лопастей. Соответственно, происходит изменение силы тяги винта без наклона этой силы в ту или иную сторону. 111
На рисунке 82 показана конструкция автомата перекоса кольцевого типа на кардане в разрезе. Рисунок 82. Конструкция автомата перекоса на кардане в разрезе. 1 – шлиц-шарнир, 2 – подшипники, 3 – вращающееся кольцо, 4 — тяга, 5 – рычаг, 6 — кронштейн, 7 – невращающееся кольцо. Автомат перекоса на шаровой основе (рисунок 83), в целом, аналогичен устройству на кардане.
Использование в кинематической схеме шарового шарнира уменьшает массу и габариты. Управление автоматом перекоса осуществляется гидроусилителями, шарнирно соединенными непосредственно с невращающейся тарелкой. Он устанавливается на главном редукторе. На ползуне крепится сферическая опора, служащая для обеспечения наклона тарелки автомата перекоса. Изменение тяги несущего винта, одновременно по всем азимутам, осуществляется путем перемещения ползуна по направляющей (изменение общего шага).
Рисунок 83. Схема автомата перекоса на шаровой опоре. 1 — шлиц-шарнир невращающегося кольца, 2 — шаровой шарнир, 3 — шлиц-шарнир вращающегося кольца, 4 — тяга, 5 — вращающееся кольцо, 6 — невращающееся кольцо, 7 — радиально-упорный двухрядный подшипник, 8 — тяги продольного и поперечного управления.
Кинематическая схема управления несущего винта может быть выполнена таким образом, что при управлении несущим винтом одновременно работает три гидроусилителя. Подобная кинематическая схема управления несущего винта позволяет обеспечить полную независимость каналов управления несущего винта и уменьшить потребные усилия на штоках силовых гидроусилителей. Пример такой схемы показан на рисунке 84. Автоматы перекоса типа «паук» позволяют существен- но упростить конструкцию этого агрегата. На рисунке 85 показана схема такого автомата перекоса. 113
Рисунок 84. Система управления, при которой три канала управления соединены непосредственно с автоматом перекоса. Автомат перекоса типа «паук» имеет шаровой шарнир 4, расположенный внутри стакана, находящегося внутри втулки несущего винта. В конусообразном стакане 6 подвешен стальной рычаг 7, имеющий в месте подвески шаровую поверхность. Рычаг 7 отклоняется в любом направлении.
На верхнем конце этого рычага на двух конических подшипниках смонтирована втулка 1, к которой присоединены изогнутые стержни 2. Концы этих стержней лежат в одной плоскости с центром шарового шарнира и соединяются с рычагами лопастей. Рычаги крепятся к лопастям с помощью шарнира 3. Один из изогнутых стержней крепится ко втулке жестко и служит поводком для втулки, а остальные присоединяются к ней подвижно. Движением вперед, назад или в стороны конца рычага 7 создается соответствующее циклическое изменение шага несущего винта и осуществляется продольное и поперечное управление. Перемещение стакана 6 вверх и вниз изменяет общий шаг несущего винта. 114
Рисунок 85. Конструктивная схема автомата перекоса типа «паук». 1 – втулка, 2 – изогнутый стержень, 3 –шарнир поводка лопасти, 4 – шаровой шарнир автомата перекоса, 5 – чехол, 6 – стакан, 7 – рычаг автомата перекоса. Небольшая масса и простота обуславливают применение этих автоматов перекоса на легких и сверхлегких вертолетах.
Отсутствие большого количества элементов управления, расположенных снаружи вала и главного редуктора, снижает риск поражения жизненно важных систем вертолета системами вооружения. Это является преимуществом при использовании «пауков» на военных летательных аппаратах. Автомат перекоса кривошипного типа применяется достаточно редко. Он, также как автомат-перекос типа «паук», имеет проводку управления внутри редуктора и размещается сверху втулки. 115
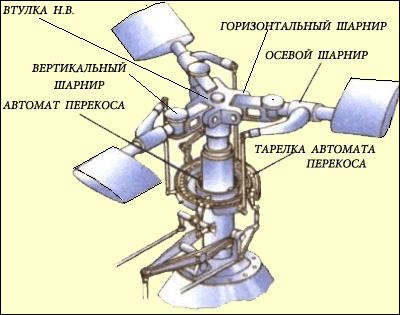
6.7. Компенсатор взмаха и угол опережения Наличие махового движения лопастей привело к появлению компенсатора взмаха, способного уменьшить это не всегда желательное явление. Компенсатор взмаха это кинематическая связь (рисунок 86), обеспечивающая автоматическое уменьшение угла установки лопасти при взмахе вверх и увеличение его при опускании лопасти.
Компенсатор взмаха характеризуется коэффициентом пропорциональности k = tgσ 1 . Угол σ 1 определяется линией, соединяющей шарнир поводка лопасти с серединой горизонтального шарнира и осью горизонтального шарнира. Наличие этого угла и жесткой связи системы управления с поводком приводит к тому, что при взмахе лопасти вверх происходит ее поворот относительно осевого шарнира.
Угол установки уменьшается, снижается подъемная сила, и лопасть начинает опускаться. При маховом движении вниз происходит обратный процесс. Однако если угол σ 1 =0, то есть ось шарнира поводка лежит на оси горизонтального шарнира, угол установки лопасти не зависит от ее махового движения.
При циклическом изменении углов установки лопастей за счет инерционных и аэродинамических сил происходит фазовое отставание их махового движения. В результате плоскость Рисунок 86. Схема изменения угла ϕ установки лопасти при ее взмахе под действием регулятора взмаха. 1 – горизонтальный шарнир, 2 – осевой шарнир, 3 – поводок управления шагом лопасти.
наклона оси конуса несущего винта не будет совпадать с плоскостью, требуемой для управления вертолетом. Для уменьшения взаимного влияния продольного и поперечного управления вводится угол опережения изменения циклического угла установки лопастей. (рисунок 87). Таким образом лопасти, например осуществляют изменение продольного шага еще до прохода лопастью продольной оси винта.
Аналогичное изменение происходит и с поперечным управлением. Рисунок 87. Схема угла опережения управления — Δψ. 1 – продольная и поперечная ось несущего винта, 2 – оси продольного и поперечного управления.
7. ВЗЛЕТНО-ПОСАДОЧНЫЕ УСТРОЙСТВА 7.1. Общие сведения Взлетно-посадочные устройства вертолетов – шасси – предназначены для перемещения по взлетно-посадочной полосе и восприятия кинетической энергии удара при посадке. Существует несколько схем шасси: колесные, полозковые, лыжные, поплавковые, лодка и др.
Посадочные устройства могут быть также выполнены и в виде комбинации из двух схем. Например, на вертолете-амфибии посадочными устройствами являются лодка и колесные шасси. Лыжное шасси может быть выполнено в комбинации с колесным. На некоторые варианты вертолетов устанавливаются баллонеты для выполнения аварийных посадок на воду.
Чаще всего на вертолетах применяется колесное шасси. На стоянке вертолет имеет либо четыре точки опоры, расположенные симметрично относительно оси фюзеляжа (четырехколесное шасси), либо три точки опоры — две опорные точки расположены симметрично относительно оси фюзеляжа вертолета – это главные опоры шасси, третья опорная точка располагается по оси фюзеляжа вертолета – это хвостовая или передняя (носовая) опора шасси (рисунок 88).
Главные опоры шасси помещаются вблизи центра тяжести вертолета, а третья его опора — на значительном удалении от центра тяжести. Схема шасси с передним колесом обеспечивает хорошую путевую устойчивость и обзор при разбеге и пробеге. Шасси с носовым колесом имеет на конце хвостовой балки опору для предохранения от удара о землю при грубой посадке. Основные параметры шасси с носовой стойкой указаны на рисунке 89 . Расстояние от колес главных опор шасси до центра тяжести вертолета выбирают, исходя из того, что на эти колеса должно приходиться 85-90 % веса вертолета. Такое расположение нагрузки обеспечивает продольную устойчивость вертолета и путевое управление при маневрировании. Величина b должна быть такой, чтобы вертолет при загрузке через гру-
Рисунок 88. Передняя и главная опора убирающегося шасси вертолета Ка-50. зовой люк, посадке на главные колеса и движении по земле не опрокидывался на хвостовую опору. Величина с , называетсяазой шасси. Минимально необходимая колея шасси В определяется с учетом поперечной устойчивости вертолета.
При большой колее вертолет становится чувствительным к ударам в колеса главных опор шасси, вследствие возрастания момента рыскания, при малой – не обеспечивается поперечная устойчивость вертолета. Угол опрокидывания Θ определяется из условия безопасности посадки вертолета на режиме авторотации. Угол, образованный перпендикуляром, опущенным из центра тяжести вертолета на линию, соединяющую точки прикосновения носового колеса и одного из колес главных опор шасси, и вертикальную, опущенной из центра тяжести, называется противокапотажным углом γ . Он выбирается таким, чтобы исключить боковое опрокидывание вертолета (γ>35…40º), угол значительно увеличивается если используется две носовые стойки. Стояночный угол ξ (между строительной горизонталью фюзеляжа вертолета и поверхностью посадочной площадки) необходим для облегчения движения 119
Источник: studfile.net
АВТОМА́Т ПЕРЕКО́СА

Схема автомата перекоса кольцевого типа: 1 – лопасть несущего винта; 2 – осевой шарнир; 3 – тяга поворота лопасти; 4 – вращающееся кольцо; 5 – невращающееся кольцо; 6 – кольцо кардана; 7 – ползун; 8 –.
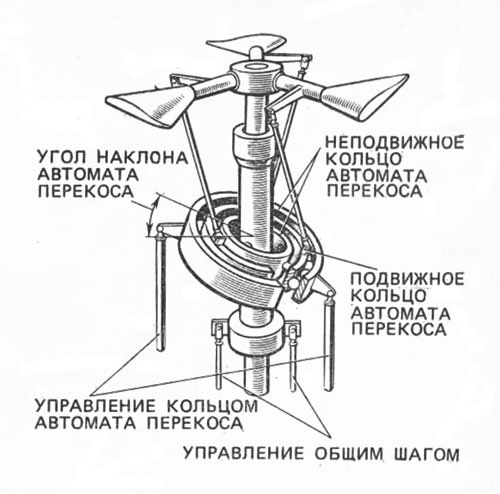
АВТОМА́Т ПЕРЕКО́СА, механизм в системе управления несущим винтом вертолёта, позволяющий регулировать тягу (подъёмную силу) винта и изменять её направление, обеспечивая управляемость вертолёта. В зависимости от конструкции (при одинаковом принципе действия) различают А. п. кольцевого типа, рычажные, кривошипные, типа «паук».
Наибольшее распространение получил А. п. кольцевого типа, изобретённый Б. Н. Юрьевым в 1911. В таком А. п. под втулкой несущего винта установлены два кольца, объединённые подшипником качения в «тарелку» (рис.).
Наружное (вращающееся) кольцо «тарелки» соединено с лопастями несущего винта посредством рычагов и тяг, которые при изменении положения «тарелки» поворачивают лопасти вокруг их осей. Внутреннее (невращающееся) кольцо посредством кардана закреплено на ползуне, который можно перемещать вдоль вала несущего винта. Т. о., поднимая (опуская) ползун, удаётся одновременно одинаково изменять углы установки всех лопастей винта, т. е. регулировать подъёмную силу и тягу несущего винта, обеспечивая управление вертолётом по высоте – набирать высоту, снижаться, «висеть» в воздухе. При перекосе «тарелки» (её наклоне относительно вала) в течение одного оборота винта углы установки лопастей будут изменяться циклически, по гармонич. закону, увеличиваясь на одной части диска вращающегося несущего винта и уменьшаясь на противоположной, что приводит к изменению направления вектора подъёмной силы винта. Т. о., меняя наклон «тарелки», можно управлять движением вертолёта – совершать полёт вперёд, назад, вбок.
Источник: bigenc.ru
Автомат перекоса: принцип работы устройства
Автоматы перекоса позволяют контролировать полет вертолета. Современные модификации выделяются высоким углом наклона по крену и тангажу. Чтобы узнать больше информации об автоматах перекоса, надо рассмотреть существующие устройства.
Автомат перекоса — это специальный механизм, который отвечает за управление винтами вертолета. Также устройства данного типа используются на автожирах и конвертопланах. Стандартный автомат включает в себя набор стоек и опор. Подвижное кольцо устройства крепится в верхней части механизма. Под ним располагается большая тарелка.
Подшипники тяги могут находиться над стойкой или втулкой. Хордовые лопасти подсоединены к тарелке. В нижней части модификаций располагаются шарниры крепления. Под ними находится непосредственно ротор.
Принцип работы автоматов перекоса
Принцип действия автомата перекоса построен на изменении положения винтов. Осуществляется данный процесс за счет смены угла наклона опор. Нижнее кольцо отвечает за стабилизацию тяги. Для управления вертолетом по тангажу применяются задние стойки. Угол наклона у них ограничен.
Подъемная сила вертолета регулируется при помощи передних стоек. Плавность вращения лопастей обеспечивается сферическими подшипниками. Однако, в данном случае многое зависит от типа модификации.
Самодельные модификации
Сделать автомат перекоса вертолета своими руками довольно сложно. В первую очередь для сборки потребуется широкое кольцо диаметром в 25 см. Шарниры должны находиться в нижней части конструкции. Винты крепятся в тарелке. Для этого придется воспользоваться сварочным аппаратом.
Далее, чтобы сделать автомат перекоса вертолета своими руками, заготавливается шаровая опора. Вращающееся кольцо у простых модификаций применяется небольшого диаметра.
Сферические подшипники при этом используются не часто. Циклический шаг лопастей зависит от размеров стойки. После фиксации тарелки можно приступать к установке передних опор. Затем, чтобы собрать автомат перекоса своими руками, применяются шарниры крепления, которые фиксируются под опорной тарелкой. Хордовые лопасти модификации не должны задевать шаровую опору.
В среднем угол наклона по тангажу составляет 30 градусов.
Типы автоматов перекосов
В первую очередь разделение автоматов осуществляется по количеству лопастей. Трехлопастные устройства, как правило, устанавливаются с двойными кольцами. Модификации на четыре лопасти считаются более распространенными. Переходные модификации отличаются наличием широких тарелок в нижней части конструкции.
Также стоит отметить, что существуют коленчатые модификации и устройства с крыльчаткой. В отдельную категорию выделены ходовые модификации, которые используются на автожирах.
Модификации на три винта
Модели на три винта замечательно подходят для вертолетов. Несущие стойки используются разных размеров. Диаметр нижнего кольца, как правило, составляет не более 22 см. У многих модификаций используется несколько тарелок. Управление по тангажу осуществляется через переднюю тягу.
Подшипники сферического типа применяются в автоматах довольно часто.
Непосредственно неподвижная тарелка может устанавливаться под кольцом или над ним. У многих моделей винты крепятся через стойки. Отклонение тарелки в данном случае зависит от размеров боковых стоек. Установочные углы определяются формой тарелки. Втулки чаще всего располагаются в нижней части конструкции.
Недостатком устройств на три лопасти считается малый циклический шаг.
Модели на четыре винта
Устройства на четыре лопасти в основном производятся с кулачковым механизмом. У многих модификаций угол наклона по тангажу не превышает 40 градусов. Проблемы с перекосом контролируются несущими винтами. Если верить экспертам, то модификации со сдвоенными втулками встречаются довольно редко. Вращающиеся кольца устанавливаются различных размеров.
Многие специалисты говорят о том, что подшипники сферического типа хорошо себя зарекомендовали. У многих моделей применяется блокировщик для стойки. Таким образом, наклон по крену у автомата сильно ограничен. Проблемы с перекосом модификации не страшны. Устанавливаются модификации в основном через шарниры.

Переходные устройства
Переходные автоматы широко применяются на вертолетах различных производителей. Если верить экспертам, то к преимуществам устройств следует отнести стабильность. Наклон по тангажу регулируется только передними стойками. Если верить специалистам, то тарелки разрешается использоваться небольшого диаметра. Предельный угол наклона по тангажу у модификаций данного типа равняется 35 градусов.
Подшипники у автоматов, как правило, применяются сферического типа. При этом накладки под них встречаются очень редко. Отдельно важно отметить, что существуют модификации под автожиры. Стойки у них применяются вытянутой формы. Тарелки довольно часто фиксируются в верхней части механизма. Циклический шаг лопастей зависит от размеров фиксированного кольца.
Блокировка у стойки встречается довольно часто. Над тарелкой находятся втулки, которые защищают лопасти.
Соосные модификации с крыльчаткой
Соосный автомат перекоса с крыльчаткой подходит для конвертопланов. Сила тяги у моделей довольно высокая. Если верить экспертам, то стойки применяются небольшой длины. Установка подшипников осуществляется на тарелки. Модификации с большими переходниками встречаются очень редко.
Угол наклона винтов по тангажу, как правило, не превышает 40 градусов. У многих автоматов блокиратор отсутствует. Установка устройств стандартно осуществляется на ротор. В данном случае втулки устанавливаются в два ряда.
Крыльчатки применяются с шарнирными креплениями, которые находятся в нижней части конструкции. По мнению экспертов, тяговая сила модификаций зависит от диаметра тарелок. Циклический шаг лопастей тесно связан с размером стоек, которые находятся по бокам от тарелок с неподвижными кольцами. Подшипники сферического типа у автоматов с крыльчаткой встречаются очень часто.
Многие специалисты утверждают, что модификации страдают отклонением тарелки. Наклон по крену в устройствах сильно ограничен.
Коленчатые устройства
Коленчатые модификации у вертолетов встречаются довольно редко. Сила тяги у них, как правило, находится на высоком уровне. Если говорить про недостатки, то важно упомянуть о сложной управляемости механизма при сильных порывах ветра. Если верить мнению экспертов, то несущие винты располагаться должны в верней части модификации.
Для решения проблем с уклоном тарелки устанавливается блокиратор. Непосредственно передние стойки фиксируются на тарелки.
Предельный угол наклона по тангажу составляет около 40 градусов. Многие модификации производятся без сферических подшипников. Тарелки применяются с накладками и без них. Модификации с подвижными кольцами встречаются довольно редко. Вращательный момент у тарелок высокий.
Стойки за креплением используются небольшой ширины. Внутренние кольца у модификаций данной серии способны выдерживать большие нагрузки. Также стоит отметить, что на рынке представлены модификации с нижним расположением несущих винтов. В таком случае передние стойки применяются небольшой высоты и крепятся под тарелкой.
По словам экспертов, сила подъема у автоматов данной серии довольно высокая. Для современных модификаций они подходят замечательно. Однако недостатки у таких систем также стоит учитывать. В первую очередь — это малый угол по тангажу. На сферические подшипники оказывается большая нагрузка. Наклон по крену максимум достигает 50 градусов. Блокировка стоек используется очень редко.
Установка автоматов данного типа осуществляется только на роторы через шарниры.
Ходовые устройства
Ходовые автоматы отчитаются тем, что их можно использовать на вертолетах, а также на конвертопланах. Многие модификации применяются с длинными стойками и широкой тарелкой. Несущие винты, как правило, находятся в верхней части автомата. Наклон по тангажу в данном случае зависит от ширины подвижного кольца. Проблемы с перекосом винтов у модификаций возникают очень редко.
Защитные втулки устанавливаются над переходником. Крепление к ротору происходит только через шарниры. При этом внутренние кольца часто применяются небольшого диаметра. Основная нагрузка у механизмов оказывается именно на стойки. Циклический шаг у лопастей не сильно высокий.
Также стоит отметить, что модификации данного типа выделяются качественными блокираторами. Шаровые опоры на автоматах встречаются очень редко.
Модификация Сикорского
Автомат перекоса Сикорского является надежным и отличается прочными стойками. Тарелки в данном случае применяются на 23 см. По мнению экспертов, проблемы с наклоном по тангажу возникают нечасто. Несущие винты у моделей находятся выше уровня тарелок. Установка по вертикали осуществляется очень быстро.
Многие специалисты говорят о том, что регулировка по крену происходит очень плавно. Достигнут данный эффект был за счет установки небольших стоек. Предельный угол наклона по тангажу равняется 40 градусов.
Шаровые опоры применяются с накладками. Специалисты говорят, что блокираторы стойки в данном случае работают хорошо. Недостатком модификаций принято считать малый вращающийся момент. Кольца в устройствах изнашиваются довольно быстро. Отдельного внимания у модификаций заслуживают шарниры.
Располагаются они в нижней части конструкции. Отклонение тарелок, таким образом, регулируется довольно просто.

Особенности модели серии МИ 8Т
Данный автомат перекоса винта применяется на вертолетах разных серий. Несущие винты у него установлены на уровне кольца. Работа автомата перекоса осуществляется путем смены положения лопастей. Если верить мнению экспертов, то шаровые опоры способны выдерживать большие нагрузки. В данном случае циклический шаг контролируется отлично.
Подшипники у автомата применяются сферического типа. Западание подшипников при наклоне происходит редко.
При этом износ у колец очень малый. Отдельного внимания заслуживают компактные шарниры. На ротор модификация устанавливается очень плотно. Круговые движения осуществляются плавно, нагрузка на подшипники распределяется равномерно. Предельный наклон по тангажу равняется 30 градусам. Многие эксперты говорят, что тарелки и при больших оборотах быстро стабилизируются.
Отдельно важно отметить, что предельный наклон по крену не превышает 20 градусов.
Параметры модификации серии АВ-1
Представленный автомат перекоса фаз выделяется низкими стойками. Предельный наклон по тангажу в данном случае равняется 50 градусов. Подшипники тяги применяются с накладками. Если верить мнению экспертов, то проблемы с блокировкой стойки возникают очень редко. Тарелка в данном случае установлена на 23 см. Несущие винты у модификации находятся выше уровня тарелки.
Втулки в данном случае способны прослужить долгое время.
Отклонение тарелки контролируется на хорошем уровне. Циклический шаг лопасти регулируется только передними стойками. Наклон по крену равняется 30 градусов. Установка по вертикали выполняется довольно быстро. Подшипники сферического типа располагаются только над тарелкой.
Отличия устройств В 912
Автомат перекоса представленной серии выделяется хорошим переходником. Данное устройство относится к кулачковым механизмам. Однако шарниры крепления у модификации находятся в нижней части модификации. Подшипники применяются только на тарелке. Установка лопастей по вертикали много времени не отнимает.
Предельный угол наклона по крену равняется 25 градусов. Многие эксперты говорят о том, что устройство обладает отличной стабилизацией. Также стоит отметить, что вращающиеся кольца используются диаметром в 34 см.
Защитные втулки применяются только на передних стойках. Предельный угол наклона по крену не превышает 55 градусов. Проблемы с прекосами этому автомату не страшны. Крепление модификации на ротор стандартно осуществляется через шарниры. Многие специалисты отмечают, что регулировка лопастей по горизонтали происходит очень быстро.
Блокировка стойки у модели отсутствует.
Особенности модели серии В 915
Представленный автомат перекоса от прочих модификаций отличается большим наклоном по крену. Относится устройство к коленчатым типам. Несущие винты располагаются на уровне подшипников тяги. Если верить экспертам, то пробелы с перекосом не наблюдаются. При этом защитные втулки находятся под стойкой и над ней.
Ходовые лопасти способны выдерживать большие нагрузки.
Шаровые опоры в данном случае применяются с накладками. Предельный угол наклона по тангажу равняется 55 градусов. По словам специалистов, блокиратор работает хорошо. Среди недостатков стоит упомянуть о быстром износе колец. Циклический шаг лопастей регулируется не очень плавно.
Крепление у шарниров оставляет желать лучшего. Для конвертопланов модификация данной серии не подходит.
Параметры модификации серии В 920
Представленный автомат перекоса вертолета производится с четырьмя стойками. Вращаются они свободно, предельный угол крена равняется 35 градусов. Несущие винты установлены на уровне подшипникового ряда. Тарелка используется из нержавеющей стали, а ее диаметр равняется 4 см. Многие эксперты говорят о том, что модификация производится с качественными шарнирами крепления, и в установке она довольно проста.
Втулки в данном случае располагаются только над защитным кольцом. Предельный угол наклона по тангажу составляет 50 градусов. Вращающееся кольцо производителем применяется на 30 см. Блокировка стойки у данного автомата отсутствует. Некоторые эксперты говорят о том, что модификация может применяться на автожирах. Также стоит отметить, что у модели установлено две шаровые опоры.
Проблемы с прекосом им не страшны.

Отличия устройств V922-04
Данный автомат перекоса вертолета выделяется большой стабилизацией тарелки. Также стоит отметить, что предельный угол наклона по тангажу составляет 45 градусов. Установка лопастей по вертикали много времени не отнимает. Если говорить про недостатки, то важно отметить низкую посадку тарелки. Предельный угол наклона по крену не превышает 50 градусов.
Вращающееся кольцо применяется диаметром в 30 см. Подшипники у автомата используются только сферического типа. Шаровые опоры у модификации отсутствуют. Блокировка стойки стандартно установлена под тарелкой. Подшипники тяги применяются без накладок.
Установка лопастей по горизонтали происходит довольно быстро. Отклонение тарелки происходит очень редко. При этом циклический шаг лопастей регулируется без проблем.
Особенности модели МИ 8
Автомат перекоса вертолета МИ 8 имеет массу преимуществ. В первую очередь важно отметить, что модификация относится к переходным устройствам. Несущие винты в данном случае располагаются на уровне втулок. Установка по вертикали занимает довольно много времени. Предельный угол по крену составляет не более 40 градусов. Ходовые лопасти способны выдерживать больше нагрузки.
Также стоит отметить, что автомат перекоса МИ 8 делается со сферическими подшипниками. Многие эксперты указывают на низкую прочность опор. При этом тарелка применяется малого диаметра. Отдельного внимания в устройстве заслуживает малый угол наклона по тангажу. Шаровые опоры в данном случае установлены над тарелкой.
Крепеж модификации осуществляется через ротор. Крепления в данном случае применяются небольшой ширины. Отклонения тарелки при значительных нагрузках сильно заметны. При подъеме большая нагрузка направляется именно на шаровые опоры.

Параметры модификации серии 8-1950-000
Автомат перекоса 8-1950-000 пользуется большим спросом. Подходит он не только для вертолетов, но и автожиров. Автомат перекоса 8-1950-000 оснащен качественными опорными стойками. Установка лопастей по вертикали происходит быстро. При этом проблемы со стабилизацией тарелки модификации не страшны.
Некоторые эксперты также указывают на прочность шарнирных креплений.
Несущие винты у автомата располагаются на уровне блокировки стойки. Шаровые опоры стандартно находятся под кольцом. Если говорить про показатели, то предельный угол наклона по тангажу равняется 35 градусов. Тарелка на автомат перекоса 1950 установлена диаметром в 22 см. Максимальный угол наклона здесь составляет 40 градусов.
Циклический шаг лопасти можно регулировать очень плавно.
Отличия устройств 8-1975-000
Это качественный кулачковый автомат перекоса вертолета. Принцип действия устройства построен на изменении угла наклона лопастей. Если говорить про показатели, то диаметр тарелки равняется только 34 см. Несущие винты располагаются на уровне сферических подшипников.
Модификация способна выдерживать большие нагрузки. Однако важно отметить, что максимальный угол по крену не превышает 40 градусов. Блокировка стойки в данном случае отсутствует. Отдельного внимания заслуживает компактная шаровая опора. Проблемы со скручиванием ей не страшны.
Установка лопастей по вертикали происходит довольно быстро.
Для регулировки циклического шага лопастей применяются передние опоры. Для конвертопланов модификация этой серии не подходит. Шарнирные крепления у нее находятся под тарелкой. Защитное кольцо у модификации фиксируется на втулке. Накладка на шаровой опоре изнашивается очень медленно.
Для автожиров данный автомат перекоса не подходит.
Источник: fb.ru
Автомат перекоса

Автомат перекоса — механизм для управления несущим винтом вертолётов, автожиров и конвертопланов[1]. Автомат перекоса обеспечивает управление вертикальным перемещением вертолёта, а также его наклоном по крену и тангажу; для этого автомат периодически изменяет угол установки каждой лопасти винта в зависимости от того, где лопасть оказывается в определённый момент времени в ходе вращения винта как целого.
Каждая из лопастей несущего винта, по сути, представляет собой небольшое крыло, создающее подъёмную силу за счёт набегающего потока воздуха. При этом действующая на лопасть подъёмная сила зависит от ряда факторов, в том числе от скорости движения лопасти относительно воздуха, а также её установочного угла, то есть угла между хордой лопасти и плоскостью вращения винта. Чем больше этот угол, тем большую подъёмную силу обеспечивает лопасть несущего винта.
В большинстве конструкций обороты несущего винта стараются поддерживать постоянными. В этом случае единственной переменной величиной остаётся установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъёмная сила увеличивается, а при уменьшении — соответственно уменьшается, что обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот.

Наклон вертолёта вперёд или назад (по тангажу) и вбок (по крену) достигается созданием разницы подъёмных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени. Так, например, для наклона вертолета вперёд лопасти несущего винта увеличивают свой установочный угол, проходя над задней частью вертолёта, и уменьшают над передней, что приводит к соответствующему изменению их подъёмных сил. Их разность создаёт момент, заставляющий вертолёт наклоняться вперёд.
Подъёмная сила несущего винта приложена к его втулке и в общем случае может быть рассмотрена как перпендикулярная его плоскости. При наклоне вертолёта в какую-либо сторону эта сила перестаёт быть строго вертикальной, в результате чего возникает противодействующий наклону момент сил «подъёмная сила — сила тяжести» (последняя приложена к центру тяжести вертолёта и направлена вертикально вниз); наклон прекратится, когда два упомянутых момента взаимно скомпенсируют друг друга. Помимо этого, при наклоне подъёмная сила приобретает горизонтальную составляющую в этом направлении, что используется для управления горизонтальным движением вертолёта.

Описанный выше момент аэродинамических сил, действующий на вращающийся винт, в силу гироскопического эффекта создаёт дополнительный прецессионный момент, приводящий к дополнительному наклону винта в направлении, перпендикулярном первоначальному. Для компенсации этого и прочих возмущений, в том числе связанных с перемещениями лопастей в соединяющих их со втулкой винта шарнирах, в работу автомата перекоса вводят дополнительные поправки.
Источник: www.drive2.ru
Автомат перекоса вертолета. Общий принцип управления.

Втулка несущего винта с автоматом перекоса вертолета МИ-8.
Снова вернемся к нашим вертолетам :-), этим красивым и удивительным (несмотря на их кажущуюся сегодня обычность) аппаратам. Поговорим немного подробнее о принципах их управления.
В статье «Как летает вертолет» я этого уже коснулся. Для того чтобы вертолет двигался поступательно, нужен перекос винта, и создает его такой агрегат, как автомат перекоса вертолета. Вот о нем сегодня и поговорим.
Как известно для вертолета полная аэродинамическая сила — это сумма всех сил, действующих на каждую лопасть в отдельности. Силы эти я бы разделил на искусственные и на естественные.
О естественных . Каждая лопасть имеет определенный вес. Поэтому при вращении с достаточно большой скоростью на нее действует центробежная сила . Есть еще сила сопротивления и конечно подъемная сила лопасти. Вот эту самую подъемную силу вполне можно корректировать силами искусственными . А это как раз и делает автомат перекоса винта вертолета. От него к каждой лопасти протянута специальная тяга, с помощью которой изменяется угол установки лопасти, то есть по сути дела угол атаки и, как следствие, подъемная сила.
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º . Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º — это лопасть наступающая , а от 180º до 360º — отступающая . Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила. (Для примера приведу пояснительный рисунок из «заслуженной» книги об управлении вертолетом МИ-1 .)
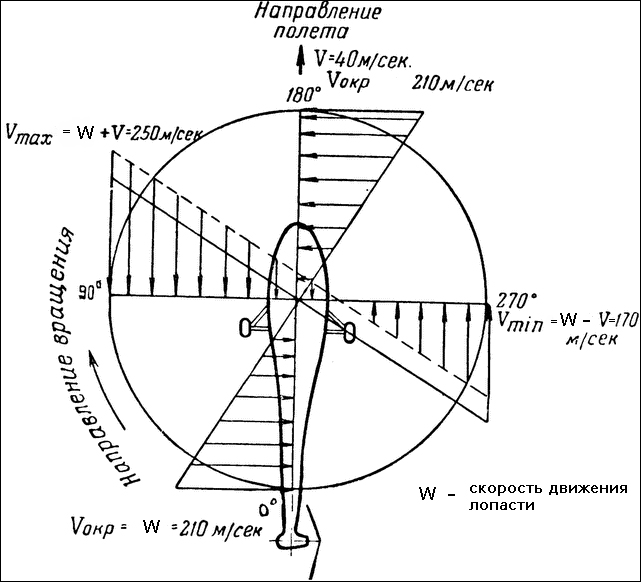
Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает» :-). В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент . При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
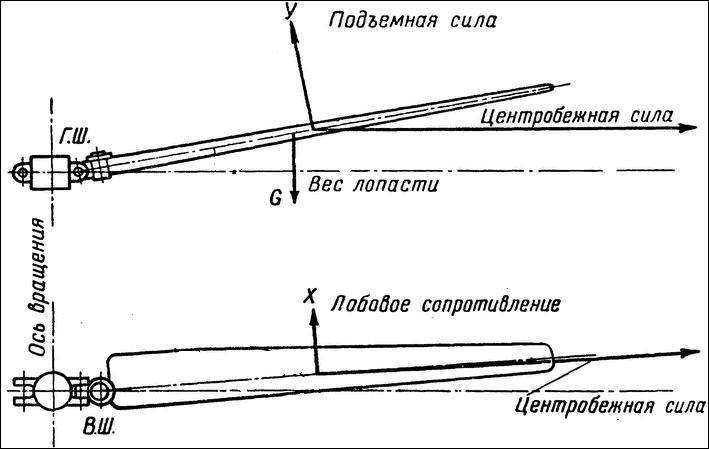
Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах »).
Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шарнир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
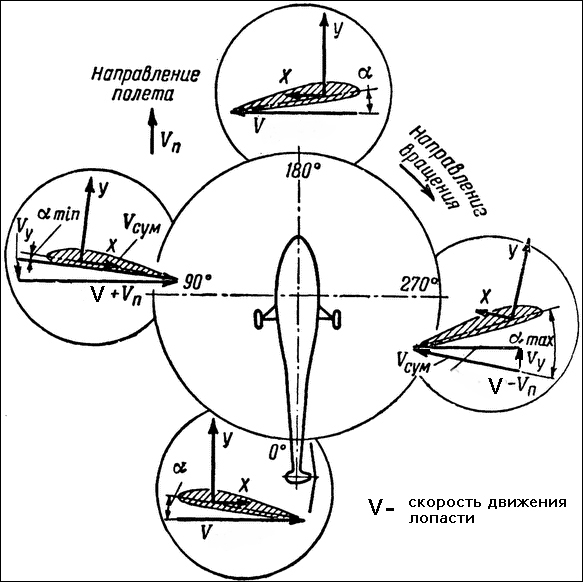
Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º . Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции .
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тяг автомата перекоса вертолета. Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º , опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы « машут » или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в 10 раз , а центробежная – в 100 раз . Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта .
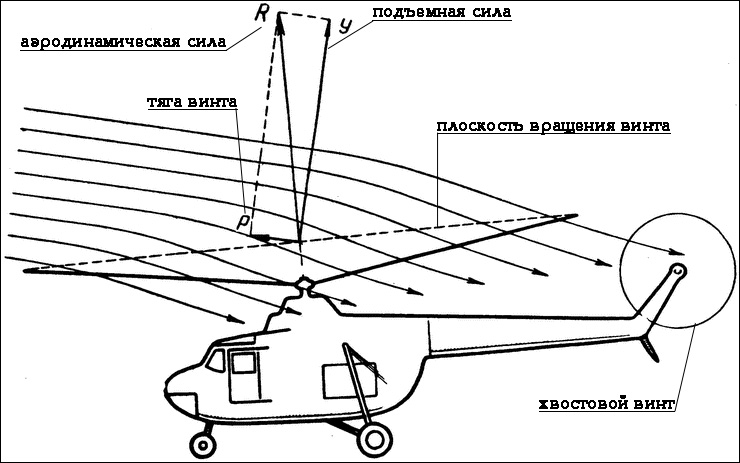
Силы, действующие на вертолет.
Теперь главная мысль :-). В известной статье я уже говорил, что для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º) . Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично .Он так и называется циклический угол установки лопасти ( циклический шаг винта ). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия как раз и выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз :-)), а крен , соответственно, относительно его продольной оси (наклон влево-вправо :-)).
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же :-).
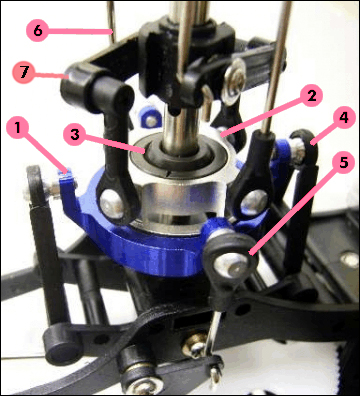
Автомат перекоса модели вертолета.
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6 . Эти тяги соединены с так называемой внутренней тарелкой 2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3 . При изменении своего наклона (углового положения) она воздействует на тяги 6 , которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1 . Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5 . Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении :-).
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7 . В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса. Комментировать их нет смысла :-)…
Втулка винта с автоматом перекоса (схема).
Поворот лопасти в вертикальном шарнире втулки несущего винта.
Изменение общего шага винта, лопасти поворачиваются в осевых шарнирах.
Вот пожалуй и все. Как видите, принципиально все достаточно просто. Конечно в практическом плане автомат перекоса вертолета — агрегат сложный, включающий в себя различные специальные узлы и устройства.

Втулка несущего винта с автоматом перекоса вертолета МИ-2.
В одной из следующих статей мы этого коснемся, а также рассмотрим как же непосредственно управляется вертолет из кабины пилота с использованием автомата перекоса и специальных органов управления.
В заключение я предлагаю вам посмотреть два ролика, которые достаточно наглядно иллюстрируют работу автомата перекоса несущего винта. Полезного просмотра и до новых встреч :-)…
- Как летает вертолет.
- Авторотация.
- Воздушный винт.
- Турбореактивный двигатель, как тепловая машина. Принцип работы. Просто.
- Угол атаки и аэродинамические силы. Раскрываем маленький секрет.
Источник: avia-simply.ru